一种目标检测方法、系统及存储介质与流程
本发明涉及目标检测,更具体地,涉及一种目标检测方法、系统及存储介质。
背景技术:
1、智能三电(电池、电机、电控)、智能座舱、自动驾驶已代表未来汽车的发展趋势。无人驾驶的软件系统一般会被定义为六大模块:感知、预测、高精度地图、定位、决策规划、控制。而感知模块功能通常指的是障碍物和交通灯识别,所用到的传感器,主要有激光雷达、毫米波雷达、摄像头。这三种传感器分别在不同环境下有不同的优势。
2、其中,摄像头成本低廉,具备目标检测和分类优势,被广泛应用于adas自动驾驶系统,但由于其对光线的变化敏感,并且依赖于深度学习网络模型和训练数据集,存在失效的可能。激光雷达做为主动传感器,具有精度高,三维感知能力强等优点,但其成本高昂,易受到天气的影响。毫米波雷达不仅成本相对较低,而且具备三维点云和速度感知能力,同时又能全天候工作,可靠性高,因此毫米波雷达被广泛应用于各个等级的adas自动驾驶系统中。
3、adas自动驾驶系统对感知系统提出了更高的要求,在地下车库中对行人目标进行追踪时,自动驾驶系统需要精准地感知到行人的位置及轨迹,方便决策模块和规划模块计算出合理的决策和路径,规避可能出现的安全风险。由于灯光较为昏暗导致视觉行人目标检测容易发生漏检误识别或者大幅度跳动等现象,视觉传感器在车库对人的目标的跟踪匹配不尽如人意。又如专利申请号为cn202010995314.5的中国发明专利公开了《一种基于毫米波雷达的短距人员目标跟踪方法》,该方案中所使用的kalman类毫米波雷达目标处理方法可以对目标进行常规跟踪的方案可以有效解决视觉目标跳动的问题,但是由于行人目标的移动轨迹的不稳定性,线性跟踪方法效果不佳。
技术实现思路
1、本发明为克服上述现有技术存在的问题,提供一种目标检测方法、系统及存储介质。
2、本发明的首要目的是为解决上述技术问题,本发明的技术方案如下:
3、本发明第一方面提供了一种目标检测方法,包括以下步骤:
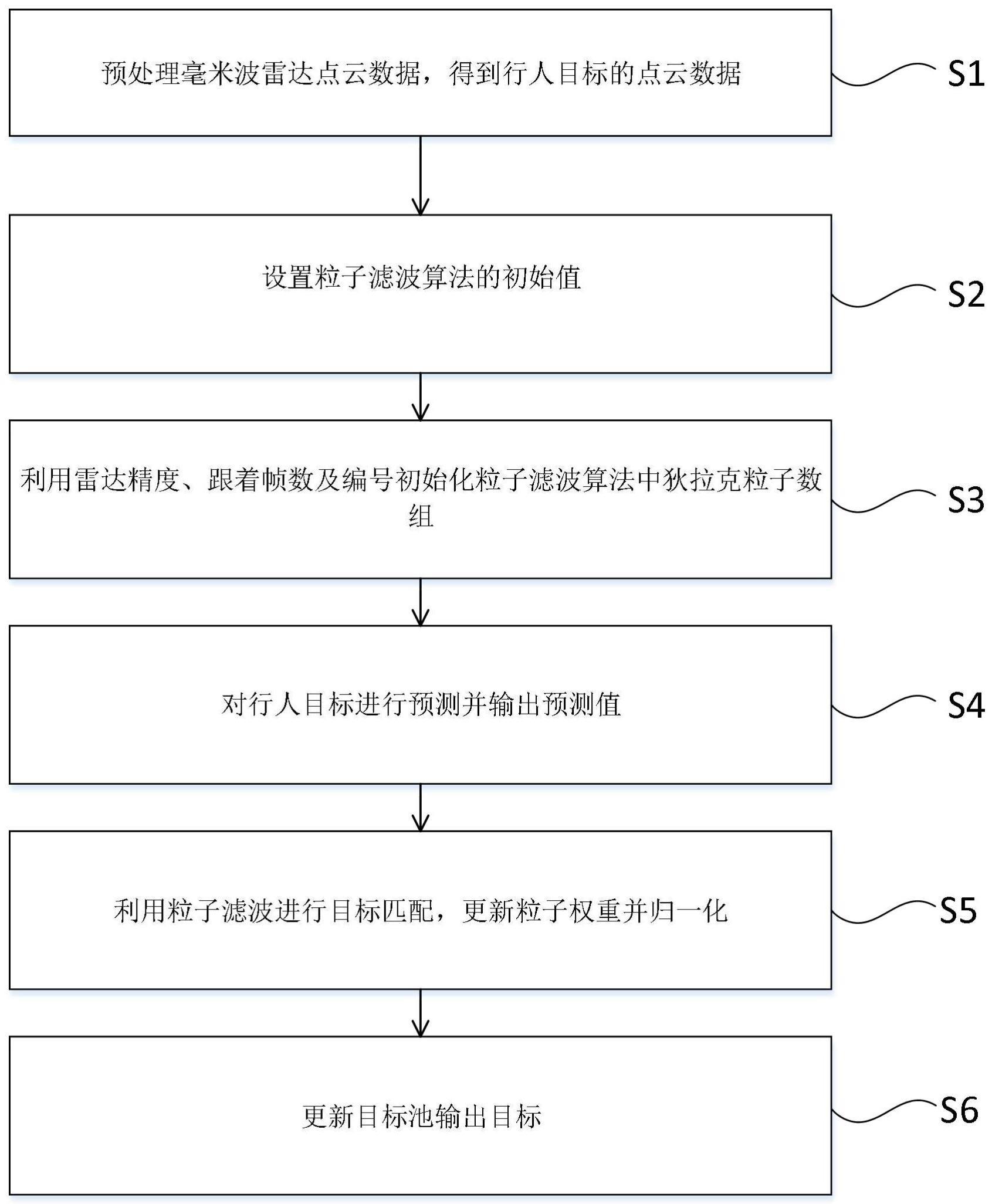
4、预处理毫米波雷达点云数据,得到行人目标的点云数据;
5、设置粒子滤波算法的初始值;
6、利用雷达精度、跟着帧数及编号初始化粒子滤波算法中狄拉克粒子数组;
7、对行人目标进行预测并输出预测值;
8、利用粒子滤波进行目标匹配,更新粒子权重并归一化;
9、更新目标池输出目标。
10、进一步的,所述预处理毫米波雷达点云数据具体为:
11、对毫米波雷达点云数据的首帧利用预设的第一门限进行过滤,剔除误识别点;
12、计算点云数据中每个点的位置及速度;
13、根据所述点的位置及速度对点云数据依次进行聚类、rcs人车区分、第二门限过滤得到行人目标的点云数据。
