对目标设备精确测温方法、系统、巡检机器人和存储介质与流程
本发明涉及核电站检测,尤其涉及一种对目标设备精确测温方法、系统、巡检机器人和存储介质。
背景技术:
1、对高压变电设备由于故障引起的发热和升温,可利用红外热成像设备进行诊断,提供反映变电设备故障状态的热信息。对运行中高压变电设备热故障进行红外检测,具有不需停电、远距离、安全可靠、准确高效等常规测试技术不具有的优点,是实现在线监测和设备状态检修的最有效手段之一。
2、目前自动测温分析系统,在监测变电设备进行温度识别的过程中采用的都是矩形目标识别方式,这种测量方式,在简单背景的情况下,将矩形区域内最高温度计算认为是目标的温度的可以达到自动监测的目的。
3、但是,在复杂背景的情况下,这种标记方式就会导致得到错误的测温结果。因为若要将整个目标进行测量,而测量的矩形框偏大,导致矩形区域的最高温度实际来源是背景温度,而不是目标温度。同样情况下,如果将测量矩形标记的偏小,就会导致无准确反映设备的工作温度状态。
技术实现思路
1、本发明要解决的技术问题在于,针对现上述背景技术中提及的相关技术存在的至少一个缺陷:如何精确对目标进行温度测量,提供一种对目标设备精确测温方法、系统、巡检机器人和存储介质。
2、本发明解决其技术问题所采用的技术方案是:提供一种对目标设备精确测温方法,包括以下步骤:
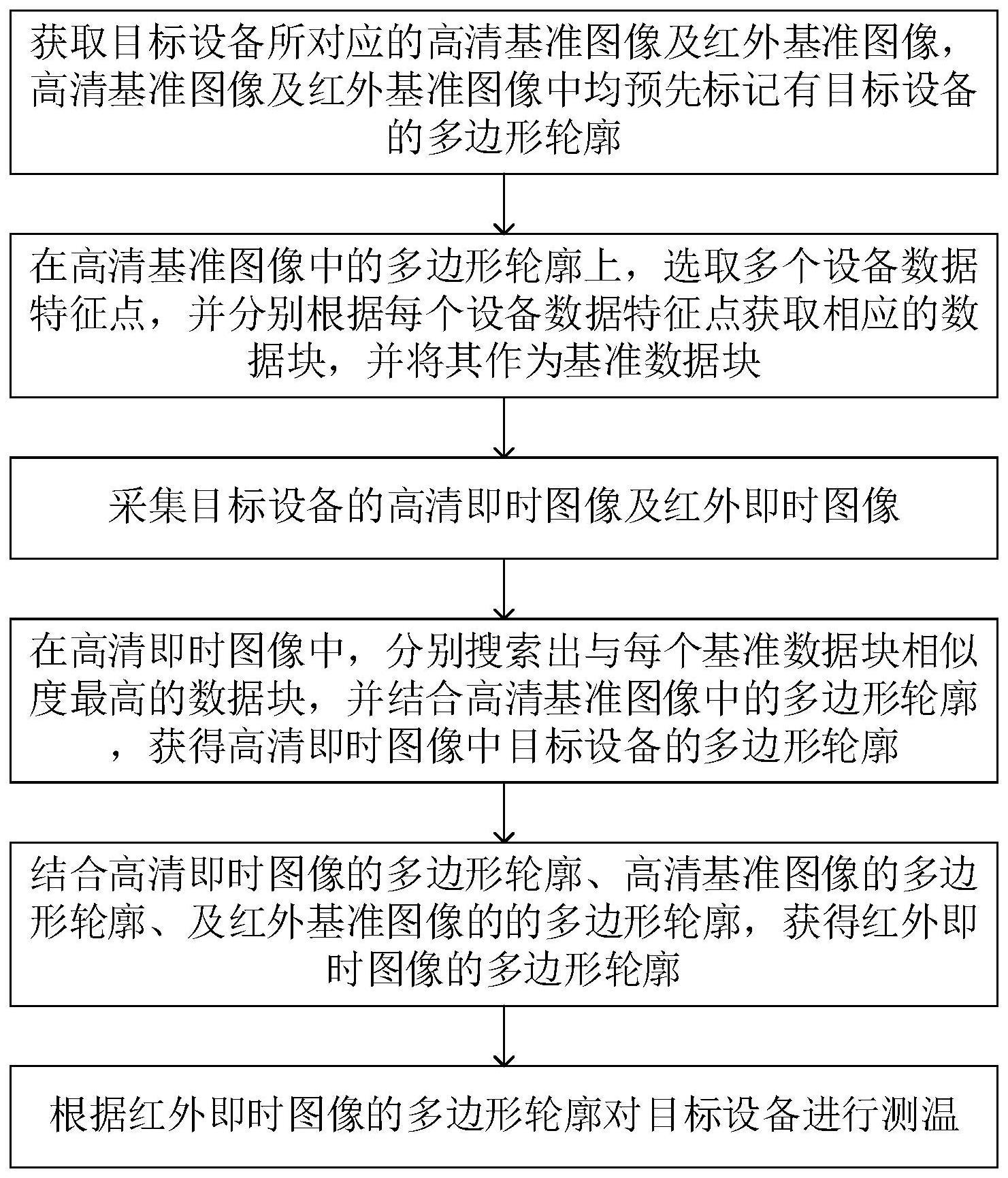
3、获取目标设备所对应的高清基准图像及红外基准图像,所述高清基准图像及所述红外基准图像中均预先标记有所述目标设备的多边形轮廓;
4、在所述高清基准图像中的所述多边形轮廓上,选取多个设备数据特征点,并分别根据每个设备数据特征点获取相应的数据块,并将其作为基准数据块;
5、采集目标设备的高清即时图像及红外即时图像;
6、在所述高清即时图像中,分别搜索出与每个基准数据块相似度最高的数据块,并结合所述高清基准图像中的多边形轮廓,获得所述高清即时图像中所述目标设备的多边形轮廓;
7、结合所述高清即时图像的多边形轮廓、所述高清基准图像的多边形轮廓、及所述红外基准图像的多边形轮廓,获得所述红外即时图像的多边形轮廓;
8、根据所述红外即时图像的多边形轮廓对所述目标设备进行测温。
9、优选地,所述高清基准图像及所述红外基准图像中均预先标记有所述目标设备的多边形轮廓,包括:
10、记录所述高清基准图像中所述目标设备的第一左上角位置的坐标和第一右下角位置的坐标,以及所述红外基准图像中所述目标设备的第二左上角位置的坐标和第二右下角位置的坐标;
11、结合所述第一左上角位置的坐标、所述第一右下角位置的坐标、所述第二左上角位置的坐标和所述第二右下角位置的坐标,采用多边形标记法,分别获得所述目标设备的所述高清基准图像的多边形轮廓和对应的所述红外基准图像的多边形轮廓。
12、优选地,所述多个设备数据特征点至少包括所述第一左上角位置的坐标点和所述第一右下角位置的坐标点。
