一种基于无人机低空遥感影像的开裂盐碱土电导率测量方法
本发明属于遥感测量领域,具体涉及一种基于无人机低空遥感影像的开裂盐碱土电导率测量方法。
背景技术:
1、快速准确地测量土壤含盐量及其分布对于优化土壤管理措施、促进合理利用和改善土壤状况、保证粮食安全和改进生态环境等方面均具有非常重要的实际意义。土壤的电导率是以数字的形式表征土壤溶液的导电能力,即土壤传导电流的能力。土壤电导率通常被视为是土壤含盐量的精确量化指标,也是土壤盐碱化的国际评价标准之一。这是因为当土壤湿度保持恒定时,盐分矿物被认为是土壤中的强电解质,土壤溶液中各种溶解盐类是以离子状态存在的,他们都具有导电能力,盐分矿物含量的增加会提高土壤溶液的渗透压,进而引起电导率值的增加。因此,可以利用电导率直接反映土壤的含盐量水平。
2、目前,土壤电导率的测量主要分为接触式和非接触式两种主要类型。其中,接触式的土壤电导率测量方法主要依靠电极式传感器实现,这种方法需要将电压表、电极、恒流电源和土壤构成回路实现对电导率的测量。然而,电极法需要通过在土壤中挖坑或打孔,才能将用于测量的盐分传感器或电极埋入不同深度的土层中,且测量过程中必须保证仪器探头与土壤接触良好。这种方法通常费时费力,而且受土壤含水量、气象条件的影响也较大,仪器的使用难度也较高,很容易引起操作误差。非接触式电导率的测量主要通过大地电导仪实现,这种仪器是以电磁场理论为依据,通过测量和确定原生及次生磁场的相对关系实现对土壤电导率值的获取。然而,在实际应用中,仪器本身造价昂贵,较大的体积也不便于携带和操作。此外,大地电导仪的电导率测量结果精度容易受到土壤质地、土壤水分、土壤温度等土壤物理特性等诸多因素的影响,还会受到空气温度和压强等测量环境的干扰。同时,大地电导仪的电导率测量结果往往是对一定深度土壤剖面含盐量状况的总体表征,对于常用的土壤表层含盐量状况的敏感性很差。
技术实现思路
1、基于以上不足之处,本发明提供一种基于无人机低空遥感影像的开裂盐碱土电导率测量方法,解决了现有的土壤电导率传统实验室测量滞后性的缺点,以及电导法测量土壤电导率容易受环境因素和测量人为因素干扰的局限性的缺点,实现利用无人机低空遥感影像数据对盐碱化土壤电导率的精确测量。
2、本发明所采用的技术如下:一种基于无人机低空遥感影像的开裂盐碱土电导率测量方法,步骤如下:
3、步骤1、无人机遥感影像获取
4、采用的设备包括多旋翼的无人机、手持gps和1m×1m内径的矩形金属定标框,无人机安装有高清的ccd镜头和高光谱成像光谱仪,选取矩形研究区域分成四个子区域进行土壤表面无人机ccd高清遥感影像的拍摄及高光谱遥感影像的拍摄,并选取采样点进行土壤样本的采集,测量每个土壤样本的电导率真实值,并将所有电导率测量结果保存为电导率数据集e,作为整个研究区域的土壤电导率预测模型的建模样本集;
5、步骤2、无人机遥感影像的预处理
6、对四个矩形子区域拍摄的ccd高清遥感影像进行图像镶嵌、几何校正及裁剪,生成整个矩形研究区所对应的矩形ccd高清遥感影像图z1;对四个矩形子区域拍摄的高光谱遥感影像进行图像镶嵌、几何校正及裁剪,生成整个矩形研究区所对应的矩形高光谱遥感影像图z2;
7、步骤3、提取光谱特征参数
