一种应用于多激光雷达的耦合系统的耦合方法与流程
本发明涉及激光探测,尤其涉及一种应用于多激光雷达的耦合系统的耦合方法。
背景技术:
1、激光雷达是以发射激光光束来探测目标的位置、速度等特征量的雷达系统,其工作原理是先向目标发射探测激光束,然后将接收到的从目标反射回来的信号与发射信号进行比较,作适当处理后,就可获得目标的有关信息,例如目标距离、方位、高度、速度、姿态、甚至形状等参数。
2、由于激光雷达对环境感知的先天优势,使其成为自动驾驶技术对环境进行探测的主要传感器。现在市售的激光雷达主要有16线、32线、64线,其中线数越大,获取的点云数据越丰富。另外,激光雷达属于光、机、电一体产品,精度要求高、制造难度大,线数越大价格越高。低线数激光雷达相对成本低,但其获取的点云数据也少。
技术实现思路
1、本发明实施例中提供了一种多激光雷达的耦合平台及系统,既能获取丰富的点云数据量,又能减少成本。
2、为了解决上述技术问题,本发明实施例公开了如下技术方案:
3、第一方面,提供了一种多激光雷达的耦合平台,其中,包括至少2个用于安装激光雷达的底座,所述底座的顶面为安装面,所述安装面向同一方向倾斜且每一个所述安装面的倾斜角度不同。
4、优选的,包括n(n≥2)个所述底座,激光雷达的相邻出射光线之间的夹角为θ,任意选取一个所述安装面为基准面,所述基准面的倾斜角度为α,其余所述安装面的倾斜角度为(α+θ/n)、(α+2θ/n)、……、(α+(n-1)θ/n)。
5、优选的,包括n(n=2n,n≥1)个所述底座,激光雷达的相邻出射光线之间的夹角为θ,任意选取一个所述安装面为基准面,所述基准面的倾斜角度为α,其余所述安装面的倾斜角度为(α+θ/n)、(α+2θ/n)、……、(α+(n-1)θ/n)。
6、优选的,包括n个底座组,每个所述底座组内包括相邻的两个所述底座。
7、优选的,所述底座组的两个所述安装面倾斜角度之差为θ/2。
8、优选的,每一个所述安装面的中心位于同一高度。
9、优选的,所述底座位于同一直线上,任意两个相邻的所述底座之间距离相等。
10、优选的,所述安装面绕x轴旋转实现倾斜,x轴穿过所述安装面中心并垂直于激光雷达的出射光线主方向。
11、优选的,相邻的所述底座之间还设置有挡光板。
12、第二方面,提供了一种多激光雷达的耦合系统,包括多激光雷达的耦合平台,2个所述耦合平台相对设置,还包括设置于所述耦合平台之间的激光雷达,激光雷达的两端通过所述耦合平台的所述底座固定。
13、本发明公开了一种多激光雷达的耦合平台及系统,其耦合平台包括至少2个用于安装激光雷达的底座,底座的顶面为安装面,安装面向同一方向倾斜且每一个安装面的倾斜角度不同;使用过程中,两个耦合平台相对设置,激光雷达设置于耦合平台之间,激光雷达的两端通过耦合平台的底座固定。耦合平台使低线数的多个激光雷达耦合时,满足几何参数,激光雷达的出射光线均匀的插入到基准的激光雷达出射光线中,从而增加点云数据,实现与高线数激光雷达的扫描效果,降低成本。耦合系统将多个低线数激光雷达进行耦合,与单个激光雷达相比,能够增加点云数据,为后续数据处理提供丰富的数据源;实现甚至超越高线数激光雷达的使用效果,成本远低于使用高线数激光雷达。