13、优选地,所述结合所述高清即时图像的多边形轮廓、所述高清基准图像的多边形轮廓、及所述红外基准图像的多边形轮廓,获得所述红外即时图像的多边形轮廓,包括:
14、根据公式1和公式2计算出所述红外即时图像的多边形轮廓中各点坐标(cx,cy):
15、
16、
17、其中,所述第一左上角位置的坐标为(ccdx1,ccdy1),所述第一右下角位置的坐标为(ccdx2,ccdy2),所述第二左上角位置的坐标为(irx1,iry1),所述第二右下角位置的坐标为(irx2,iry2),所述高清基准图像各点坐标为(x,y)。
18、优选地,所述分别根据每个设备数据特征点获取相应的数据块,并将其作为基准数据块,包括:
19、分别以每个设备数据特征点为中心,在所述高清基准图像的多边形轮廓中选取长度和宽度相同的数据块作为所述基准数据块。
20、优选地,所述在所述高清即时图像中,分别搜索出与每个基准数据块相似度最高的数据块,包括:
21、根据公式3计算出相似度:
22、
23、分别统计所有的r(i,j)中的最大值,其数值的坐标(i,j)为与所述基准数据块相似度最高的对应的待处理数据块的坐标数据;
24、其中,r(i,j)表示为以(i,j)为中心的图像块sij在即时高清图数据与基准设备模板图像中的相识度值,sij表示为所述高清即时图像中坐标(i,j)为中心的长度和宽度相同为m的数据块数据,sij(m,n)表示sij该数据块中数据坐标为(m,n)的亮度数据,i的取值范围为(m/2)到(w-m/2),j的取值范围为(m/2)到(h-m/2),w表示所述高清基准图像的宽度,h表示所述高清基准图像的高度。
25、优选地,所述在所述高清即时图像中,分别搜索出与每个基准数据块相似度最高的数据块,之后还包括:
26、获得每个所述相似度最高的数据块对应的目标特征点,判断多个所述目标特征点之间的距离与相应的多个所述设备数据特征点之间的距离是否在预设值内,如判断是,则判断多个所述目标特征点与多个所述设备数据特征点相匹配。
27、本发明还构造了一种对目标设备精确测温系统,包括:
28、一个或多个处理器;
29、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述任一项所述的对目标设备精确测温方法。
30、本发明还构造了一种巡检机器人,包括:对目标设备精确测温系统、高清摄像头和红外热像仪。
31、本发明还构造了一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述的对目标设备精确测温方法。
