基于激光测量仪的垂直度和平行度测量装置及其测量方法与流程
本申请涉及测量,具体涉及基于激光测量仪的垂直度和平行度测量装置。
背景技术:
1、激光平直度测量仪是基于激光和光电位置传感器(psd)的几何形位误差测量仪器,能够实现平直度等测量功能。激光平直度测量仪与电子水平仪与自准直仪相比,激光平直度测量仪输出量为位移值而非角度值,因此没有使用桥板或等间距的要求。而且,激光平直度测量仪只有出射光路而没有返回光路,因此光路调整比激光干涉仪简便许多。同时,激光平直度测量仪最大测量距离超过40米、无惧断光、高低和水平两个方向可同时进行测量,可支持最多10根轴垂直度一次性测量。因此,激光平直度测量仪在精密机械装备行业、新能源及芯片专用设备、激光加工设备、精密仪器制造和自动化行业的应用逐渐增多。
2、现有的检测方法只对激光平直度测量仪水平方向和竖直方向位移的示值误差进行检测,对于垂直度和平行度却没有合适的检测装置与检测方法。
3、随着市场对激光平直度测量仪需求的逐年提高,客户对平行度和垂直度测量数据是否准确也将提出更高的要求,因此设计一套激光平直度测量仪的垂直度和平行度检测装置不仅具有良好前景,而且意义重大。
技术实现思路
1、本申请的目的是针对现有技术中存在的上述问题,提供了基于激光测量仪的垂直度和平行度测量装置及其测量方法。
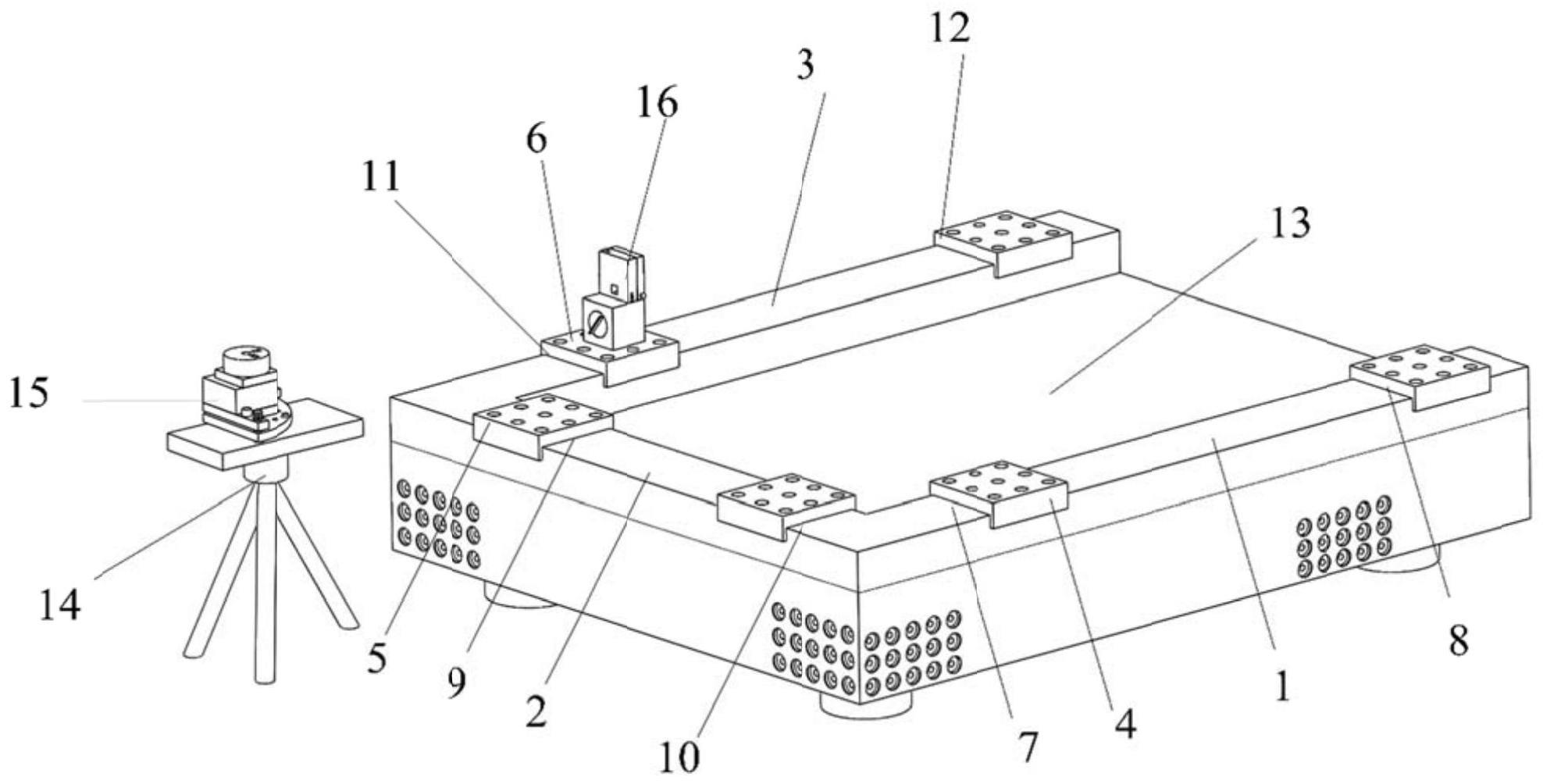
2、为了实现上述申请目的,本申请采用了以下技术方案:基于激光测量仪的垂直度和平行度测量装置包括:
3、激光发射器,安装于微动台架顶部,用于发射激光;
4、底座,设于微动台架一侧;
5、第一导轨,安装于底座顶部,并设有第一运动平台,该第一运动平台能够运动至第一导轨长度方向两端的第一检测位置和第二检测位置;
6、第二导轨,安装于底座顶部,并设有第二运动平台,该第二运动平台能够运动至第二导轨长度方向两端的第三检测位置和第四检测位置;
7、第三导轨,安装于底座顶部,并设有第三运动平台,该第三运动平台能够运动至第三导轨长度方向两端的第五检测位置和第六检测位置;
8、接收器,可拆卸安装于第一运动平台、第二运动平台和第三运动平台上,能够随运动平台沿导轨长度方向来回移动,用于接收激光;
9、在测量垂直度时,第一导轨与第二导轨互相垂直设置;
10、在测量平行度时,第一导轨与第三导轨互相平行设置。
11、进一步地,第一导轨、第二导轨和第三导轨均安装于底座边缘处。
12、基于激光测量仪的垂直度和平行度测量方法,通过上述的基于激光测量仪的垂直度和平行度测量装置进行测量,具体包括以下步骤:
13、s00、在测量垂直度时,将第一导轨和第二导轨垂直放置;在测量平行度时,将第一导轨和第三导轨平行放置;
14、s10、调整微动台架的位置,使得激光发射器位于第一导轨的正前方,并将接收器固定于第一运动平台上,通过调整激光发射器的光路,使得激光发射器发射的激光能够射入接收器的标靶区域;
