一种线光斑弯曲度的测量方法与流程
本发明涉及线光斑测量,尤其涉及一种线光斑弯曲度的测量方法。
背景技术:
1、线光斑因公差装配组合问题会导致线光斑不一定是直的,在后端产品应用时,需要测量出线光斑的弯曲量。然而,传统单ccd近距离检测时,测量误差依赖图像校准精度,测试误差较大;远距离检测时受限于ccd的接收视场角度,无法检测到全部光斑,导致无法测量光斑的弯曲量。
2、因此,如何提供一种线光斑弯曲度的测量方法,以便于精准测量出线光斑的弯曲度成为亟待解决的技术问题。
技术实现思路
1、本发明要解决的技术问题在于如何提供一种线光斑弯曲度的测量方法,以便于精准测量出线光斑弯曲度。
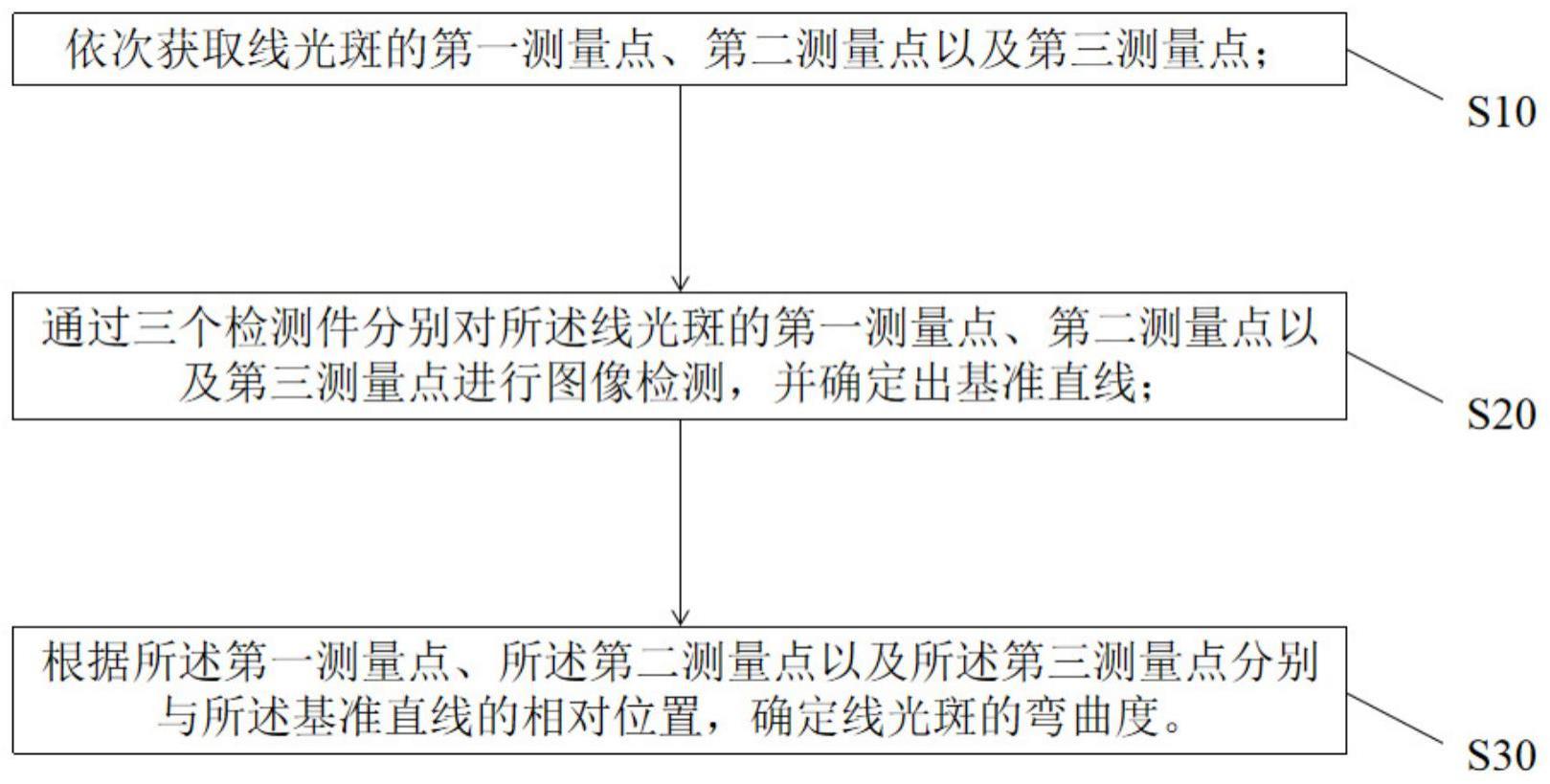
2、为此,根据第一方面,本发明实施例公开了一种线光斑弯曲度的测量方法,包括:依次获取线光斑的第一测量点、第二测量点以及第三测量点;
3、通过三个检测件分别对所述线光斑的第一测量点、第二测量点以及第三测量点进行图像检测,并确定出基准直线;
4、根据所述第一测量点、所述第二测量点以及所述第三测量点分别与所述基准直线的相对位置,确定线光斑的弯曲度。
5、本发明进一步设置为,所述第一测量点和所述第三测量点分别为光斑的两侧端点,所述第二测量点为光斑的中间顶点。
6、本发明进一步设置为,所述线光斑与其中一个所述检测件正对的位置为光斑中间,并根据光斑的发散角获得光斑长度,均分确定出光斑的两侧端点。
7、本发明进一步设置为,所述线光斑的弯曲度为光斑中间顶点至所述基准直线的距离。
8、本发明进一步设置为,所述线光斑为通过激光器产生呈一字型设置的出射光斑。
9、本发明进一步设置为,所述基准直线可以用户自定义。
10、本发明进一步设置为,所述基准直线为水平仪发出的水平光线。
11、本发明进一步设置为,三个所述检测件位于同一直线上,且该直线与所述基准直线平行。
12、本发明进一步设置为,所述检测件为ccd相机。
13、本发明进一步设置为,所述线光斑应用于扫地机器人的避障。
14、本发明具有以下有益效果:本发明实施例公开的一种线光斑弯曲度的测量方法,通过依次获取线光斑的第一测量点、第二测量点以及第三测量点;通过三个检测件分别对所述线光斑的第一测量点、第二测量点以及第三测量点进行图像检测,并确定出基准直线;根据所述第一测量点、所述第二测量点以及所述第三测量点分别与所述基准直线的相对位置,确定线光斑的弯曲度。与现有技术相比,便于精准测量出线光斑的弯曲度,避免了ccd相机畸变导致的误差,解决了ccd相机视场角过小导致光斑无法测量的技术问题。
