一种用于无人机视觉定位的控制点粗差剔除方法与流程
本发明属于视觉自主定位,特别涉及一种基于控制点粗差剔除方法的无人机自主定位方法。
背景技术:
1、无人机具有经济性好、机动性强等特点,广泛应用于军事作战和民用任务中。无人机执行任务的前提是具备稳定、可靠的定位信息,当飞控系统无法接收或接收不可靠的位置信息时,无人机会无法正常工作。
2、目前,无人机定位系统广泛采用全球导航卫星系统(global navigationsatellite system,gnss)和惯性导航系统(inertial navigation system,ins)。城市环境下,建筑物遮挡会导致gnss信号较弱,无人机无法接收到持续可靠的定位数据;小型无人机因其载重和经济性的考虑,难以搭载高精度ins系统,另外,ins定位误差会随着工作时间的增大而累积,难以实现可靠的无人机自主定位。
3、无人机视觉自主定位系统因其经济性好、自主性强,近年来一直是无人机自主定位的研究热点。但视觉定位获取的控制点中常常存在与真实地理位置偏差较大的野值,导致视觉定位系统瞬时偏差较大,同样难以满足可靠的无人机定位需求。
技术实现思路
1、本发明的目的在于提供一种用于无人机视觉定位的控制点粗差剔除方法,以解决现有无人机视觉定位技术中获取的控制点偏差过大而带来的定位误差较大的问题。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种用于无人机视觉定位的控制点粗差剔除方法,包括以下步骤:
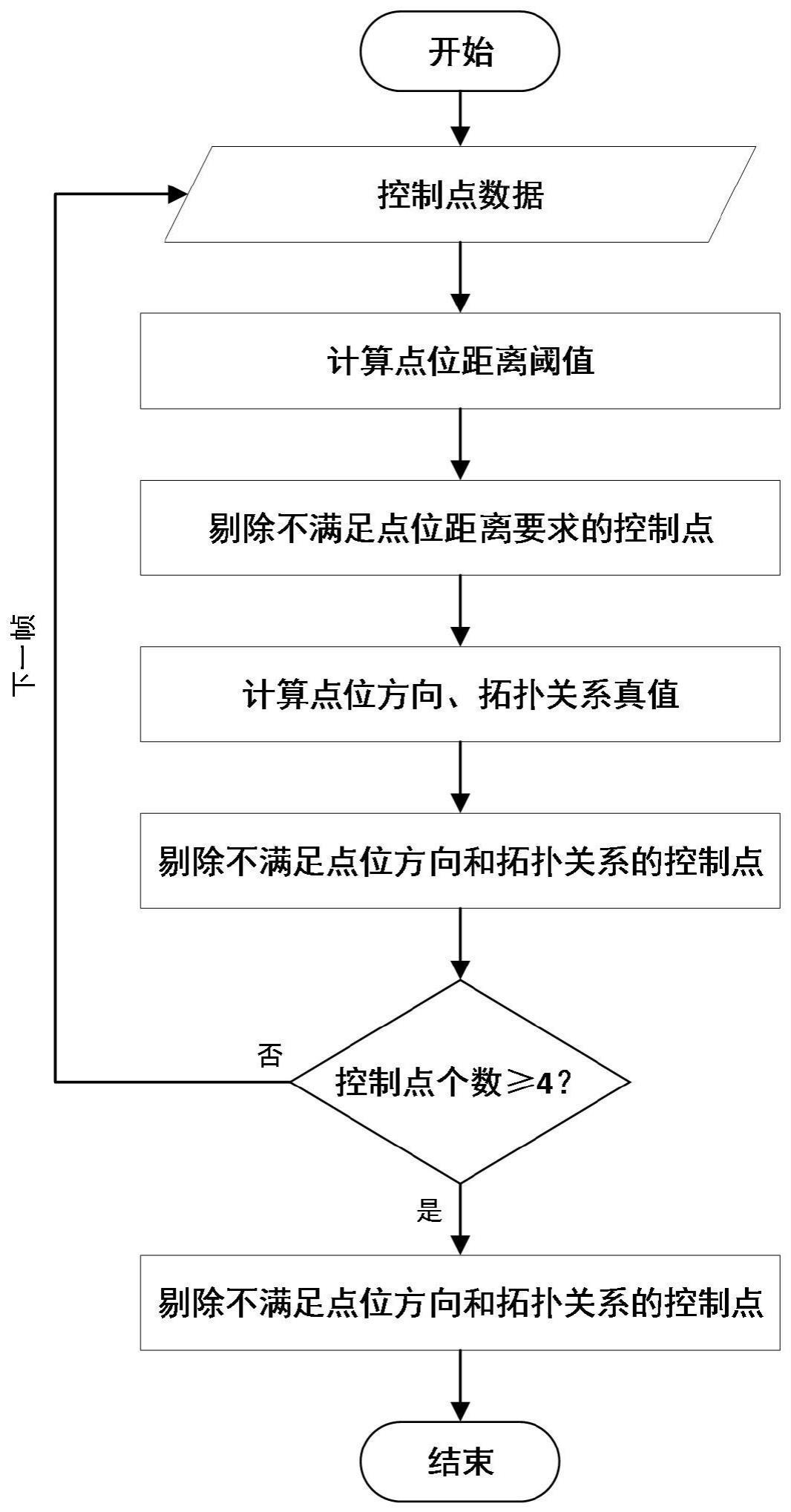
4、步骤1,根据无人机离地高度、焦距、像素个数以及像元尺寸数据计算当前帧航拍图像图幅大小,确定控制点间的点位距离阈值;
5、步骤2,根据控制点经纬度坐标,计算控制点间的点位距离,然后与点位距离阈值对比,剔除超过点位距离阈值的控制点;
6、步骤3,利用无人机飞控系统的惯性导航测量数据和控制点图像坐标数据,计算控制点间的点位方向和拓扑关系的真值数据,并设置控制点间的点位方向阈值;
7、步骤4,根据控制点的经纬度坐标计算控制点间的点位方向和拓扑关系,并分别对应与点位方向和拓扑关系的真值数据对比,剔除超过点位方向阈值的控制点及不满足地理拓扑关系的控制点;
8、步骤5,根据相机成像几何关系解算当前帧无人机位置,从而实现当前时刻的无人机自主定位。
9、进一步的,步骤1中控制点间的点位距离阈值的计算方式为:使用无人机离地高度h、航拍相机焦距f、图像像元尺寸ps和像素个数n,计算控制点间的点位距离阈值其中,rows为图像行数,cols为图像列数,σ为补偿系数。
