一种基于人工智能的导航路径规划方法
本发明涉及人工智能机器人路线规划,具体为一种基于人工智能的导航路径规划方法。
背景技术:
1、自信息化发展战略实施以来,数字化这一趋势已经深入到人民生活的方方面面。在文化旅游方面,博物馆、纪念馆和文化馆等大型游览场馆相继加入了数字化管理程序。具体到博物馆来说,建设数字化博物馆,是从传统展览时代到新兴科技时代的必由之路,同时也为博物馆焕发出了新的生命,让人民大众以更多的维度去了解博物馆之内的展品。
2、除了将博物馆内展品数字化以外,许多博物馆也采用了导航机器人为游客提供服务。传统导航机器人从运动模式上分为两种,一种是寻迹导航机器人,这种机器人是通过传感器扫描地面上提前铺设好的一条其他颜色的固定线路进行前后运动,它的优点是可以在一定范围的区域内来回高效行走,但是他所能承担的任务只能是一些简单的、重复的、机械式的服务内容,且无法胜任大空间场景的不同需求;另一种是自主导航机器人,此种机器人可以在一个陌生的、不规则的环境中自主导航完成任务,其中最主要的技术是定位、地图建构和路径规划技术。对于路径规划技术来说,目前已有非常成熟的全局规划算法,例如:dijkstra和a*算法。dijkstra算法虽然能为用户找到一条最短的路径,但是由于其广度优先的特性,需要探索非常多的区域来生成结果,非常耗费时间;而a*算法是dijkstra算法和贪婪算法相结合而成的算法,虽然其探索速度相比dijkstra算法要快很多,但是当机器人处于大范围且复杂的场景中时,a*算法生成的路径不能保证优良的要求。此外,算法的运用还需要考虑到实际的使用环境和具体的问题,因此在博物馆导航机器人领域中暂无多少成熟的方法来满足人民日益增加的游览需求。
技术实现思路
1、本发明的目的在于提供一种基于人工智能的导航路径规划方法,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于人工智能的导航路径规划方法,所述导航路径规划方法包括:
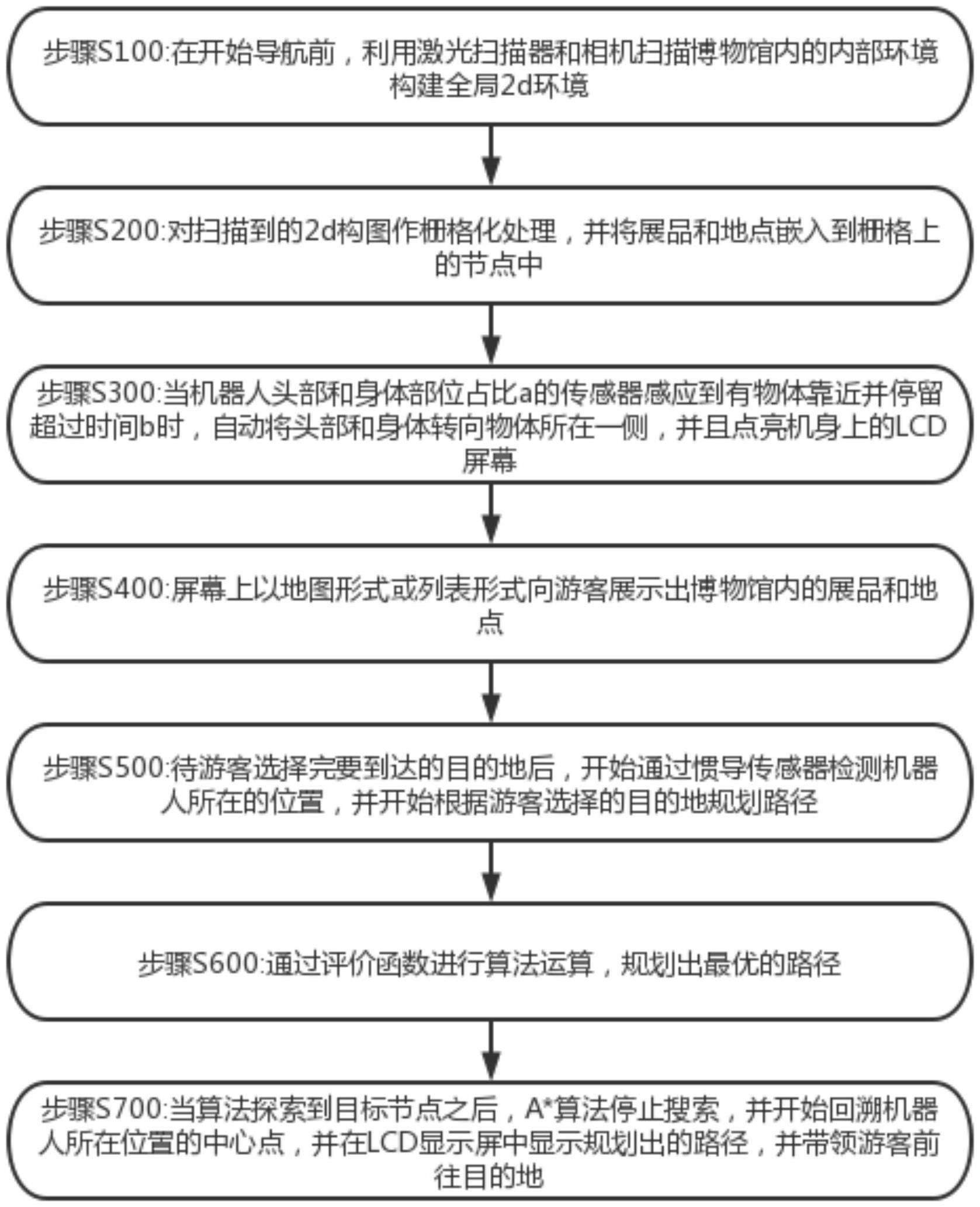
3、步骤s100:在开始导航前,利用激光扫描器和相机扫描博物馆内的内部环境构建全局2d环境;
4、步骤s200:对扫描到的2d构图作栅格化处理,并将展品和地点嵌入到栅格上的节点中,所述展品和地点所在的区域占有一个或多个栅格,每个栅格对应一个节点;
5、步骤s300:当机器人头部和身体部位占比a的传感器感应到有物体靠近并停留超过时间b时,自动将头部和身体转向物体所在一侧,并且点亮机身上的lcd屏幕,其中a和b为预设值,a为80%,b为1.5s;
6、步骤s400:屏幕上以地图形式或列表形式向游客展示出博物馆内的展品和地点;
7、步骤s500:待游客选择完要到达的目的地后,开始通过惯导传感器检测机器人所在的位置,并开始根据游客选择的目的地规划路径;
8、步骤s600:通过评价函数进行算法运算,规划出最优的路径;
9、步骤s700:当算法探索到目标节点之后,a*算法停止搜索,并开始回溯机器人所在位置的中心点,并在lcd显示屏中显示规划出的路径,并带领游客前往目的地。
10、本发明对路径规划算法a*进行改进,通过对其启发函数进行修改,改善a*算法启发函数的不准确性带来的影响、容易陷入局部最优解等问题,提高了算法搜索效率、提升了规划出来的路径的准确性以及改良后的算法更符合博物馆的场景使用需求。
11、进一步的,所述步骤s500包括:
12、步骤s501:若游客选择的是具体的某个产品,则将目标点设置在展品旁边且靠近区域中心点的节点;
13、步骤s502:若游客选择的是某个地点,则将目标点设置在这个地点的入口所在节点。