15、s20、将第一运动平台移动分别移动至第一检测位置和第二检测位置,采集第一数据和第二数据;
16、s30、将接收器固定于第二运动平台上,同样调整微动台架的位置并调整光路;
17、s40、将第二运动平台分别移动至第三检测位置和第四检测位置,采集第三数据和第四数据;
18、s50、将接收器固定于第三运动平台上,同样调整微动台架的位置并调整光路;
19、s60、将所述第三运动平台分别移动至第五检测位置和第六检测位置,采集第五数据和第六数据;
20、s70、根据第一数据、第二数据、第三数据、第四数据、第五数据以及第六数据进行分析处理,以获得垂直度检测值或平行度检测值;
21、s80、将垂直度检测值与两条导轨自身的垂直度标准值比较,以得到垂直度测量误差;将平行度检测值与两条导轨自身的平行度标准值比较,以得到平行度测量误差。
22、进一步地,s20步骤中,通过以下公式对数据进行分析处理,拟合一条直线l1:
23、
24、其中,(x1,y1)表示在第一检测位置采集第一数据的坐标值,(x2,y2)表示在第二检测位置采集第二数据的坐标值。
25、进一步地,s40步骤中,通过以下公式对数据进行分析处理,拟合一条直线l2:
26、
27、其中,(x3,y3)表示在第三检测位置采集第三数据的坐标值,(x4,y4)表示在第四检测位置采集第四数据的坐标值。
28、进一步地,s60步骤中,通过以下公式对数据进行分析处理,拟合一条直线l3:
29、
30、其中,(x5,y5)表示在第五检测位置采集第五数据的坐标值,(x6,y6)表示在第六检测位置采集第四数据的坐标值。
31、进一步地,s70步骤中,在测量垂直度时,通过以下公式对数据进行分析处理:
32、
33、其中,k1、k2为两条直线l1、l2的斜率;
34、在测量平行度时,通过以下公式对数据进行分析处理:
35、α1=(arc tan k1)°
36、α3=(arc tan k3)°
37、α=(α3-α1)°
38、其中,α1、α3为两条直线l1、l3的倾角,k1、k3为两条直线l1、l3的斜率。进一步地,s70步骤中,垂直度测量值为3600(θ-90)″或3600*(θ-90)*tan(1″)μm/m;平行度测量值为3600α″或3600α*tan(1″)μm/m。
39、进一步地,s80步骤中,通过以下公式对数据进行分析处理:
40、δ=垂直度测量值-垂直度标准值
41、其中,δ为垂直度测量误差。
42、进一步地,s80步骤中,通过以下公式对数据进行分析处理:
43、δ=平行度测量值-平行度标准值
44、其中,δ为平行度测量误差。
45、与现有技术相比,本申请具有以下有益效果:针对激光平直度测量仪的测量功能,采用在已知垂直度的两条导轨上,采集导轨上检测位置的水平方向和竖直方向的测量值,通过拟合得到的两条直线来计算垂直度和平行度,如此可满足客户的更高要求,也可以分别测量平行度和垂直度,功能更加全面。