10、进一步的,步骤4具体为:
11、使用相机内方位参数和无人机惯性导航测量姿态数据对当前帧航拍图像进行校正,将校正后的图像控制点按照地理方向分布,并利用控制点的图像坐标计算控制点间的点位方向yaw,剔除不满足|yaw-θ|<t2的控制点,并根据控制点的地理分布关系,剔除不满足地理拓扑关系的控制点;其中,θ为点位方向的真值数据,t2为点位方向阈值。
12、本发明与背景技术相比具有如下优点:
13、1.本发明提出的一种用于无人机视觉定位的控制点粗差剔除方法,采用根据当前帧图像成像分辨率估算的图幅大小作为控制点点位距离的阈值,剔除与当前场景偏差较大的控制点,确保参与无人机位置解算的控制点不存在野值。
14、2.本发明提出的一种用于无人机视觉定位的控制点粗差剔除方法,针对控制点拓扑关系约束条件,以控制点图像坐标计算的控制点间点位方向和拓扑信息为真值数据,可彻底消除控制点中存在地理坐标与实际拓扑关系不一致的情况,实现高可靠性的无人机视觉定位方案。
技术特征:
1.一种用于无人机视觉定位的控制点粗差剔除方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种用于无人机视觉定位的控制点粗差剔除方法,其特征在于,步骤1中控制点间的点位距离阈值的计算方式为:使用无人机离地高度h、航拍相机焦距f、图像像元尺寸ps和像素个数n,计算控制点间的点位距离阈值其中,rows为图像行数,cols为图像列数,σ为补偿系数。
3.根据权利要求1所述的一种用于无人机视觉定位的控制点粗差剔除方法,其特征在于,步骤4具体为:
技术总结
本发明公开了一种用于无人机视觉定位的控制点粗差剔除方法,属于视觉自主定位技术领域。采用控制点间的点位距离和方向约束条件剔除控制点野值,首先根据先验知识计算当前帧航拍图像图幅大小,确定控制点距离阈值;之后根据控制点经纬度坐标,计算控制点间的点位距离,并与点位距离阈值对比,剔除超过阈值的控制点;然后,计算控制点间的点位方向和拓扑关系的真值数据,并设置控制点间点位方向阈值。接着,计算控制点间的点位方向和拓扑关系,并与点位方向的真值数据对比,剔除超过点位方向阈值的控制点;最后,根据相机成像几何关系解算当前帧无人机位置。本发明相较于传统无人机视觉定位方法,可有效提高无人机视觉定位可靠性。
技术研发人员:孙方德,刘宇,王弢,王港,谢鑫浩,张晓男,王敏,常晓宇,朱进
受保护的技术使用者:中国电子科技集团公司第五十四研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!