一种机动车超重检测方法、装置、设备、系统及存储介质与流程
本发明属于车辆检测,具体涉及一种机动车超重检测方法、装置、设备、系统及存储介质。
背景技术:
1、随着经济社会的快速发展,交通运输的种类方式也越来越多样化,现代化的交通运输方式主要有铁路运输、公路运输、水路运输和航空运输,其中,公路运输由于其适应强的优点始终是交通运输中重要的组成部分。
2、在实际的公路运输中,由于每日在公路上行驶的汽车数量较多,会使得公路持续性较差,需要经常进行维护保养,特别是一些超重车辆在公路上行驶时,会对路面造成巨大的损伤,尤其是当超重车辆在经过一些桥梁路面时,轻者会造成桥体的内部损伤,重者甚至会导致桥梁垮塌,进而导致重大的经济损失和人员伤亡事件,因此有必要对公路上的行驶车辆进行定点称重检测,以便及时发现超重车辆。
3、目前的机动车超重检测方案只是通过定点布置的地面称重设备来采集机动车重量,使得有些机动车会通过走s型路线来达成该地面称重设备测量失误的目的,从而规避超重处罚,因此如何提供一种机动车超重检测新方案来防止机动车通过走s型路线达成称重作弊目的,是本领域技术人员亟需研究的课题。
技术实现思路
1、本发明的目的是提供一种机动车超重检测方法、装置、系统、计算机设备及计算机可读存储介质,用以解决现有机动车超重检测方案无法防止机动车通过走s型路线达成称重作弊目的的问题。
2、为了实现上述目的,本发明采用以下技术方案:
3、第一方面,提供了一种机动车超重检测方法,包括:
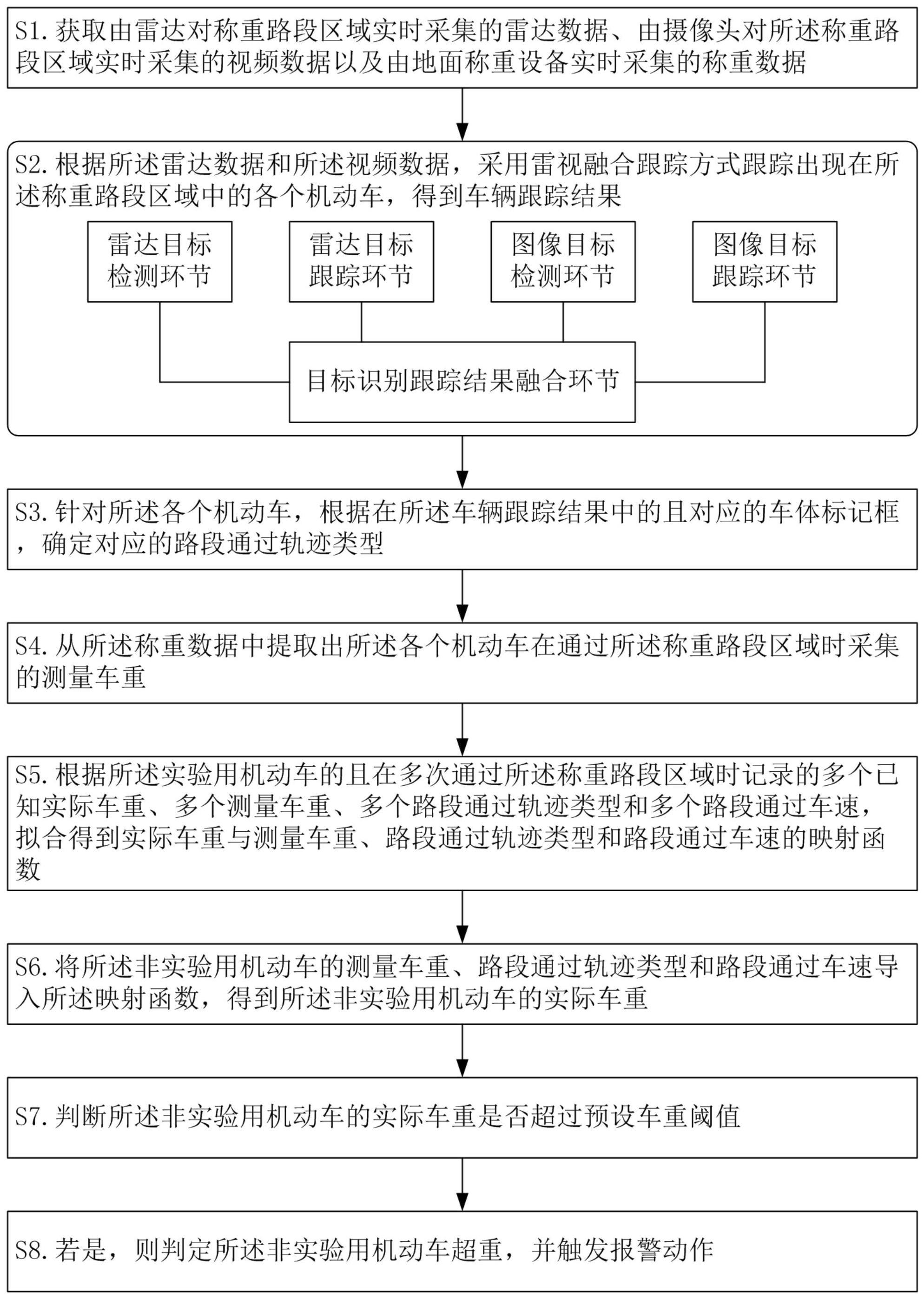
4、获取由雷达对称重路段区域实时采集的雷达数据、由摄像头对所述称重路段区域实时采集的视频数据以及由地面称重设备实时采集的称重数据,其中,所述地面称重设备布置在所述称重路段区域;
5、根据所述雷达数据和所述视频数据,采用雷视融合跟踪方式跟踪出现在所述称重路段区域中的各个机动车,得到车辆跟踪结果,其中,所述车辆跟踪结果包含有所述各个机动车的车体标记框和路段通过车速,所述机动车包括有实验用机动车和非实验用机动车,所述实验用机动车是指以不同的已知实际车重、轨迹类型和/或车速多次先于所述非实验用机动车通过所述称重路段区域的机动车辆;
6、针对所述各个机动车,根据在所述车辆跟踪结果中的且对应的车体标记框,确定对应的路段通过轨迹类型;
7、从所述称重数据中提取出所述各个机动车在通过所述称重路段区域时采集的测量车重;
8、根据所述实验用机动车的且在多次通过所述称重路段区域时记录的多个已知实际车重、多个测量车重、多个路段通过轨迹类型和多个路段通过车速,拟合得到实际车重与测量车重、路段通过轨迹类型和路段通过车速的映射函数,其中,所述多个已知实际车重、所述多个测量车重、所述多个路段通过轨迹类型和所述多个路段通过车速分别与所述多次一一对应;
9、将所述非实验用机动车的测量车重、路段通过轨迹类型和路段通过车速导入所述映射函数,得到所述非实验用机动车的实际车重;
10、判断所述非实验用机动车的实际车重是否超过预设车重阈值;
11、若是,则判定所述非实验用机动车超重,并触发报警动作。
12、基于上述
技术实现要素:
,提供了一种结合雷视融合技术来辅助称重的机动车超重检测新方案,即先根据雷达数据和视频数据,采用雷视融合跟踪方式跟踪出现在称重路段区域中的各个机动车,得到各个机动车的路段通过轨迹类型和路段通过车速,以及从称重数据中提取出各个机动车的测量车重,然后根据实验用机动车的且在多次通过称重路段区域时记录的多个已知实际车重、多个测量车重、多个路段通过轨迹类型和多个路段通过车速,拟合得到实际车重与测量车重、路段通过轨迹类型和路段通过车速的映射函数,最后将非实验用机动车的测量车重、路段通过轨迹类型和路段通过车速导入映射函数,得到非实验用机动车的实际车重,并通过阈值比较方式判断是否超重,如此通过结合雷视融合技术,可以有效防止机动车通过走s型路线达成称重作弊目的,便于实际应用和推广。