技术特征:
1.基于激光测量仪的垂直度和平行度测量装置,其特征在于,包括:
2.根据权利要求1所述的基于激光测量仪的垂直度和平行度测量装置,其特征在于,所述第一导轨、所述第二导轨和所述第三导轨均安装于所述底座边缘处。
3.基于激光测量仪的垂直度和平行度测量方法,其特征在于,通过权利要求1或2所述的基于激光测量仪的垂直度和平行度测量装置进行测量,具体包括以下步骤:
4.根据权利要求3所述的基于激光测量仪的垂直度和平行度测量方法,其特征在于,s20步骤中,通过以下公式对数据进行分析处理,拟合一条直线l1:
5.根据权利要求3所述的基于激光测量仪的垂直度和平行度测量方法,其特征在于,s40步骤中,通过以下公式对数据进行分析处理,拟合一条直线l2:
6.根据权利要求3所述的基于激光测量仪的垂直度和平行度测量方法,其特征在于,s60步骤中,通过以下公式对数据进行分析处理,拟合一条直线l3:
7.根据权利要求3所述的基于激光测量仪的垂直度和平行度测量方法,其特征在于,s70步骤中,在测量垂直度时,通过以下公式对数据进行分析处理:
8.根据权利要求7所述的基于激光测量仪的垂直度和平行度测量方法,其特征在于,s70步骤中,垂直度测量值为3600(θ-90)″或3600*(θ-90)*tan(1″)μm/m;平行度测量值为3600α″或3600α*tan(1″)μm/m。
9.根据权利要求3-8任意一项所述的基于激光测量仪的垂直度和平行度测量方法,其特征在于,s80步骤中,通过以下公式对数据进行分析处理:
10.根据权利要求3-8任意一项所述的基于激光测量仪的垂直度和平行度测量方法,其特征在于,s80步骤中,通过以下公式对数据进行分析处理:
技术总结
本申请涉及基于激光测量仪的垂直度和平行度测量装置及其测量方法,该方案包括激光发射器,安装于微动台架顶部;底座,设于微动台架一侧;第一导轨,安装于底座顶部,并设有第一运动平台,该第一运动平台能够运动至第一导轨长度方向两端的第一检测位置和第二检测位置;第二导轨,安装于底座顶部,并设有第二运动平台,该第二运动平台能够运动至第二导轨长度方向两端的第三检测位置和第四检测位置;第三导轨,安装于底座顶部,并设有第三运动平台,该第三运动平台能够运动至第三导轨长度方向两端的第五检测位置和第六检测位置;接收器,可拆卸安装于第一运动平台、第二运动平台和第三运动平台上。本申请具有结构简单,使用方便的优点。
技术研发人员:陈宁,王瑛辉,朱进,郭钢祥,赵健铭,郭斌,仇跃鑫,陈元杰,程静,刘毛毛,成英淑,毛晓辉
受保护的技术使用者:浙江省计量科学研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!