8、根据采样点的位置信息,查找采样点全波段高光谱反射率数据,在此基础上计算样本点的特征光谱波段,并进一步计算特征波段光谱反射率数据的一阶导数、二阶导数、对数、倒数和平方根数学变换参数作为光谱特征参数,形成土壤样本点的光谱反射率特征参数数据集;步骤4、提取土壤表面特征参数
9、根据采样点的位置信息,根据比例尺确定1m×1m地表区域对应的图像像元行列数,以每个样本点作为中心,根据地表区域尺寸确定土壤样本表面的图像尺寸,根据该尺寸对所有样本点数据进行裁剪,对裁剪结果图像进行灰度化处理,并根据处理的灰度图像计算256灰度级,步长为1的0°、45°、90°、135°四个方向的灰度共生矩阵,根据灰度共生矩阵提取对比度,角二阶矩,一致性,能量四个统计纹理特征参数合成为研究区内所有土壤样本点的裂纹特征参数数据集;
10、步骤5、建立电导率预测模型
11、利用计算机matlab软件的神经网络工具箱,以所有样本点的光谱特征参数数据集t和所有样本点的纹理特征参数数据集作为自变量,以所有样本点作为训练样本,对训练样本实测的电导率数据作为因变量,建立基于无人机遥感影像数据的盐碱化土壤电导率神经网络预测模型;
12、步骤6、对土壤电导率进行大面积遥感反演
13、根据土壤样本点采样区域对应的行列数确定一滑动窗口,对覆盖整个测量区域的无人机遥感影像进行卷积计算,提取滑动每个窗口内中心像元作为预测样本,将所有预测样本的光谱特征参数数据集和纹理特征参数数据集带入神经网络预测模型,实现对苏打盐碱化土壤含盐量的无人机遥感测量。
14、进一步的,步骤1具体如下:
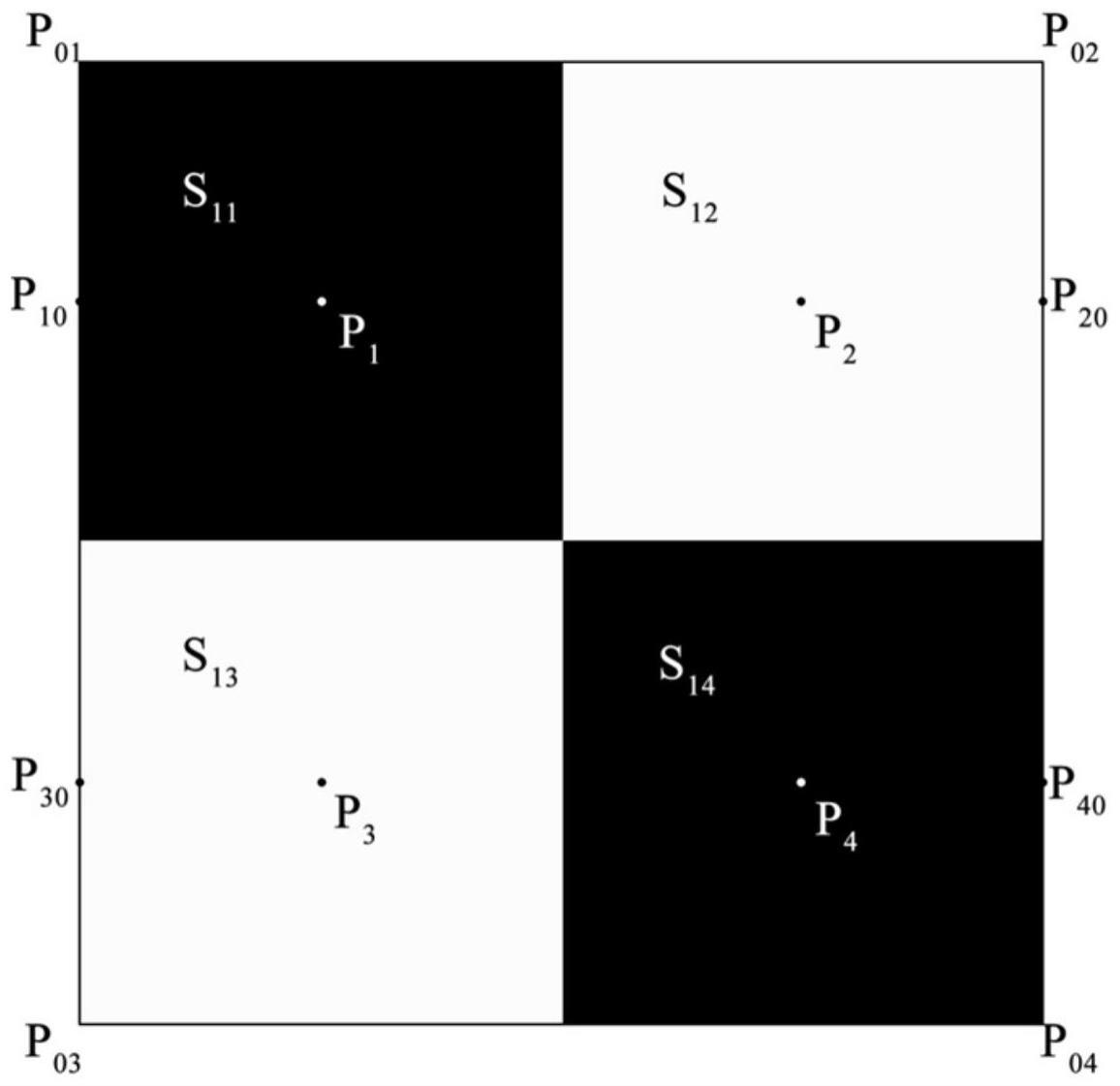
15、采用的设备包括多旋翼的无人机、手持gps和1m×1m内径的矩形金属定标框,无人机安装有高清的ccd镜头和高光谱成像光谱仪,首先,使用在线地图平台确定一个待测量盐碱土电导率的矩形研究区域s0,根据在线地图平台提取矩形研究区域s0的四个顶点p01、p02、p03、p04的经纬度位置,以及矩形研究区域s0的实际边长l,然后将整个矩形研究区域s0均匀划分成4个同等大小的矩形子区域,以及每个矩形子区域的边长l1,其中l1=0.5l,同时按照行列分布,确定4个矩形子区域s11、s12、s13和s14,将每一个子区域作为ccd镜头覆盖圆形区域的内切正方形,计算出圆形区域的半径同时根据ccd镜头的垂直拍摄视场角a,计算无人机的固定航拍高度根据四个顶点p01、p02、p03和p04的经纬度位置以及每个矩形子区域的边界,确定飞行高度h,其中,无人机起飞点为位置点p10,该位置点为矩形子区域s11左侧边界中间位置点,位置点p20为矩形子区域s12右侧边界中间位置点,位置点p30为矩形子区域s13左侧边界中间位置点,位置点p40为矩形子区域s14右侧边界中间位置点即飞行终点;同时以位置点p10→p20→p30→p40的顺序作为无人机飞行路线标记点,控制无人机按照飞行路线标记点的飞行路径覆盖整个矩形研究区域s0,进行土壤表面无人机ccd高清遥感影像的拍摄及高光谱遥感影像的拍摄;由于ccd镜头拍摄时,镜头覆盖范围为矩形子区域的外接圆,因此能够保证每次拍摄时ccd高清无人机遥感影像的区域与下一次的拍照区域均有重合,在每个矩形子区域s11、s12、s13和s14的中心点即作为采样点p1、p2、p3和p4,在矩形子区域s11与矩形子区域s12的重合区域设置四个采样点p11、p12、p21和p22;在矩形子区域s12与矩形子区域s14的