13、在一个可能的设计中,根据所述雷达数据和所述视频数据,采用雷视融合跟踪方式跟踪出现在所述称重路段区域中的各个机动车,得到车辆跟踪结果,包括有:雷达目标检测环节、雷达目标跟踪环节、图像目标检测环节、图像目标跟踪环节和目标识别跟踪结果融合环节;
14、所述雷达目标检测环节,用于根据所述雷达数据检测得到出现在所述称重路段区域中的各个障碍物体的位置、速度和方位角;
15、所述雷达目标跟踪环节,用于根据所述雷达数据,采用hm对象跟踪器跟踪所述各个障碍物体,得到所述各个障碍物体的雷达目标跟踪结果;
16、所述图像目标检测环节,用于根据所述视频数据,采用yolo v4目标检测模型识别得到出现在所述称重路段区域中的各个目标物体,得到所述各个目标物体的物体标记框,其中,所述目标物体包含有机动车;
17、所述图像目标跟踪环节,用于根据所述视频数据,采用deepsort多目标跟踪算法跟踪所述各个目标物体,得到所述各个目标物体的视频目标跟踪结果;
18、所述目标识别跟踪结果融合环节,用于根据所述各个障碍物体的位置和方位角以及基于相机标定法确定的所述各个目标物体相对所述摄像头的位置方位,确定为同一物体的至少一对障碍物体与目标物体,并针对所述至少一对障碍物体与目标物体中的各对障碍物体与目标物体,融合对应障碍物体的速度和雷达目标跟踪结果以及对应目标物体的物体标记框和视频目标跟踪结果,得到车辆跟踪结果,其中,所述车辆跟踪结果包含有出现在所述称重路段区域中的各个机动车的车体标记框和路段通过车速,所述机动车包括有实验用机动车和非实验用机动车,所述实验用机动车是指以不同的已知实际车重、轨迹类型和/或车速多次先于所述非实验用机动车通过所述称重路段区域的机动车辆。
19、在一个可能的设计中,针对所述各个机动车,根据在所述车辆跟踪结果中的且对应的车体标记框,确定对应的路段通过轨迹类型,包括:
20、针对所述各个机动车,将在所述车辆跟踪结果中的且对应的车体标记框的框体中心点作为对应的车体中心点,并基于该车体中心点在时序上的三维坐标形成对应的运动轨迹;
21、针对所述各个机动车,将对应的运动轨迹导入基于神经网络的且已预先完成训练的轨迹类型识别模型,输出得到对应的路段通过轨迹类型。
22、在一个可能的设计中,所述路段通过轨迹类型包括直线轨迹类型和s线轨迹类型。
23、在一个可能的设计中,所述映射函数采用如下公式表示:
24、
25、式中,w表示实际车重,f()表示所述映射函数,表示测量车重,t表示路段通过轨迹类型,v表示路段通过车速,a1表示经拟合求得的且在路段通过轨迹类型为直线轨迹类型时测量车重对实际车重的影响系数,b1表示经拟合求得的且在路段通过轨迹类型为直线轨迹类型时路段通过车速对实际车重的影响系数,c1表示经拟合求得的且在路段通过轨迹类型为直线轨迹类型时会对实际车重产生影响的偏置系数,a2表示经拟合求得的且在路段通过轨迹类型为s线轨迹类型时测量车重对实际车重的影响系数,b2表示经拟合求得的且在路段通过轨迹类型为s线轨迹类型时路段通过车速对实际车重的影响系数,c2表示经拟合求得的且在路段通过轨迹类型为s线轨迹类型时会对实际车重产生影响的偏置系数。
