一种半球谐振陀螺及其激励检测方法与流程
本发明属于惯性器件领域,涉及哥氏振动陀螺,特别涉及一种基于叉指电极励磁和光学检测的半球谐振陀螺,以及其激励检测方法。
背景技术:
1、半球谐振陀螺具有高精度、高可靠性、长寿命、体积小、重量轻、功耗低等综合优势,成为当前国内外惯性技术领域研究的热点,相关产品在航空、航天、航海、陆战、勘探等军事和民用领域得到了广泛的应用。半球谐振陀螺理论精度与体积无关,可以同时实现“高精度和小型化”乃至“微型化”,在未来的智能化、无人化、轻量化、集群式和单兵作战等装备中具有显著的性能优势,因此研发新型半球谐振陀螺产品,不断提升其综合性能,满足多领域迫切的应用需求,具有重要的军事意义和经济价值。
2、半球谐振陀螺基于载体旋转时哥氏效应引起的谐振子驻波的进动效应来敏感角速度,激励和检测技术是陀螺工作的基础和关键技术。
3、在激励技术方面,成熟半球谐振陀螺中采用静电激励技术,即通过在谐振子和底座表面镀制金属薄膜形成电容,施加电压时谐振子和底座表面(可近似看成平行板电容器的两个极板)会产生静电力相互作用,从而通过受迫振动实现谐振子的共振激励。静电激励技术比较成熟,但是需要在谐振子表面镀制金属薄膜,镀膜一方面会带来额外的损耗(包括机械损耗和电损耗)降低谐振子品质因数,增加频率裂解,影响陀螺的性能,另一方面薄膜长期稳定性和可靠性存在隐患,镀膜程序也增加了成本。部分哥氏振动产品中采用压电激励技术,即在谐振子表面粘接压电陶瓷片,施加电压时通过逆压电效应实现谐振子的激励。压电激励技术比较成熟,激励力较大,但是粘接压电陶瓷会大幅降低谐振子的品质因数,增加频率裂解,影响陀螺性能;同时胶粘压电陶瓷也存在长期稳定性和可靠性隐患。
4、在检测技术方面,成熟半球谐振陀螺中采用静电检测技术,即通过在谐振子和底座表面镀制金属薄膜形成电容,谐振子振动时电容间隙发生变化引起电容和电流变化,经过缓冲放大电路实现微弱信号检测。静电检测技术比较成熟,但是要求谐振子表面必须镀膜,如上文静电激励部分所述,同样会降低谐振子品质因数(包括机械损耗和电损耗),增加频率裂解,影响陀螺性能;而且,静电检测容易受外部电磁信号的干扰,包括静电激励的辐射信号和寄生电容信号干扰等。压电检测技术通过压电效应实现谐振子振动信号检测,如上文压电检测部分所述,同样会降低谐振子品质因数,增加频率裂解,影响陀螺性能。部分学者提出光学检测方法,例如激光多普勒原理、光学隧道效应等,但是这些工作仅研究检测技术本身,并没有和激励技术及陀螺整机性能综合起来分析。
5、综上,当前半球谐振陀螺激励和检测技术仍存在谐振子结构复杂(需要镀膜或粘接压电陶瓷)、谐振子品质因数低、增加频率裂解、激励和检测信号互相干扰、陀螺精度和可靠性受影响等诸多问题,亟待寻找新的激励和检测技术解决上述问题,提高陀螺性能。
技术实现思路
1、本发明的目的之一是针对当前半球谐振陀螺激励和检测技术仍存在谐振子结构复杂(需要镀膜或粘接压电陶瓷)、谐振子品质因数低、增加频率裂解、激励和检测信号互相干扰、陀螺精度和可靠性受影响等诸多问题,提出了一种基于叉指电极激励和光学检测的新型半球谐振陀螺。