32、本发明涉及对目标设备精确测温方法、系统、巡检机器人和存储介质,方法包括:根据带有目标设备的多边形轮廓的高清基准图像及红外基准图像,在高清基准图像中选取多个特征点并获得对应的基准数据块,采集目标设备的高清即时图像,在高清即时图像搜索与基准数据块相似度最高的数据块,结合高清基准图像中的多边形轮廓,获得高清即时图像中目标设备的多边形轮廓,结合高清即时图像的多边形轮廓、高清基准图像的多边形轮廓、及红外基准图像的多边形轮廓,获得红外即时图像的多边形轮廓,根据红外即时图像的多边形轮廓进行测温。通过实施本发明,精确框取具体的测温部件,使得在多设备复杂的画面中准确找到测温的部位,提高测温的准确性,使运维人员更清楚、直观的了解测温的具体设备的具体部件。
技术特征:
1.一种对目标设备精确测温方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的对目标设备精确测温方法,其特征在于,所述高清基准图像及所述红外基准图像中均预先标记有所述目标设备的多边形轮廓,包括:
3.根据权利要求2所述的对目标设备精确测温方法,其特征在于,所述多个设备数据特征点至少包括所述第一左上角位置的坐标点和所述第一右下角位置的坐标点。
4.根据权利要求2所述的对目标设备精确测温方法,其特征在于,所述结合所述高清即时图像的多边形轮廓、所述高清基准图像的多边形轮廓、及所述红外基准图像的多边形轮廓,获得所述红外即时图像的多边形轮廓,包括:
5.根据权利要求1所述的对目标设备精确测温方法,其特征在于,所述分别根据每个设备数据特征点获取相应的数据块,并将其作为基准数据块,包括:
6.根据权利要求5所述的对目标设备精确测温方法,其特征在于,所述在所述高清即时图像中,分别搜索出与每个基准数据块相似度最高的数据块,包括:
7.根据权利要求1所述的对目标设备精确测温方法,其特征在于,所述在所述高清即时图像中,分别搜索出与每个基准数据块相似度最高的数据块,之后还包括:
8.一种对目标设备精确测温系统,其特征在于,包括:
9.一种巡检机器人,其特征在于,包括:对目标设备精确测温系统、高清摄像头和红外热像仪。
10.一种存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7任一项所述的对目标设备精确测温方法。
技术总结
本发明涉及对目标设备精确测温方法、系统、巡检机器人和存储介质,方法包括:根据带有目标设备的多边形轮廓的高清基准图像及红外基准图像,在高清基准图像中选取多个特征点并获得对应的基准数据块,采集目标设备的高清即时图像,在高清即时图像搜索与基准数据块相似度最高的数据块,结合高清基准图像中的多边形轮廓,获得高清即时图像中目标设备的多边形轮廓,结合高清即时图像的多边形轮廓、高清基准图像的多边形轮廓、及红外基准图像的多边形轮廓,获得红外即时图像的多边形轮廓,根据红外即时图像的多边形轮廓进行测温。通过实施本发明,精确框取具体的测温部件,使得在多设备复杂的画面中准确找到测温的部位,提高测温的准确性。
技术研发人员:王远国,曹洋,卓廉程,胡春泉,陈永锋
受保护的技术使用者:岭东核电有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!