26、在一个可能的设计中,触发报警动作,包括:
27、从所述车辆跟踪结果中抽取包含有所述非实验用机动车的车辆图像和车体标记框的视频画面;
28、从所述视频画面中截取所述非实验用机动车的车辆图像,并对所述车辆图像进行车牌矩形轮廓检测处理,得到车牌标记框;
29、根据所述车牌标记框,从所述车辆图像中截取出车牌图像;
30、采用字符识别包pytesseract对所述车牌图像进行字符识别处理,得到字符串,并将所述字符串作为所述非实验用机动车的车牌号码;
31、根据所述非实验用机动车的车牌号码和实际车重生成超重报警消息,并将所述超重报警消息上传至机动车超重监管平台。
32、第二方面,提供了一种机动车超重检测装置,包括有数据获取模块、车辆跟踪模块、轨迹类型确定模块、测量车重提取模块、映射函数拟合模块、实际车重计算模块、超重判断模块和超重报警模块;
33、所述数据获取模块,用于获取由雷达对称重路段区域实时采集的雷达数据、由摄像头对所述称重路段区域实时采集的视频数据以及由地面称重设备实时采集的称重数据,其中,所述地面称重设备布置在所述称重路段区域;
34、所述车辆跟踪模块,通信连接所述数据获取模块,用于根据所述雷达数据和所述视频数据,采用雷视融合跟踪方式跟踪出现在所述称重路段区域中的各个机动车,得到车辆跟踪结果,其中,所述车辆跟踪结果包含有所述各个机动车的车体标记框和路段通过车速,所述机动车包括有实验用机动车和非实验用机动车,所述实验用机动车是指以不同的已知实际车重、轨迹类型和/或车速多次先于所述非实验用机动车通过所述称重路段区域的机动车辆;
35、所述轨迹类型确定模块,通信连接所述车辆跟踪模块,用于针对所述各个机动车,根据在所述车辆跟踪结果中的且对应的车体标记框,确定对应的路段通过轨迹类型;
36、所述测量车重提取模块,通信连接所述数据获取模块,用于从所述称重数据中提取出所述各个机动车在通过所述称重路段区域时采集的测量车重;
37、所述映射函数拟合模块,分别通信连接所述车辆跟踪模块、所述轨迹类型确定模块和所述测量车重提取模块,用于根据所述实验用机动车的且在多次通过所述称重路段区域时记录的多个已知实际车重、多个测量车重、多个路段通过轨迹类型和多个路段通过车速,拟合得到实际车重与测量车重、路段通过轨迹类型和路段通过车速的映射函数,其中,所述多个已知实际车重、所述多个测量车重、所述多个路段通过轨迹类型和所述多个路段通过车速分别与所述多次一一对应;
38、所述实际车重计算模块,分别通信连接所述车辆跟踪模块、所述轨迹类型确定模块、所述测量车重提取模块和所述映射函数拟合模块,用于将所述非实验用机动车的测量车重、路段通过轨迹类型和路段通过车速导入所述映射函数,得到所述非实验用机动车的实际车重;
39、所述超重判断模块,通信连接所述实际车重计算模块,用于判断所述非实验用机动车的实际车重是否超过预设车重阈值;
40、所述超重报警模块,通信连接所述超重判断模块,用于在判定所述非实验用机动车的实际车重超过所述预设车重阈值时,判定所述非实验用机动车超重,并触发报警动作。
41、在一个可能的设计中,所述车辆跟踪模块包括有雷达目标检测单元、雷达目标跟踪单元、图像目标检测单元、图像目标跟踪单元和目标识别跟踪结果融合单元;
42、所述雷达目标检测单元,用于根据所述雷达数据检测得到出现在所述称重路段区域中的各个障碍物体的位置、速度和方位角;
43、所述雷达目标跟踪单元,用于根据所述雷达数据,采用hm对象跟踪器跟踪所述各个障碍物体,得到所述各个障碍物体的雷达目标跟踪结果;
