一种基于超分辨率测向的无人机目标跟踪方法和系统与流程
本发明属于目标跟踪,具体的,涉及一种基于超分辨率测向的无人机目标跟踪方法和系统。
背景技术:
1、随着无人机的快速发展,在军事和民用领域得到广泛应用,空间内传输的数据类型和数据量增加,对遥测空间谱网格站提出的任务越来越重,要求也越来越高,新的需求也在不断提出,无人机空间谱网格遥测接收系统作为无人机系统的重要组成部分,主要任务是实时接收、处理并显示无人机的飞行状态、任务载荷工作状态等遥测数据。无人机遥测接收系统的性能很大程度上决定了无人机系统的整体性能,是无人机与空间谱网格站之间联系的“神经中枢”纽带。
2、目前常见的目标跟踪系统包含大口径高分辨率摄像机、云台、伺服机构、距离传感器等关键部件,虽然具有较高定位精度,但极易受天气影响而丢失目标,且容易被云高度层遮挡,目标丢失后很难短时间内重新捕获目标。系统整机体积较大,结构复杂,不易于安装和维护。
技术实现思路
1、为了解决上述目标跟踪运算复杂度较高的问题,本发明提出一种基于超分辨率测向的无人机目标跟踪方法和系统。
2、根据本发明第一方面,本发明请求保护一种基于超分辨率测向的无人机目标跟踪方法,其特征在于,包括:
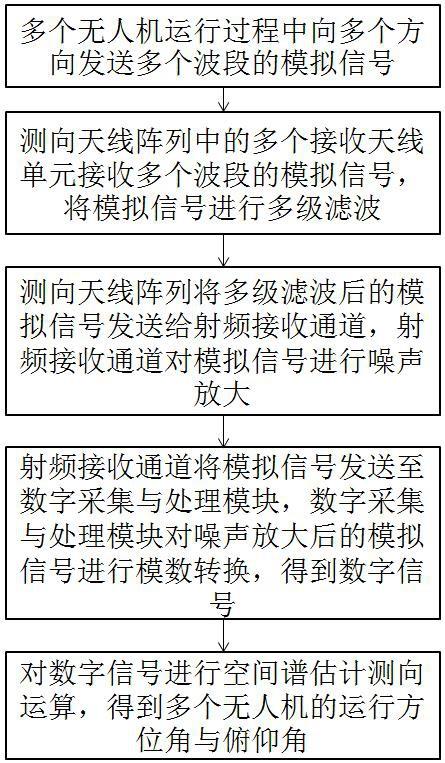
3、多个无人机运行过程中向多个方向发送多个波段的模拟信号;
4、测向天线阵列中的多个接收天线单元接收多个波段的模拟信号,将模拟信号进行多级滤波;
5、测向天线阵列将多级滤波后的模拟信号发送给射频接收通道,射频接收通道对模拟信号进行噪声放大;
6、射频接收通道将模拟信号发送至数字采集与处理模块,数字采集与处理模块对噪声放大后的模拟信号进行模数转换,得到数字信号;
7、对数字信号进行空间谱估计测向运算,得到多个无人机的运行方位角与俯仰角。
8、优选的,多个无人机运行过程中向多个方向发送多个波段的模拟信号,具体包括:
9、每个无人机搭载不同运行波段的信号发射器;
10、每个无人机在飞行过程中按照各自的发射周期向自身方位面360°空域发射各自的模拟信号;
11、模拟信号在预设空域范围内进行传播。
12、优选的,测向天线阵列中的多个接收天线单元接收多个波段的模拟信号,将模拟信号进行多级滤波,具体包括:
13、测向天线阵列由多个独立的接收天线单元组成;
14、每个接收天线单元按照预设圆的切线分布,接收天线单元之间的距离不同,依据距离设置多个阵元间距;
15、依据多个波段的模拟信号激活对应的接收天线单元;
16、采集得到模拟信号和无人机飞行信息;
17、根据无人机飞行信息,确定模拟信号所表征的无人机飞行状态;
18、使用子带树变换对模拟信号进行子带树分解,得到分解后的模拟信号;
19、根据模拟信号所表征的无人机飞行状态,将分解后的模拟信号进行子带树重构,得到重构的模拟信号;
20、将重构的模拟信号按照设计要求的单位和周期输出给控制系统,并更新姿态滤波窗口内的模拟信号。
21、优选的,测向天线阵列将多级滤波后的模拟信号发送给射频接收通道,射频接收通道对模拟信号进行噪声放大,具体包括:
22、第一放大,采用第一谐振网络接收模拟信号来放大模拟信号以提高噪声系数;
23、噪声放大,判断模拟信号是弱信号还是强信号,且采用第二谐振网络在模拟信号是弱信号的情况下以低噪声模式运行并接收第一谐振网络的输出作为第一输入以及具有通过可变电容连接至地的第二输入侧以进行高增益放大,从而输出第一阻抗信号;
24、去噪,采用去噪单元在模拟信号是强信号的情况下以低增益模式运行并接收、去噪和输出第一谐振网络的输出;以及
