基于平面约束的半固态激光雷达的内参修正方法
本发明涉及雷达内参修正,尤其是涉及基于平面约束的半固态激光雷达的内参修正方法。
背景技术:
1、目前,激光雷达作为一种先进的三维感知传感器,是智能辅助驾驶、无人机、智慧城市、遥感技术等领域的热门研究方向。相比较传统二维图像相机与超声波雷达等探测手段,激光雷达具有探测范围广精度高、反馈信息丰富、抗干扰能力强等优点。根据扫描方式分类,激光雷达可分为机械式、半固态(mems,转镜式)、纯固态(opa、f l ash)。其中,转镜式半固态激光雷达的光学部分由棱镜、电机和发射器等构成。这种结构使其相交于其他种类拥有更好的耐热性和耐用性,更易通过各类规范标准测试,因而被广泛使用于无人驾驶,agv机器人,轨道交通检测等领域。
2、转镜式半固态激光雷达通过转镜旋转不断改变脉冲激光的发射方向,实现在目标方向有序的扫描。脉冲光束被目标方向的物体反射后又进一步被雷达的内置光电信号转换器接收,完成一个测量过程。这个信号发射与接收过程得到的数据只能反映雷达与目标物体之间的一维距离关系,需要结合雷达内部的光路结构参数才能获得完整的三维空间的相对位置关系。因此,内参的精度对于激光雷达三维感知的准确度具有极大影响。可在激光雷达的实际生产与组装中,转镜外形,激光发射器的位置与发射方向等结构内参往往因为各类因素与设计值存在偏差,这极大地限制了激光雷达在三维空间上的高精度感知测量。
技术实现思路
1、本发明的目的在于克服上述技术不足,提出基于平面约束的半固态激光雷达的内参修正方法,能够有效提升半固态激光雷达的内参精度,以提高激光雷达三维感知的准确度。
2、为达到上述技术目的,第一方面,本发明的技术方案提供一种基于平面约束的半固态激光雷达的内参修正方法,包括以下步骤:
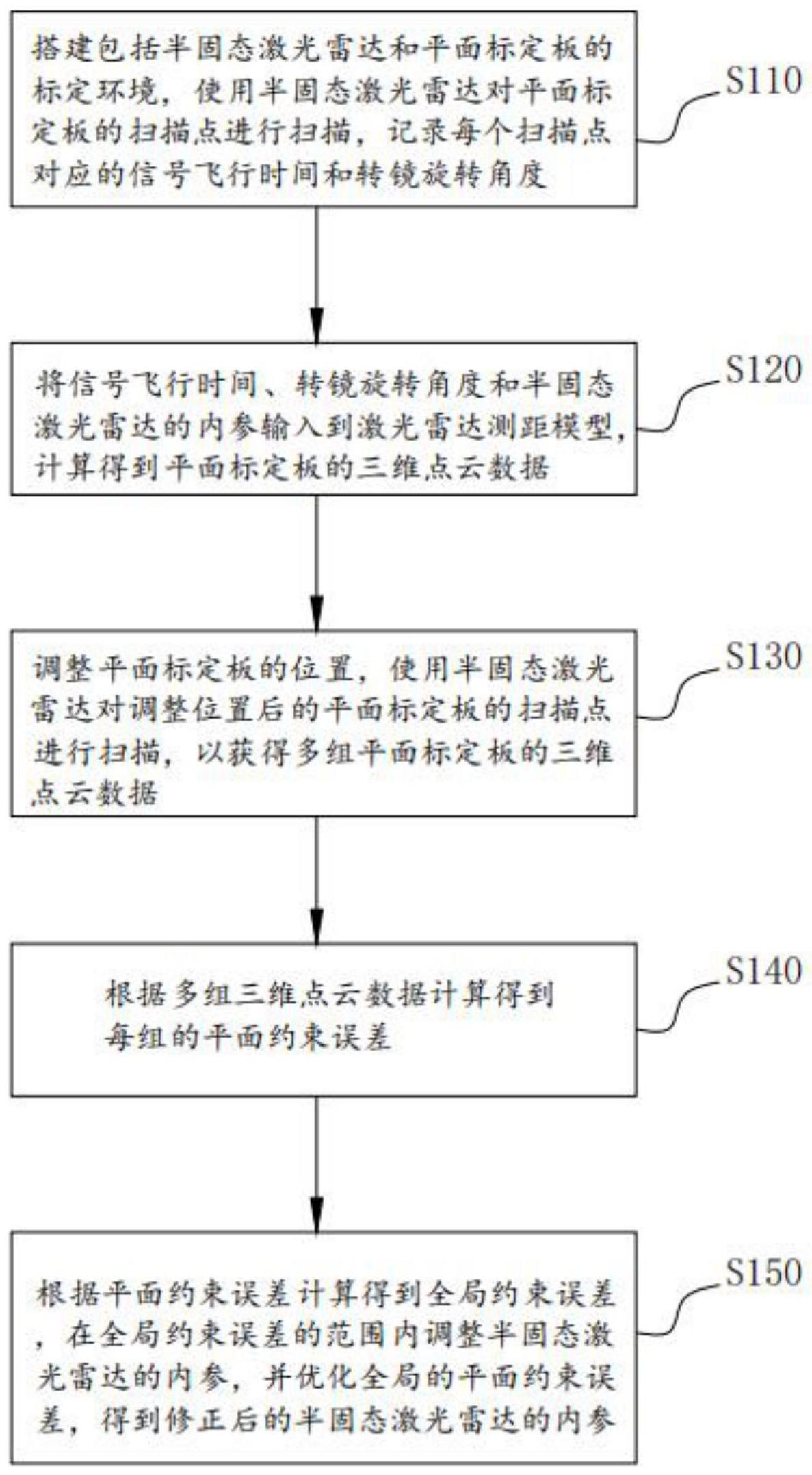
3、搭建包括半固态激光雷达和平面标定板的标定环境,使用所述半固态激光雷达对所述平面标定板的扫描点进行扫描,记录每个所述扫描点对应的信号飞行时间和转镜旋转角度;
4、将所述信号飞行时间、所述转镜旋转角度和所述半固态激光雷达的内参输入到激光雷达测距模型,计算得到所述平面标定板的三维点云数据;
5、调整所述平面标定板的位置,使用所述半固态激光雷达对调整位置后的所述平面标定板的扫描点进行扫描,以获得多组所述平面标定板的所述三维点云数据;
6、根据多组所述三维点云数据计算得到每组的平面约束误差;
7、根据所述平面约束误差计算得到全局约束误差,在所述全局约束误差的范围内调整所述半固态激光雷达的内参,并优化全局的所述平面约束误差,得到修正后的所述半固态激光雷达的内参。
8、与现有技术相比,本发明提供的基于平面约束的半固态激光雷达的内参修正方法的有益效果包括:
9、本发明的基于平面约束的半固态激光雷达的内参修正方法仅需要依赖平面约束板便可修正激光雷达的内部结构参数误差,通过多次调整所述平面标定板的位置,使用所述半固态激光雷达对调整位置后的所述平面标定板的扫描点进行扫描,以获得多组所述平面标定板的所述三维点云数据,再根据三维点云数据计算得到每组的平面约束误差,然后计算得到全局约束误差,在所述全局约束误差的范围内调整所述半固态激光雷达的内参,并优化全局的所述平面约束误差,得到修正后的所述半固态激光雷达的内参,从而提高半固态激光雷达在三维空间上的测量精度,对于高精度半固态激光雷达发展具有极大的意义。
10、根据本发明的一些实施例,所述半固态激光雷达的内参的包括:ρ,θ(rad):共同表示入射激光的方向;xl,yl,zl:激光发射器的三维坐标;β(rad):表示镜面倾角;d:表示镜面到原点的距离,其特征在于,计算得到所述平面标定板的三维点云数据,包括步骤:
11、根据所述转镜旋转角度与所述内参计算得到反射方向向量,所述反射方向向量用于表示激光由镜面反射后的方向向量;
12、根据所述转镜旋转角度与所述内参计算得到激光由发射器到镜面的距离信息与激光在镜面反射点的坐标信息,所述距离信息用于表示激光由发射器照射至转镜镜面的距离,所述坐标信息用于表示激光照射至镜面后发生反射的坐标;
13、根据所述信号飞行时间、所述反射方向向量、所述距离信息和所述坐标信息计算得到所述平面标定板的所述三维点云数据。
14、根据本发明的一些实施例,根据所述信号飞行时间、所述反射方向向量、所述距离信息和所述坐标信息计算得到所述平面标定板的所述三维点云数据,解析式如下:
15、
16、其中,λ为所述距离信息,即激光发射器到镜面的距离;为所述坐标信息,即激光在镜面反射点的坐标;为所述反射方向向量;c为光速;t为信号飞行时间。
17、根据本发明的一些实施例,根据多组所述三维点云数据计算得到每组的平面约束误差,解析式如下:
18、
19、根据本发明的一些实施例,根据所述平面约束误差计算得到全局约束误差,包括步骤:
20、将每组所述平面约束误差相加,得到所述全局约束误差。
21、根据本发明的一些实施例,修正后的所述半固态激光雷达的内参,解析式为:
22、ρ,θ,xl,yl,zl,β,d=argminerror
23、其中,error为所述全局约束误差,所述半固态激光雷达的内参包括:ρ,θ(rad):共同表示入射激光的方向;xl,yl,zl:表示激光发射器的位置坐标;β(rad):表示镜面倾角;d:表示镜面到原点的距离。
24、第二方面,本发明的技术方案提供一种基于平面约束的半固态激光雷达的内参修正系统,包括:
25、数据记录模块,用于记录半固态激光雷达对所述平面标定板扫描的每个所述扫描点对应的信号飞行时间和转镜旋转角度;
26、三维点云数据计算模块,用于将所述信号飞行时间、所述转镜旋转角度和所述半固态激光雷达的内参输入到激光雷达测距模型,计算得到所述平面标定板的三维点云数据,调整所述平面标定板的位置,使用所述半固态激光雷达对调整位置后的所述平面标定板的扫描点进行扫描,以获得多组所述平面标定板的所述三维点云数据;
27、平面约束误差计算模块,用于根据多组所述三维点云数据计算得到每组的平面约束误差;