技术特征:
1.一种线光斑弯曲度的测量方法,其特征在于,包括:
2.根据权利要求1所述的线光斑弯曲度的测量方法,其特征在于,所述第一测量点和所述第三测量点分别为光斑的两侧端点,所述第二测量点为光斑的中间顶点。
3.根据权利要求2所述的线光斑弯曲度的测量方法,其特征在于,所述线光斑与其中一个所述检测件正对的位置为光斑中间,并根据光斑的发散角获得光斑长度,均分确定出光斑的两侧端点。
4.根据权利要求1-3任意一项所述的线光斑弯曲度的测量方法,其特征在于,所述线光斑的弯曲度为光斑中间顶点至所述基准直线的距离。
5.根据权利要求1所述的线光斑弯曲度的测量方法,其特征在于,所述线光斑为通过激光器产生呈一字型设置的出射光斑。
6.根据权利要求1所述的线光斑弯曲度的测量方法,其特征在于,所述基准直线可以用户自定义。
7.根据权利要求1或6所述的线光斑弯曲度的测量方法,其特征在于,所述基准直线为水平仪发出的水平光线。
8.根据权利要求1所述的线光斑弯曲度的测量方法,其特征在于,三个所述检测件位于同一直线上,且该直线与所述基准直线平行。
9.根据权利要求1或8所述的线光斑弯曲度的测量方法,其特征在于,所述检测件为ccd相机。
10.根据权利要求1或5所述的线光斑弯曲度的测量方法,其特征在于,所述线光斑应用于扫地机器人的避障。
技术总结
本发明涉及线光斑测量技术领域,公开了一种线光斑弯曲度的测量方法,包括:依次获取线光斑的第一测量点、第二测量点以及第三测量点;通过三个检测件分别对所述线光斑的第一测量点、第二测量点以及第三测量点进行图像检测,并确定出基准直线;根据所述第一测量点、所述第二测量点以及所述第三测量点分别与所述基准直线的相对位置,确定线光斑的弯曲度。本发明便于精准测量出线光斑的弯曲度,避免了CCD相机畸变导致的误差,解决了CCD相机视场角过小导致光斑无法测量的技术问题。
技术研发人员:肖岩,李伟
受保护的技术使用者:深圳市柠檬光子科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!