14、进一步的,所述设置粒子滤波算法的初始值具体为:将所述行人目标的跟踪帧数记作trackframe,trackframe置为设定值并对其进行编号,所述编号记为trackid,将所述行人目标存入目标池targetpool中作为粒子滤波算法的初值。
15、进一步的,所述利用雷达精度、跟着帧数及编号初始化粒子滤波算法中狄拉克粒子数组,具体为:
16、对每个所述跟踪帧数的编号trackid构建一个行数m、列数n为预设值的二维数组;
17、所述二维数组的首项分别为trackid、trackframe,所述二维数组中每格的距离记作dmdn,dmdn的值为雷达的距离精度。
18、进一步的,当所述trackid为1时,粒子权重初值为每项均是0.01。
19、进一步的,对行人目标进行预测并输出预测值,具体为:
20、设置点云中的点x方向、y方向的状态方程分别为:
21、xk+1=vx*帧间隔时间(frametime)+xk
22、yk+1=vy*帧间隔时间(frametime)+yk
23、其中,其中k为迭代的次数,其中k的值等于跟踪帧数trackframe,将更新后的目标记为predicttarget,trackid及其他属性沿用该初始的行人目标。
24、进一步的,利用粒子滤波进行目标匹配,更新粒子权重并归一化,具体为:
25、将预处理点云数据得到的行人目标作为新一轮的观测值;
26、将所述新一轮的观测值对应的新目标与目标池中的各目标计算欧氏距离,将欧式距离最小时对应的目标池中的目标作为第一新目标,
27、对所述第一新目标通过能量门限进行匹配验证后得到第二新目标;
28、利用第二新目标修改该目标trackid中的所述二维数组的粒子权重中,并将修改后的权重归一化。
29、进一步的,更新目标池输出目标,具体为:
30、利用更新后的粒子权重更新trackid目标位置且当跟踪帧数trackframe大于设置的门限trackframethresh时,输出目标。
31、本发明第二方面提供了一种目标检测系统,该系统包括:存储器、处理器,所述存储器中包括一种目标检测方法程序,所述一种目标检测方法程序被所述处理器执行时实现如下步骤:
32、预处理毫米波雷达点云数据,得到行人目标的点云数据;
33、设置粒子滤波算法的初始值;
34、利用雷达精度、跟着帧数及编号初始化粒子滤波算法中狄拉克粒子数组;
35、对行人目标进行预测并输出预测值;
36、利用粒子滤波进行目标匹配,更新粒子权重并归一化;
37、更新目标池输出目标。
38、本发明第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质中包括目标检测方法程序,所述目标检测方法程序被处理器执行时,实现所述的一种目标检测方法的步骤。
39、与现有技术相比,本发明技术方案的有益效果是:
40、本发明基于粒子滤波算法,利用雷达精度、跟着帧数及编号初始化狄拉克粒子数组,再通过预测迭代更新粒子数组中的权重,有效减小了粒子滤波算法粒子生成随机性对行人目标探测的不确定性,使得对行人的状态检测不再依赖于线性的行为预测,解决了在光线不足的情况下视觉目标跳动的问题和毫米波雷达在较为密闭的空间内杂波过多导致误识别或者漏识别的问题,能够明显提高对行人目标的识别精度,从而提高行车的安全性。
技术特征:
1.一种目标检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种目标检测方法,其特征在于,所述预处理毫米波雷达点云数据具体为:
3.根据权利要求1所述的一种目标检测方法,其特征在于,所述设置粒子滤波算法的初始值具体为:将所述行人目标的跟踪帧数记作trackframe,trackframe置为设定值并对其进行编号,所述编号记为trackid,将所述行人目标存入目标池targetpool中作为粒子滤波算法的初值。
4.根据权利要求3所述的一种目标检测方法,其特征在于,所述利用雷达精度、跟着帧数及编号初始化粒子滤波算法中狄拉克粒子数组,具体为:
5.根据权利要求3所述的一种目标检测方法,其特征在于,当所述trackid为1时,粒子权重初值为每项均是0.01。
6.根据权利要求3所述的一种目标检测方法,其特征在于,对行人目标进行预测并输出预测值,具体为:
7.根据权利要求6所述的一种目标检测方法,其特征在于,利用粒子滤波进行目标匹配,更新粒子权重并归一化,具体为:
8.根据权利要求3所述的一种目标检测方法,其特征在于,更新目标池输出目标,具体为:
9.一种目标检测系统,其特征在于,该系统包括:存储器、处理器,所述存储器中包括一种目标检测方法程序,所述一种目标检测方法程序被所述处理器执行时实现如下步骤:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中包括目标检测方法程序,所述目标检测方法程序被处理器执行时,实现如权利要求1至8中任一项所述的一种目标检测方法的步骤。
技术总结
本发明公开了一种目标检测方法、系统及存储介质,方法包括:预处理毫米波雷达点云数据,得到行人目标的点云数据;设置粒子滤波算法的初始值;利用雷达精度、跟着帧数及编号初始化粒子滤波算法中狄拉克粒子数组;对行人目标进行预测并输出预测值;利用粒子滤波进行目标匹配,更新粒子权重并归一化;更新目标池输出目标。本发明解决了在光线不足的情况下视觉目标跳动的问题和毫米波雷达在较为密闭的空间内杂波过多导致误识别或者漏识别的问题,能够明显提高对行人目标的识别精度,从而提高行车的安全性。
技术研发人员:伍倬,任凡,陈重华,陈剑斌,张博
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!