14、本发明通过游客自主选择目的地,根据不同的目的地对路径进行规划,选择最优路径,并对不同的目的地到达的节点进行不同的选择,更加的方便快捷,提升了路径的准确性,满足了用户的不同使用需求。
15、进一步的,所述算法为改进的a*算法:
16、a*算法的评价函数有实际代价函数g(n)和启发函数h(n)组成,其函数表达式为:
17、f(n)=g(n)+h(n)
18、其中,g(n)为从起始节点到当前节点的实际代价;h(n)为当前节点到目标节点的估计代价,其距离计算方式有曼哈顿距离和欧几里得距离等。曼哈顿距离也称街区距离,顾名思义,其计算距离的方式是计算两点之间在坐标轴上的距离绝对值之和;而欧几里得距离也称欧氏距离,为两点之间的之间直线距离。
19、先将地图栅格化是a*算法开始计算的第一步,每一个方格代表地图上的一个节点,此外,a*算法还有两个存储节点的列表,一个是存储待扩展节点的开放列表openlist;一个是存储已扩展节点的关闭列表closedlist。从起点为中心点开始,计算起点的g(n)为0,h(n)为起点到终点的估计代价,将计算结果放入closedlist,然后,开始计算起点周围8个节点的g(n)和h(n),并将其放入openlist;下一步,取openlist中评价函数值最小的节点为中心点,将其从openlist中取出,放入closedlist中,并对其周围点依次拓展,如若待拓展的点已经在openlist中,选取这个点最小的g(n)方案;下一次拓展同理,直至找到目标点。
20、启发函数h(n)的准确性与合理性对算法的效果有很大影响。此外,a*算法还会在一些对称性的场景下陷入局部最优解,即当当前中心点位于目标节点的对称位置时,算法会在两点之前来回搜索,达到最大搜索深度,增加搜索时间。不仅如此,在公式f(n)=g(n)+h(n)中,启发函数在整个评价函数中的比重也很大程度影响算法最终的路径规划效果,具体结果如下所示:
21、当h(n)=0时,函数表示a*算法退化成dijkstra算法,表示的结果为:能找到最短路径,但是搜索速度最慢;
22、当h(n)<实际代价,函数表示h(n)越小,a*扩展的节点越多,运行越慢,表示的结果为:能找到一条最佳路径,但运行速度变慢;
23、当h(n)=实际代价,函数表示标准a*算法,表示的结果为:标准路径;
24、当h(n)>实际代价,函数表示搜索的节点变少,表示的结果为:运算更快,但是不一定是最佳路径;
25、当h(n)>>g(n),函数表示接近贪婪算法,表示的结果为:运算最快,路径不一定最佳;改进后的启发函数h(n)的函数表达式为:
26、h(n)=ω1d+ω2r;
27、其中,d为当前节点到目标节点的估计代价,ω1为控制d的权重,r为0~0.5的随机数,ω2为控制r的权重,
28、此外,启发函数h(n)的函数表达式中的ω1、ω2和r的赋值如下所示:
29、
30、其中,n为起始点到目标点的最大距离,
31、
32、当前节点距离目标节点越远时,ω1越大,则h(n)在评价函数中的比重越大,搜索算法更倾向于搜索更少的节点来快速找到一条路径;而当距离越近时,搜索算法更倾向于搜索周围更多的节点来保证能找到最佳的路线到达终点,
33、综上所述,改进后的评价函数公式如下所示:
34、f(n)=g(n)+ω1d+ω2r;
35、其中,g(n)为实际代价函数,ω1d+ω2r为启发函数;
36、ω1=exp(ε*d/n)-1,ε>0;
37、
38、d为当前节点到目标节点的距离;
39、n为起始点到目标点的最大距离;
40、
41、r为0~0.5的随机数,
42、所述x坐标和y坐标在根据2d构图的两条垂直的轴线建立坐标系上。