44、所述图像目标检测单元,用于根据所述视频数据,采用yolo v4目标检测模型识别得到出现在所述称重路段区域中的各个目标物体,得到所述各个目标物体的物体标记框,其中,所述目标物体包含有机动车;
45、所述图像目标跟踪单元,用于根据所述视频数据,采用deepsort多目标跟踪算法跟踪所述各个目标物体,得到所述各个目标物体的视频目标跟踪结果;
46、所述目标识别跟踪结果融合单元,分别通信连接所述雷达目标检测单元、所述雷达目标跟踪单元、所述图像目标检测单元和所述图像目标跟踪单元,用于根据所述各个障碍物体的位置和方位角以及基于相机标定法确定的所述各个目标物体相对所述摄像头的位置方位,确定为同一物体的至少一对障碍物体与目标物体,并针对所述至少一对障碍物体与目标物体中的各对障碍物体与目标物体,融合对应障碍物体的速度和雷达目标跟踪结果以及对应目标物体的物体标记框和视频目标跟踪结果,得到车辆跟踪结果,其中,所述车辆跟踪结果包含有出现在所述称重路段区域中的各个机动车的车体标记框和路段通过车速,所述机动车包括有实验用机动车和非实验用机动车,所述实验用机动车是指以不同的已知实际车重、轨迹类型和/或车速多次先于所述非实验用机动车通过所述称重路段区域的机动车辆。
47、第三方面,本发明提供了一种机动车超重检测系统,包括有雷达、摄像头、地面称重设备和智能路侧设备,其中,所述智能路侧设备分别通信连接所述雷达、所述摄像头和所述地面称重设备;
48、所述雷达,用于实时采集获取称重路段区域的雷达数据,并将所述雷达数据实时传输至所述智能路侧设备;
49、所述摄像头,用于实时采集获取所述称重路段区域的视频数据,并将所述视频数据实时传输至所述智能路侧设备;
50、所述地面称重设备,布置在所述称重路段区域,用于实时采集称重数据,并将所述称重数据实时传输至所述智能路侧设备;
51、所述智能路侧设备,用于执行如第一方面或第一方面中任意可能设计所述的机动车超重检测方法。
52、第四方面,本发明提供了一种计算机设备,包括有依次通信连接的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如第一方面或第一方面中任意可能设计所述的机动车超重检测方法。
53、第五方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如第一方面或第一方面中任意可能设计所述的机动车超重检测方法。
54、第六方面,本发明提供了一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使所述计算机执行如第一方面或第一方面中任意可能设计所述的机动车超重检测方法。
55、上述方案的有益效果:
56、(1)本发明创造性提供了一种结合雷视融合技术来辅助称重的机动车超重检测新方案,即先根据雷达数据和视频数据,采用雷视融合跟踪方式跟踪出现在称重路段区域中的各个机动车,得到各个机动车的路段通过轨迹类型和路段通过车速,以及从称重数据中提取出各个机动车的测量车重,然后根据实验用机动车的且在多次通过称重路段区域时记录的多个已知实际车重、多个测量车重、多个路段通过轨迹类型和多个路段通过车速,拟合得到实际车重与测量车重、路段通过轨迹类型和路段通过车速的映射函数,最后将非实验用机动车的测量车重、路段通过轨迹类型和路段通过车速导入映射函数,得到非实验用机动车的实际车重,并通过阈值比较方式判断是否超重,如此通过结合雷视融合技术,可以有效防止机动车通过走s型路线达成称重作弊目的,便于实际应用和推广。
- 还没有人留言评论。精彩留言会获得点赞!