28、内参修正模块,用于根据所述平面约束误差计算得到全局约束误差,在所述全局约束误差的范围内调整所述半固态激光雷达的内参,并优化全局的所述平面约束误差,得到修正后的所述半固态激光雷达的内参。
29、第三方面,本发明的技术方案提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如第一方面中任意一项所述的基于平面约束的半固态激光雷达的内参修正方法。
30、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于平面约束的半固态激光雷达的内参修正方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于平面约束的半固态激光雷达的内参修正方法,所述半固态激光雷达的内参的包括:ρ,θ(rad):共同表示入射激光的方向;xl,yl,zl:激光发射器的三维坐标;β(rad):表示镜面倾角;d:表示镜面到原点的距离,其特征在于,计算得到所述平面标定板的三维点云数据,包括步骤:
3.根据权利要求2所述的基于平面约束的半固态激光雷达的内参修正方法,其特征在于,根据所述信号飞行时间、所述反射方向向量、所述距离信息和所述坐标信息计算得到所述平面标定板的所述三维点云数据,解析式如下:
4.根据权利要求3所述的基于平面约束的半固态激光雷达的内参修正方法,其特征在于,根据多组所述三维点云数据计算得到每组的平面约束误差,解析式如下:
5.根据权利要求1所述的基于平面约束的半固态激光雷达的内参修正方法,其特征在于,根据所述平面约束误差计算得到全局约束误差,包括步骤:
6.根据权利要求1所述的基于平面约束的半固态激光雷达的内参修正方法,修正后的所述半固态激光雷达的内参,解析式为:
7.一种基于平面约束的半固态激光雷达的内参修正系统,其特征在于,包括:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如权利要求1至6任意一项所述的基于平面约束的半固态激光雷达的内参修正方法。
技术总结
本发明公开了基于平面约束的半固态激光雷达的内参修正方法,包括步骤:搭建包括半固态激光雷达和平面标定板的标定环境,使用半固态激光雷达对平面标定板的扫描点进行扫描,记录每个扫描点对应的信号飞行时间和转镜旋转角度;将信号飞行时间、转镜旋转角度和半固态激光雷达的内参输入到激光雷达测距模型,计算得到平面标定板的三维点云数据;调整平面标定板的位置,以获得多组平面标定板的三维点云数据;根据多组三维点云数据计算得到每组的平面约束误差;根据平面约束误差计算得到全局约束误差,在误差范围内调整激光雷达内参,得到修正后的半固态激光雷达的内参。本申请能够提升半固态激光雷达的内参精度,以提高激光雷达三维感知的准确度。
技术研发人员:李萌新,乔大勇,汪佳静
受保护的技术使用者:西北工业大学宁波研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!