重合区域设置四个采样点p23、p24、p41和p42;在矩形子区域s14与矩形子区域s13的重合区域设置四个采样点p43、p44、p31和p32;以及矩形子区域s13与矩形子区域s11的重合区域设置四个采样点p33、p34、p13和p14,对每个重合区域的采样点记录经纬度位置,并且在每个采样点处放置矩形金属定标框,用于后续的无人机ccd高清遥感影像和高光谱遥感影像的几何校正及拼接;最后,在无人机飞行完毕后,在矩形子区域中心点以及重合区域的采样点处进行土壤样本的采集,将采集完毕的土壤样本进行实验室烘干后,配置水土质量比为5:1的悬浊液,然后在实验室测量每个土壤样本的电导率真实值,并将所有电导率测量结果保存为电导率数据集e,作为整个矩形研究区域的土壤电导率预测模型的建模样本集。
16、进一步的,步骤2具体如下:
17、步骤2.1、对无人机在固定高度h获取的四个矩形子区域的ccd高清遥感影像进行图像镶嵌、几何校正及裁剪的操作:对矩形子区域s11与矩形子区域s12拍摄的ccd高清遥感影像i1和i2进行拼接生成拼接结果i1,然后将拼接结果i1与矩形子区域s14拍摄的ccd高清遥感影像i3进行拼接生成拼接结果i2,然后将拼接结果i2与矩形子区域s13拍摄的ccd高清遥感影像i4进行拼接生成拼接结果i3,最后将拼接结果i3再次与ccd高清遥感影像i1进行拼接验证,如果无重影现象,证明拼接结果i3精度高,能够作为最终的矩形研究区域s0所对应的整幅ccd高清遥感影像;
18、对拼接结果i3进行几何校正,利用在矩形研究区域s0的四个顶点处位置点p01、p02、p03和p04的gps经纬度实测数据,以及每个矩形子区域s11、s12、s13和s14的中心点p1、p2、p3和p4的gps经纬度实测数据,对拼接结果i3上的对应位置点进行基于多项式的几何校正,从而实现对整个矩形研究区域s0的所有像元点进行几何畸变校正,生成校正后的遥感影像i4;最后,在arcgis软件中,根据整个矩形研究区域s0的四个顶点生成矢量矩形边界roi,将矢量矩形边界roi与遥感影像i4进行重叠,保留矢量矩形边界roi内部的所有像元点,实现对遥感影像i4的裁剪,最终生成整个矩形研究区s0所对应的矩形ccd高清遥感影像图z1;
19、步骤2.2、对无人机在固定高度获取的四个矩形子区域的高光谱遥感影像进行图像镶嵌、几何校正及裁剪的操作:对矩形子区域s11和s12测量的高光谱遥感影像p1和p2进行拼接生成拼接结果q1,然后将拼接结果q1与矩形子区域s14测量的高光谱遥感影像p3进行拼接生成拼接结果q2,然后将拼接结果q2与矩形子区域s13测量的高光谱遥感影像p4进行拼接生成拼接结果q3,最后将拼接结果q3再次与拼接结果q1进行拼接验证,如果拼接结果q3与拼接结果q1无重影现象,证明拼接结果q3精度高,能够作为最终的矩形研究区域s0所对应的整幅高光谱分辨率遥感影像;第二,对拼接结果q3进行几何校正,利用在矩形研究区域s0的四个顶点处位置点p01、p0、p03和p04的gps经纬度实测数据,以及每个矩形子区域的中心点p1、p2、p3和p4的gps经纬度实测数据,对拼接结果q3上的对应位置点进行基于多项式的几何校正,从而实现对整个矩形研究区域s0的遥感影像上的所有像元点进行几何畸变校正,生成校正后的遥感影像q4;最后,在arcgis软件中,根据整个矩形研究区域s0的四个顶点生成矢量矩形边界roi,将矢量矩形边界roi与遥感影像q4进行重叠,保留矢量矩形边界roi内部的所有像元点,实现对遥感影像q4遥感影像的裁剪,最终生成整个矩形研究区域s0所对应的矩形高光谱遥感影像图z2;