技术特征:
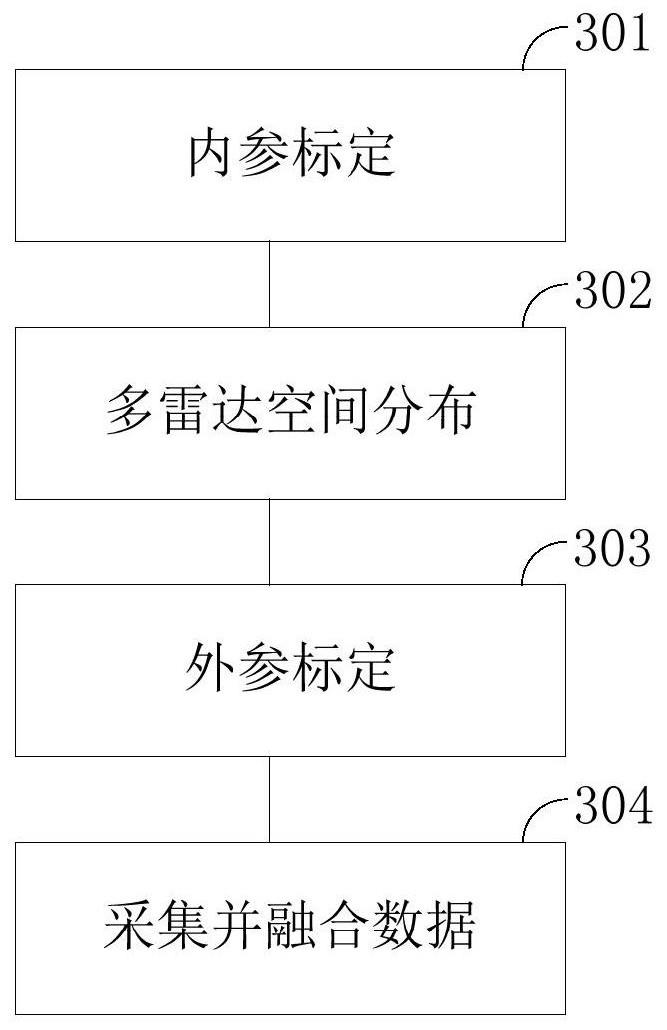
1.一种应用于多激光雷达的耦合系统的耦合方法,其中,所述耦合系统包括耦合平台和激光雷达,所述耦合平台包括n个用于安装所述激光雷达的底座,n大于等于2,所述底座的顶面为安装面,激光雷达的相邻出射光线之间的夹角为θ,任意选取一个所述安装面为基准面,所述基准面的倾斜角度为α,其余所述安装面的倾斜角度为(α+θ/n)、(α+2θ/n)、……、(α+(n-1)θ/n),所述激光雷达的两端通过所述耦合平台的所述底座固定,其特征在于,所述耦合方法包括下列步骤:
2.如权利要求1所述的应用于多激光雷达的耦合系统的耦合方法,其特征在于,所述内参标定包括校正所述激光雷达的测距d、俯仰角ψ和水平旋转角θ。
3.如权利要求1或2所述的应用于多激光雷达的耦合系统的耦合方法,其特征在于,所述外参标定包括:通过雷达空间分布的几何参数(dx,dy,dz,γ,β,α)确定多激光雷达间的旋转矩阵r3x3与平移矩阵t3x1。
4.如权利要求3所述的应用于多激光雷达的耦合系统的耦合方法,其特征在于,所述通过雷达空间分布的几何参数(dx,dy,dz,γ,β,α)确定多激光雷达间的旋转矩阵r3x3与平移矩阵t3x1,计算式如下:
5.如权利要求1或2所述的应用于多激光雷达的耦合系统的耦合方法,所述激光雷达的数量为2,2个激光雷达分别为第一雷达和第二雷达,所述第一雷达的坐标系为w,所述第一雷达获取的点云数据的坐标表示为(xw,yw,zw);所述第二雷达的坐标系为u,所述第二雷达获取的点云数据的坐标表示为(xu,yu,zu),其特征在于,所述采集并融合数据,将所述激光雷达的点云数据变换到同一坐标系包括:
技术总结
本发明公开了一种应用于多激光雷达的耦合系统的耦合方法,所述耦合方法包括下列步骤:内参标定;多雷达空间分布,使所述激光雷达保持一个基本的几何分布位置,其中,所述激光雷达间的几何参数包括在X、Y、Z轴方向上的偏移量d<subgt;x</subgt;,d<subgt;y</subgt;,d<subgt;z</subgt;,以及绕X、Y、Z轴的旋转角γ,β,α;外参标定;采集并融合数据,将所述激光雷达的点云数据变换到同一坐标系。上述耦合方法,将多个低线数激光雷达进行耦合,耦合平台使其满足几何参数,激光雷达的出射光线均匀的插入到基准的激光雷达的出射光线中,增加点云数据并进行点云数据融合。
技术研发人员:邱纯鑫,刘乐天
受保护的技术使用者:深圳市速腾聚创科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!