惯性测量装置的温度补偿方法、装置、设备及存储介质与流程
本发明涉及惯性测量装置技术,尤其涉及一种惯性测量装置的温度补偿方法、装置、设备及存储介质。
背景技术:
1、惯性测量装置是惯导系统的核心组件之一,它的性能直接影响着导航系统的精度。目前导航系统广泛的应用在航空,航天,航海等各个领域中,为适应复杂的应用环境,一般要求惯导系统具有较宽的工作温度范围以及较好的性能稳定性。温度的影响是惯性测量装置误差的主要来源之一,因此,减小温度影响对进一步提高导航系统精度具有重要意义。
2、由于惯性测量装置中陀螺,加速度计以及其他器件的特性受温度影响,会导致a)器件级的陀螺和加速度计的零偏和标度误差等;b)系统级的安装误差等。为减小温度影响常用的方法有:a)在设计时选用温度系数较小的材料和结构;b)使用温度控制电路,采用内隔热外传导的方式将惯性敏感元件的温度保持在某一点,减少环境温度的影响;c)分析惯性测量装置的温度特性,建立惯性测量装置随温度变化的数学模型,并进行温度补偿。其中温控方法功耗大,体积大,启动慢等缺点,无法满足快速启动低功耗的应用要求。温度补偿方法具有成本低,无需增加温控装置且启动快速的优点。目前温度补偿技术已广泛应用于各类惯性测量装置,是保证惯性测量装置具有较宽工作温度范围的重要手段。
3、现有技术中存在的问题是惯性测量装置在全温范围内的性能稳定性和一致性不高,无法满足使用要求。目前主流采用温控方案,虽然提高了全温特性,但存在功耗高、启动慢的缺点,影响系统使用。也有些采用温补方案,但仅针对器件级的加速度计和陀螺,对部分参数进行了补偿,对于系统使用中需要用到的安装误差等参数无法进行补偿。
4、因此,如何提高惯性测量装置温度补偿精度,是目前亟需解决的技术问题。
技术实现思路
1、本发明主要目的在于提供一种惯性测量装置的温度补偿方法、装置、设备及存储介质,通过器件级和系统级温度补偿,不仅对陀螺和加速度计的零偏和标度因数进行精确补偿,还对器件级温补无法涉及到的安装误差和安装导致零偏和标度因数误差未达到技术要求的参数进行补偿。通过增加系统级温补,显著提高了系统的参数稳定性和测量精度。
2、第一方面,本技术提供了一种惯性测量装置的温度补偿方法,该方法包括步骤:
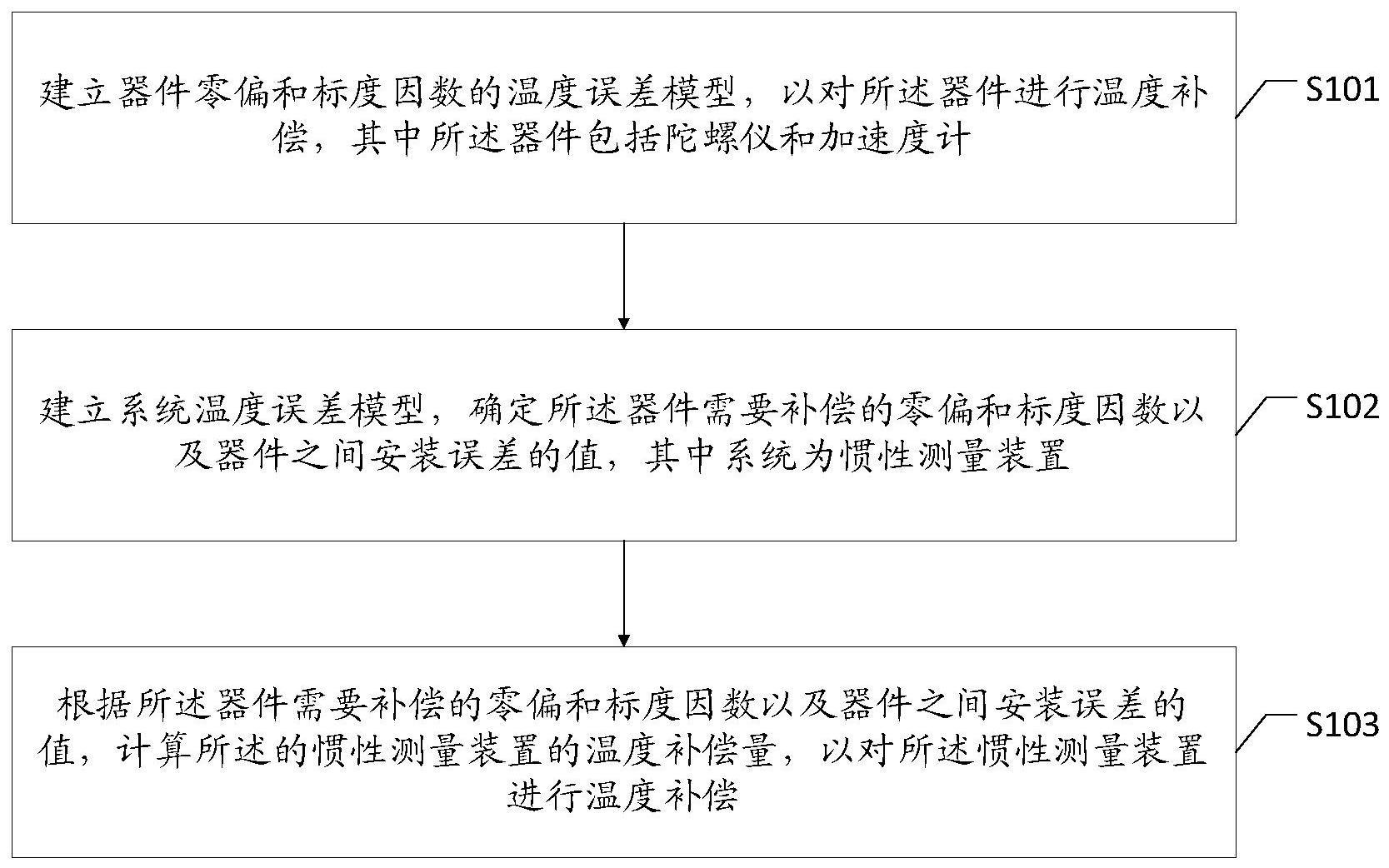
3、建立器件零偏和标度因数的温度误差模型,以对所述器件进行温度补偿,其中所述器件包括陀螺仪和加速度计;
4、建立系统温度误差模型,确定所述器件需要补偿的零偏和标度因数以及器件之间安装误差的值,其中系统为惯性测量装置;