43、本发明对路径规划算法a*进行改进,通过对其启发函数进行修改,改善a*算法启发函数的不准确性带来的影响、容易陷入局部最优解等问题。
44、进一步的,在步骤s100中,扫描单元对博物馆内的内部环境进行扫描,所述扫描单元由激光扫描器和相机组成,2d环境构建单元根据扫描单元的扫描结果构建全局2d环境。
45、本发明通过对博物馆内部环境进行扫描并建立全局2d环境,使用户有更加精细和准确的环境表示,使游客能够更好的体验和理解展示内容。
46、进一步的,在步骤s200中,栅格单元对2d构图进行栅格化处理,所述栅格化处理方法为使用adobe photoshop对2d构图的矢量图形和非像素图像转化为像素图像,嵌入单元用于将展品和地点嵌入到栅格的节点中,所述嵌入的方法为使用adobe photoshop创建展品和地点的图像,添加到新的图层,并与节点对齐。
47、本发明对2d构图进行栅格化处理,将矢量图和非像素图像转换为像素图像,增强了图像的质量,提高了图像的处理效率,支持可视化分析。
48、进一步的,在步骤s300中,传感器单元感应物体靠近机器人并停留的时间,当时间超过1.5s时,机器人自动将头部和身体转向物体所在一侧,通信单元用于点亮lcd屏幕。
49、本发明通过对物体靠近并停留在机器人身边时间进行检测,对机器人进行自动转向,并点亮lcd屏幕,使游客对机器人使用更加的方便。
50、进一步的,在步骤s400中,可视化单元在屏幕上以地图形式或列表形式向游客展示博物馆内的展品和地点。
51、本发明以地图形式或列表形式向游客展示博物馆内的展品和地点,使游客更加清晰的了解博物馆的展品和地点分布。
52、进一步的,在步骤s500中,选择单元用于游客选择想要到达的目的地,所述目的地包括博物馆内的展品和地点,传感器检测单元对机器人所在位置进行检测,决策单元根据用户在选择单元选择的目的地规划路径,所述规划路径方法为当游客选择的是具体的某个产品,则将目标点设置在展品旁边且靠近区域中心点的节点,当游客选择的是某个地点,则将目标点设置在这个地点的入口所在节点。
53、本发明通过对游客选择目的地的最优路径进行规划,提升游客的游览体验,使游客以最短时间到达目的地,更加的便捷。
54、进一步的,在步骤s600中,a*算法单元根据评价函数对路径进行规划,选择出最快的路径,并保证路线最优。
55、本发明对a*算法进行改进,对启发函数进行改善,提升了规划路径的准确性。
56、进一步的,在步骤s700中,报告单元对规划出的路径进行报告显示,机器人立即带领游客前往目的地。
57、本发明对规划的路径进行显示,并由机器人将游客带往目的地,使游客能够清晰的了解到自己前往目的地的路径。
58、与现有技术相比,本发明所达到的有益效果是:
59、(1)本发明对路径规划算法a*进行改进,通过对其启发函数进行修改,改善a*算法启发函数的不准确性带来的影响、容易陷入局部最优解等问题,提高了算法搜索效率、提升了规划出来的路径的准确性以及改良后的算法更符合博物馆的场景使用需求;
60、(2)本发明通过游客自主选择目的地,根据不同的目的地对路径进行规划,选择最优路径,并对不同的目的地到达的节点进行不同的选择,更加的方便快捷,提升了路径的准确性,满足了用户的不同使用需求;
61、(3)本发明通过对博物馆内部环境进行扫描并建立全局2d环境,使用户有更加精细和准确的环境表示,使游客能够更好的体验和理解展示内容;
62、(4)本发明对2d构图进行栅格化处理,将矢量图和非像素图像转换为像素图像,增强了图像的质量,提高了图像的处理效率,支持可视化分析。
- 还没有人留言评论。精彩留言会获得点赞!