25、高低噪声放大,采用第三谐振网络接收在去噪中的输出作为第三输入并在低增益模式时通过第二可变电容接收模拟信号作为第四输入以进行低增益阻抗放大,从而输出第二阻抗信号。
26、优选的,射频接收通道将模拟信号发送至数字采集与处理模块,数字采集与处理模块对噪声放大后的模拟信号进行模数转换,得到数字信号,具体包括:
27、数字采集与处理模块包括多个fpga部件,多个fpga部件至少包括第一fpga部件和第二fpga部件;
28、每个周期末,获取多个第一fpga部件的第一输出值,以及第二fpga部件的第二输出值;
29、根据第一输出值和第二输出值,确定模拟信号是否转换完成;
30、若转换完成,则获取数模转换器中记录的第一数字码值,根据第一数字码值,确定模拟信号对应的数字信号。
31、优选的,对数字信号进行空间谱估计测向运算,得到多个无人机的运行方位角与俯仰角,具体包括:
32、对经过模数转换得出来的数字信号计算得到协方差矩阵,
33、依据数字信号选择对应的阵列流型网格,采用协方差矩阵的噪声子空间和阵列流型网格得到空间谱网格;
34、提取空间谱网格最大的k个峰描述子,最后对k个峰描述子进行grassmann空间插值,得到超分辨角度和极化信息。
35、优选的,依据多个波段的模拟信号激活对应的接收天线单元,具体包括:
36、多个接收天线单元至少包括第一接收天线单元、第二接收天线单元和第三接收天线单元;
37、多个波段的模拟信号至少包括第一波段模拟信号和第二波段模拟信号;
38、第一接收天线单元、第二接收天线单元和第三接收天线单元按照预设圆的切线分布,第一接收天线单元、第二接收天线单元之间距离为第一阵元间距,第二接收天线单元、第三接收天线单元之间距离为第二阵元间距;
39、当无人机的模拟信号为第一波段模拟信号时,激活第一接收天线单元和第二接收天线单元;
40、当无人机的模拟信号为第二波段模拟信号时,激活第二接收天线单元和第三接收天线单元。
41、优选的,方法还包括:
42、接收多个无人机通过多条链路发送的模拟信号;
43、分别对各条链路上的模拟信号进行第一次逆向纠错解码,确定第二标签的第二模拟信号,并根据第二标签判断第二模拟信号是否存在丢失现象;
44、若第二模拟信号存在丢失,则对第二模拟信号进行第二次逆向纠错解码,得到第一模拟信号,第一模拟信号括第一标签,第一次逆向纠错解码与第二次逆向纠错解码相对应;
45、若第一标签不存在丢失,则根据第一模拟信号确定待传输的模拟信号。
46、根据本发明第二方面,本发明还请求保护一种基于超分辨率测向的无人机目标跟踪系统,其特征在于,包括多个无人机、测向天线阵列、射频接收通道、数字采集与处理模块;
47、所述一种基于超分辨率测向的无人机目标跟踪系统用于执行所述的一种基于超分辨率测向的无人机目标跟踪方法。
48、本发明请求保护的一种基于超分辨率测向的无人机目标跟踪方法和系统,通过多无人机运行过程中发送多波段模拟信号,测向天线阵列中的接收天线单元接收后进行多级滤波,之后发送给射频接收通道进行噪声放大,之后发送至数字采集与处理模块进行模数转换,得到数字信号并进行空间谱估计测向运算,得到多个无人机的运行方位角与俯仰角。本发明无需伺服云台,系统体积小,重量轻接收天线采用了小型化设计;利用遥测频段微波链路进行目标跟踪。本发明的有益效果为:不易受环境影响,系统稳定可靠;目标跟踪稳定,即使目标丢失也可在短时间内快速重新捕获,系统可定制化设计,根据应用需求来进行指定距离、空域范围、目标数量等关键指标的功能性设计。
- 还没有人留言评论。精彩留言会获得点赞!