20、进一步的,步骤3具体如下:
21、针对20个采样点p1、p2、p3、p4、p11、p12、p13、p14、p21、p22、p23、p24、p31、p32、p33、p34、p41、p42、p43和p44,计算20个采样点的电导率测量值与这些采样点在每一个波段的反射率值的相关系数,绘制20个采样点在所有波段上的相关系数曲线,根据相关系数曲线选取反射率与电导率相关性最高的5个波段作为特征光谱波段,特征光谱波段对应的波长分别为λ1、λ2、λ3、λ4和λ5;然后,提取每个采样点在特征光谱波段λ1、λ2、λ3、λ4和λ5处的反射率并保存为反射率的数据集t1,计算每个采样点在特征光谱波段λ1、λ2、λ3、λ4和λ5处的反射率的一阶导数并保存为反射率一阶导数的数据集t2;计算每个采样点在特征光谱波段λ1、λ2、λ3、λ4和λ5处的反射率的二阶导数并保存为反射率二阶导数的数据集t3;计算每个采样点在特征光谱波段λ1、λ2、λ3、λ4和λ5处的反射率的对数并保存为反射率对数的数据集t4;计算每个采样点在特征光谱波段λ1、λ2、λ3、λ4和λ5处的反射率的倒数并保存为反射率倒数的数据集t5;计算每个采样点在特征光谱波段λ1、λ2、λ3、λ4和λ5处的反射率的平方根并保存为反射率平方根的数据集t6;将数据集t1、t2、t3、t4、t5和t6合成为矩形研究区域s0所有土壤样本点的光谱反射率特征参数数据集t;
22、进一步的,步骤4具体如下:
23、根据矩形研究区域s0左边界两个顶点p01、p03位置的纬度w1、w3,以及整个矩形研究区域s0所对应的影像图z1的行号h,计算每个像元对应的实际尺寸同时计算矩形金属定标框中1m×1m内径所对应的矩形图像区域边长像元个数然后针对20个采样点p1、p2、p3、p4、p11、p12、p13、p14、p21、p22、p23、p24、p31、p32、p33、p34、p41、p42、p43和p44为中心,对应在影像图z1上提取并裁剪20个矩形ccd高清遥感子图像b1、b2、b3、b4、b11、b12、b13、b14、b21、b22、b23、b24、b31、b32、b33、b34、b41、b42、b43和b44,对裁剪结果图像进行灰度化处理,并根据处理的灰度图像计算256灰度级,计算每个采样点对应的矩形ccd高清遥感子图像在步长为1的0°、45°、90°和135°上的灰度共生矩阵m1、m2、m3和m4,在每个方向上计算所有样本点对应的矩形ccd高清遥感子图像的四方向平均对比度纹理特征量并保存为数据集c1、四方向平均能量值纹理特征量并保存为数据集c2、四方向平均熵值纹理特征量并保存为数据集c3、四方向平均一致性纹理特征量并保存为数据集c4;将数据集c1、c2、c3和c4合成为研究区内所有土壤样本点的裂纹特征参数数据集c;
24、进一步的,步骤5具体如下:
25、利用matlab软件的神经网络工具箱,以及所有样本点的光谱反射率特征参数数据集t和裂纹特征参数数据集c,将数据集t中的各类光谱反射率特征参数数据集进行标准化处理,生成标准化的光谱反射率特征参数数据集t’,将数据集c中的各类土壤裂纹特征参数数据集进行标准化处理,生成标准化的裂纹特征参数数据集c’,实现土壤电导率预测模型的建立;以所有的20个采样点作为训练样本,将训练样本的标准化光谱反射率特征参数数据集t’和标准化裂纹特征参数数据集c’作为自变量,将土壤电导率测量数据集e作为因变量,建立人工神经网络预测模型,设置神经网络迭代次数k1=100、误差阈值k2=0.4和初始学习率k3=0.2,并在此基础上建立土壤电导率的神经网络预测模型,模型形式为e=f(t′,c′);进一步的,步骤6具体如下:
26、根据训练样本点,即采样点矩形金属定标框中1m×1m内径所对应的矩形图像区域边长像元个数u1,建立一个矩形滑动窗口,矩形滑动窗口的边长即为u1;然后,分别从影像图z2和影像图z1的左上角第一个像元开始,将滑动窗口覆盖影像图z1和影像图z2,并逐项元进行遍历整个影像图z1和影像图z2;
27、对于影像图z2,每滑动一个像元,按照步骤3,分别提取滑动窗口内中心像元点在光谱波段λ1、λ2、λ3、λ4、λ5处的反射率t1,计算滑动窗口内中心像元点在特征光谱波段λ1、λ2、λ3、λ4、λ5处的反射率的一阶导数t2;计算滑动窗口内中心像元点在特征光谱波段λ1、λ2、λ3、λ4、λ5处的反射率的二阶导数t3;计算滑动窗口内中心像元点在特征光谱波段λ1、λ2、λ3、λ4、λ5处的反射率的对数t4;计算滑动窗口内中心像元点在特征光谱波段λ1、λ2、λ3、λ4、λ5处的反射率的倒数t5;计算滑动窗口内中心像元点在特征光谱波段λ1、λ2、λ3、λ4、λ5处的反射率的平方根t6,将反射率t1、一阶导数t2、二阶导数t3、对数t4、倒数t5和平方根t6组合为该窗口内中心像元的反射率特征参数数据集t(i1,j1),其中,i1为当前滑动窗口中心像元在影像图z2中的行号,j1为当前滑动窗口中心像元在影像图z2中的列号;
28、对于影像图z1,每滑动一个像元,按照步骤4,分别提取滑动窗口中心像元四方向平均对比度纹理特征量c1,提取滑动窗口中心像元四方向平均能量值纹理特征量c2,提取滑动窗口中心像元四方向平均熵值纹理特征量c3,提取滑动窗口中心像元四方向平均一致性纹理特征量c4,将对比度纹理特征量c1、能量值纹理特征量c2、熵值纹理特征量c3和一致性纹理特征量c4组合为该窗口内中心像元的裂纹特征参数数据集c(i2,j2),其中,i2为当前滑动窗口中心像元在影像图z1中的行号,j2为当前滑动窗口中心像元在影像图z1中的列号;
29、将反射率特征参数数据集t(i1,j1)=t’和裂纹特征参数数据集c(i2,j2)=c’带入人工神经网络预测模型e=f(t′,c′)中,计算该滑动窗口中心像元的电导率预测值;然后利用该方法遍历整个影像图z1和影像图z2,最终实现对矩形研究区域s0内所有像元内土壤电导率值的遥感测量。
30、本发明突出的有益效果及优点:与传统的实验室电导率测量和野外田间利用大地电导仪的电导率测量相比,本发明涉及的方法成本低、造价低廉、损耗小、可以实现对较大面积土壤电导率的实时、同步观测,同时具有机动性强的特点。本发明可以客观反映盐分矿物在土壤表面析出的状况,根据盐分矿物的诊断光谱波段提取的光谱特征参数受土壤盐分的直接影响,因此预测模型的参数关系明确,具有很高的测量精度。
- 还没有人留言评论。精彩留言会获得点赞!