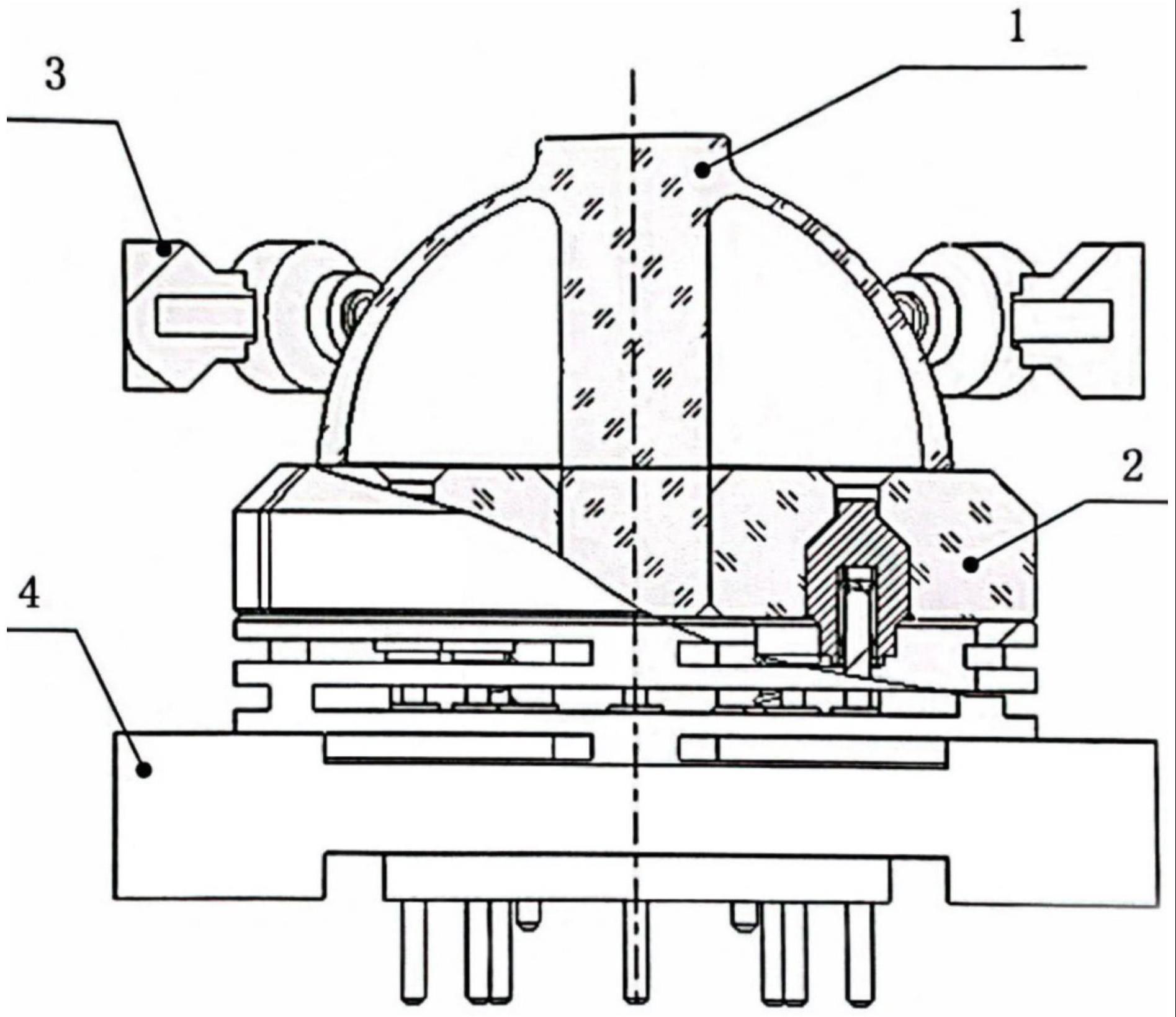
2、本发明解决其技术问题所采用的技术方案是:一种半球谐振陀螺,包括激励底座和连接在激励底座中心孔的半球谐振子,谐振子的底座上沿中心向外缘依次设置有用于激励的叉指电极和实现信号检测的光电检测装置,所述的叉指电极和光电检测装置数量相同且有多个,分别落在两个同心圆的圆周上,相邻的叉指电极和光电检测装置位于一条径线上,还包括用于支撑激励底座和真空密封谐振子组件及叉指电极引线的真空电连接器,所述的叉指电极通过导电插针与真空电连接器相连。
3、所述的一种半球谐振陀螺,其谐振子和激励底座中心孔通过加热铟焊或光胶的方式实现装配连接成结构组件,半球谐振子采用唇沿处较厚的变壁厚结构,谐振子的唇沿平面与激励底座平面之间的间距为10μm~100μm。
4、所述的一种半球谐振陀螺,其叉指电极采用先镀制导电薄膜后激光刻蚀,或掩模板直接镀膜的方式形成在谐振子表面,所述光电检测装置为激光多普勒测振装置。
5、所述的一种半球谐振陀螺,其激励底座采用平板电极结构设计,经过打孔、抛光、清洗后形成光洁表面。
6、所述的一种半球谐振陀螺,其谐振子由高品质因数熔融石英玻璃通过“范成法”精密研磨而成,具有很高的几何形位精度(圆度、同心度均小于1μm)和超高的品质因数(q值大于3000万)。
7、所述的一种半球谐振陀螺,其导电插针内部与叉指电极连接,外部与前置放大板连接,所述的叉指电极和导电插针之间可以通过金丝焊线或者平面导电通路连接。
8、所述的一种半球谐振陀螺,其激励底座通过弹簧压圈与真空电连接器相联结。
9、所述的一种半球谐振陀螺,其叉指电极和光电检测装置均可以为2个、4个或8个。
10、本发明的目的之二是提供一种基于叉指电极励磁和光学检测的半球谐振陀螺的激励检测方法,在完成半球谐振陀螺表头制备、叉指电极驱动、光学检测的基础上,最后实现半球谐振陀螺全角跟踪控制模式闭环控制和角度信号结算,包括如下步骤:
11、s1,基于幅度控制、正交控制、速率环控制和锁相环控制四个控制回路控制陀螺正常工作;
12、s2,以8个叉指电极为例,沿顺时针方向对将8个叉指电极依次编号为21~28,将对应的半径上的8个光电检测装置依次编号为31~38,8个叉指电极21~28驱动时要进行标校,保证驱动增益和相位的一致性,将叉指电极21、23、25、27列为一组,驱动信号x为21+25-23-27,将模态正交方向的叉指电极22、24、26、28列为一组,驱动信号y为22+26-24-28,并采用合力驱动模式;
13、s3,采用差分检测方式,将光电检测装置31、33、35、37列为一组,差分检测信号x为31+35-33-37,将模态正交方向的光电检测装置32、34、36、38列为一组,差分检测信号y为32+36-34-38;
14、s4,对光电检测装置输出的两组差分检测信号,对x、y进行乘法信号解调得到同相信号cx、sx和正交信号cy、sy:
15、x=acosθcos(ωt+φ′)-qsinθsin(ωt+φ′)
16、y=asinθcos(ωt+φ′)+qcosθsin(ωt+φ′)