5、根据所述器件需要补偿的零偏和标度因数以及器件之间安装误差的值,计算所述的惯性测量装置的温度补偿量,以对所述惯性测量装置进行温度补偿。
6、结合上述第一方面,作为一种可选的实现方式,对陀螺零偏的温度误差进行建模,得到陀螺零偏温度误差模型,其中所述陀螺零偏的温度误差模型为:其中d00为常数项,d0t为温度误差系数,t为陀螺温度,为陀螺零偏温度变化率误差系数,为陀螺温度变化率,ε为随机误差;
7、对陀螺标度因数的温度误差进行建模,得到陀螺标度因数的温度误差模型,其中所述陀螺标度因数的温度误差模型为:e10+其中e10为常数项,e1ti为陀螺标度因数的温度误差系数,ti为陀螺温度,n为误差模型的阶数;
8、对加速度计零偏的温度误差进行建模,得到加速度计零偏温度误差模型,其中所述加速度计零偏的温度误差模型为:k01t2+k02t+k03,其中k01、k02和k03为加速度计零偏的温度误差系数;
9、对加速度计标度因数的温度误差进行建模,得到加速度计标度因数的温度误差模型,其中所述加速度计标度因数的温度误差模型为:k11t2+k12t+k13,其中k11、k12和k13为加速度计标度因数的温度误差系数。
10、结合上述第一方面,作为一种可选的实现方式,获取陀螺和加速度计的温度值以及设定的基准的温度值;
11、将所述陀螺和加速度计的温度值以及设定的基准的温度值输入至所述器件零偏和标度因数的温度误差模型中,得到陀螺和加速度计的零偏和标度因数的补偿量;
12、建立器件的测量模型,并将陀螺和加速度计的零偏和标度因数的补偿量输入所述器件的测量模型中,确定器件的温度补偿量。
13、结合上述第一方面,作为一种可选的实现方式,根据系统的温度误差模型,计算器件的零偏和标度因数以及器件之间安装误差的补偿量;
14、建立系统的测量模型,并将计算器件的零偏和标度因数以及器件之间安装误差的补偿量输入到系统的测量模型,计算得到惯性测量装置的温度补偿量。
15、结合上述第一方面,作为一种可选的实现方式,所述系统的测量模型包括:陀螺的测量模型和加速度计的测量模型;
16、其中,所述陀螺的测量模型为:
17、
18、
19、其中,wx,wy和wz为陀螺的三轴输出,ωxm,ωym,ωzm为惯组测量坐标系中三轴的角速度分量;exy,exz,eyx,eyz,ezx,ezy为相对惯组测量坐标系的安装误差角;dox,doy,doz为陀螺零偏;e1x,e1y,e1z为陀螺标度因数;nwx,nwy,nwz为陀螺输出脉冲数;
20、其中,所述加速度计的测量模型为:
21、
22、