17、cx=2×lpf(x×cos(ωt+φ))
18、sx=2×lpf(x×sin(ωt+φ))
19、cy=2×lpf(y×cos(ωt+φ))
20、sy=2×lpf(y×sin(ωt+φ))
21、其中a为椭圆长轴,q为椭圆短轴,θ为角度,ω为振动频率,φ′为初始相位,φ是参考信号相位。令δφ=φ-φ′,得到:
22、cx=acosθcosδφ+qsinθsinδφ
23、sx=acosθsinδφ-qsinθcosδφ
24、cy=asinθcosδφ-qcosθsinδφ
25、sy=asinθsinδφ+qcosθcosδφ
26、按照lynch模型经过慢变量计算得到参数e、q、r、s、l:
27、
28、q=2(cxst-cysx)=2aq
29、
30、s=2(cxcy+sxsy)=(a2-q2)sin2θ
31、l=2(cxsx+cysy)=(a2-q2)sin2δφ;
32、幅度控制回路通过信号解调、慢变量计算得到的e用于幅度控制,通过pid控制得到驱动力(反馈力)为fas,实现稳幅的目的;正交控制回路通过信号解调、慢变量计算得到的q用于正交控制,通过pid控制得到驱动力(反馈力)为fqc,实现正交控制的目的,速率环控制回路用于实时角速率或角度解算,在力平衡模式下施加控制力fqs,全角模式下不需要施加控制力fqs,通过全角跟踪技术可以提高角度精算精度;锁相环控制回路用于实时跟踪谐振子的中心频率ω,并以此生成参考信号用于乘法解调和驱动力控制;r、s用于角度解算,先得到角度θr,然后再通过坐标变换方式以θ-θr为变量进行全角跟踪控制,提高全角陀螺角度检测精度;l用于锁相环输出中心频率和相位信息,作为乘法解调和的参考信号,也是控制力的参考信号;
33、当陀螺处于稳定控制时,lynch慢变量控制方程如下:
34、
35、
36、
37、
38、s5,之后驱动力和控制回路以幅度控制的反馈力fas和正交控制的反馈力fqc为基础,以锁相环给出的频率w和相位信息,通过参数r和s结算出来的角度中信息,进行力的合成与控制:
39、fx=fascosθsin(ωt+φ)-fqssinθsin(ωt+φ)+faccosθcos(ωt+φ)
40、-facsinθcos(ωt+φ)
41、fy=fassinθsin(ωt+φ)+fqscosθsin(ωt+φ)+facsinθcos(ωt+φ)
42、+fqccosθcos(ωt+φ);
43、与现有的半球谐振陀螺及激励检测方案相比,本发明具有以下优点:
44、1,谐振子不需要镀膜,工序简洁,避免镀膜引入损耗(包括机械损耗和电损耗),保持谐振子超高品质因数和极低频率裂解,提升陀螺性能。
45、2,激励和检测之间相互独立,静电激励和检测信号间没有干扰,也避免了静电检测环节寄生电容的影响,而且光学检测灵敏度更高。
46、3,基于叉指电极激励和光学检测的陀螺设计,本发明方法采用全角跟模式进行信号解算和误差补偿,可以提升陀螺精度、动态范围、环境适应性等综合性能。
- 还没有人留言评论。精彩留言会获得点赞!