23、其中,ax,ay和az为加速度计的三轴输出axm,aym,azm为惯组测量坐标系中三轴的视加速度分量;exy,exz,eyz为加速度计安装误差角;k0x,k0y,k0z为加速度计零偏;k1x,k1y,k1z为加速度计标度因数;k2x,k2y,k2z为加速度计二次项误差系数;nax,nay,naz为加速度计输出脉冲数。
24、结合上述第一方面,作为一种可选的实现方式,将实时采集陀螺和加速度计的温度和设定基准温度值输入零偏温度误差模型,得到器件零偏的补偿量;
25、将实时采集陀螺和加速度计的温度和设定基准温度值输入标度因数误差模型,得到器件标度因数的补偿量。
26、结合上述第一方面,作为一种可选的实现方式,对器件和/或系统进行温度变化调制试验,得到器件输出和/或系统输出的随温度变化数据,并利用最小二乘回归,得到器件和/或系统温度误差模型中的各阶温度系数。
27、第二方面,本技术提供了一种惯性测量装置的温度补偿装置,该装置包括:
28、建立模块,其用于建立器件零偏和标度因数的温度误差模型,以对所述器件进行温度补偿,其中所述器件包括陀螺仪和加速度计;
29、确定模块,其用于建立系统温度误差模型,确定所述器件需要补偿的零偏和标度因数以及器件之间安装误差的值,其中系统为惯性测量装置;
30、计算模块,其用于根据所述器件需要补偿的零偏和标度因数以及器件之间安装误差的值,计算所述的惯性测量装置的温度补偿量,以对所述惯性测量装置进行温度补偿。
31、第三方面,本技术还提供了一种电子设备,所述电子设备包括:处理器;存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时,实现第一方面任一项所述的方法。
32、第四方面,本技术还提供了一种计算机可读存储介质,其存储有计算机程序指令,当所述计算机程序指令被计算机执行时,使计算机执行第一方面任一项所述的方法。
33、本技术提供的一种惯性测量装置的温度补偿方法、装置、设备及存储介质,其中该方法包括步骤:建立器件零偏和标度因数的温度误差模型,以对所述器件进行温度补偿,其中所述器件包括陀螺仪和加速度计;建立系统温度误差模型,确定所述器件需要补偿的零偏和标度因数以及器件之间安装误差的值,其中系统为惯性测量装置;根据所述器件需要补偿的零偏和标度因数以及器件之间安装误差的值,计算所述的惯性测量装置的温度补偿量,以对所述惯性测量装置进行温度补偿。本技术通过器件级和系统级温度补偿,不仅对陀螺和加速度计的零偏和标度因数进行精确补偿,还对器件级温补无法涉及到的安装误差和安装导致零偏和标度因数误差未达到技术要求的参数进行补偿。通过增加系统级温补,显著提高了系统的参数稳定性和测量精度。
34、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!