一种基于多重傅里叶线性组合器的舰船升沉测量方法
本技术涉及一种基于多重傅里叶线性组合器的舰船升沉测量方法,属于升沉测量领域。
背景技术:
1、舰船或海上平台在海上时,由于受到风、浪等多重因素影响而产生六自由度的空间运动,包括绕三个轴的角运动(纵摇、横摇和艏摇)和沿三个轴的线运动(横荡、纵荡和垂荡即升沉)。其中,具有一定周期性的升沉运动对系统影响和危害最大。因此,准确的测量实时升沉信息无论对于舰船减摇控制还是对于海上稳定平台的补偿等都具有重要的意义。捷联惯导系统(strapdown inertial navigation system,sins)具有很强的自主性,不需要接受任何外部信息即可实现自主测量。因此,基于sins的升沉测量方法具有广泛的适用性。但由于sins的高度通道除了舒勒振荡外,还受到加速度计直流误差等的低频谐波干扰,因此还必须对sins解算出的天向比力信息进行滤波处理才能得到准确的升沉运动信息。
2、针对基于sins的升沉测量,国内外学者都做了大量的工作。wenlinyang发表的《numerical simulation andtestinganalysis ofadaptive heave motionmeasurements》中提出了具有自适应功能的高通滤波器,滤波器参数根据实际环境自适应修正,但是该高通滤波器存在相位超前及幅值衰减等问题,测得的升沉信息误差较大。严恭敏在《导航定位学报》发表的《基于惯导和无时延滤波器的舰船升沉测量》先设计iir数字低通滤波器,再采用互补方法将其转换为无时延的数字高通滤波器,但是其参数要求苛刻,且不具备实时性。在申请专利号为201710202159.5,名称为“一种基于带限傅里叶线性组合的舰船升沉测量方法”的专利文件中,将带限傅里叶线性组合(band-limitedmultiplefourier linear combiner,bmflc)算法应用于舰船升沉信息的测量,用其解决高通滤波器后的相位超前问题。但由于其无先验升沉频率信息,且权值迭代采用lms算法,故其算法精度略低。在申请专利号为202211669949.1,名称为“一种基于捷联惯导的自适应舰船升沉测量方法”中,用bmflc算法补偿高通滤波器的幅相误差问题,其权值迭代采用递推最小二乘算法,虽然其相对来说计算复杂度较低,且能够对多个时刻的数据进行联合估计,但是若数据中存在噪声,其估计精度会大大降低。
技术实现思路
1、本技术的目的在于提供一种基于多重傅里叶线性组合器的舰船升沉测量方法,解决了传统升沉测量的幅值衰减与相位误差问题,有效提高了升沉信息的测量精度,且具有实时性。
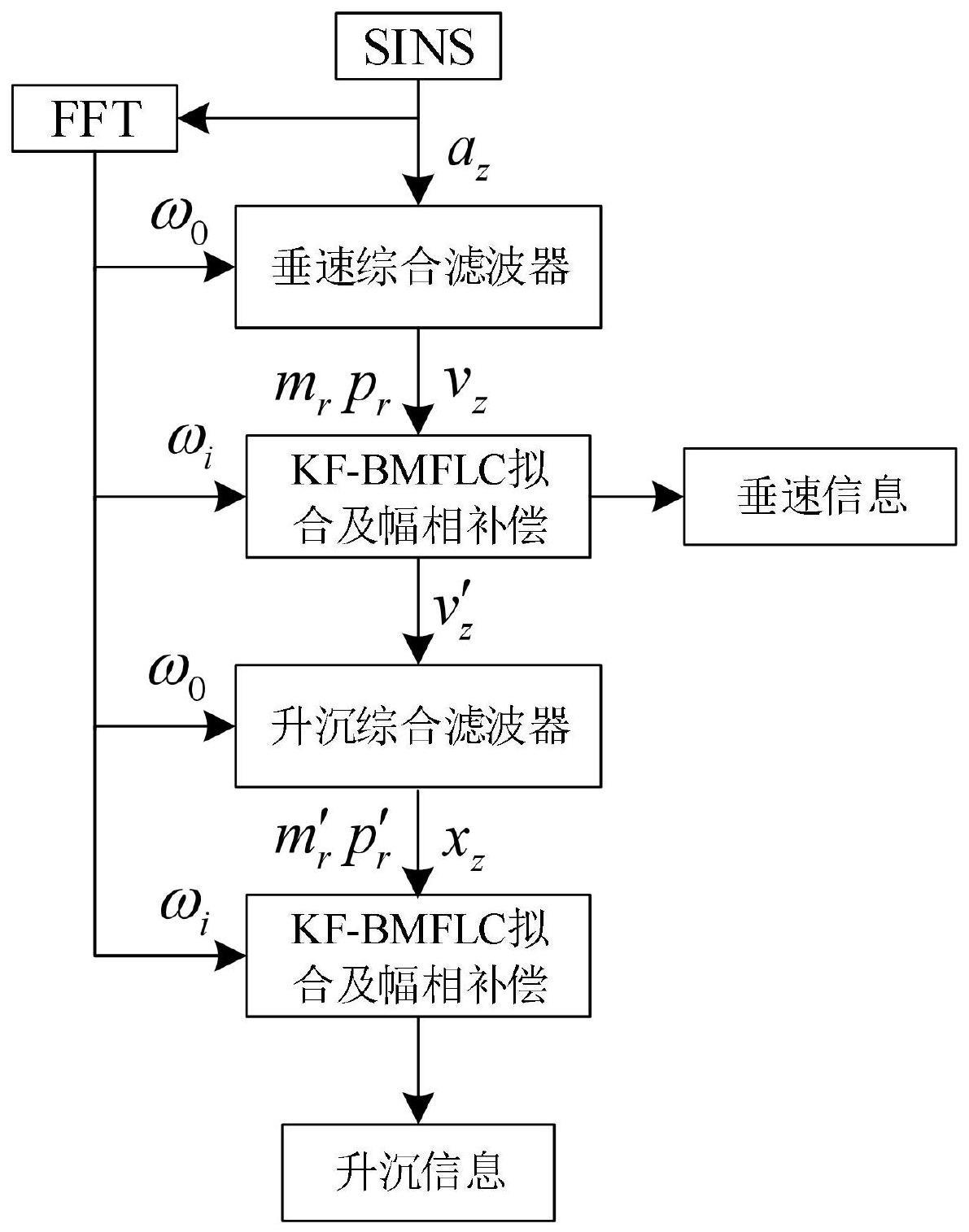
2、为实现上述目的,本技术第一方面提供了一种基于多重傅里叶线性组合器的舰船升沉测量方法,包括:
3、基于捷联惯导系统获取载体坐标系下的垂向加速度;
4、对所述垂向加速度进行n点快速傅里叶变换,得到海浪涌动的相关频域信息;
5、根据所述相关频域信息构建垂速综合滤波器,通过所述垂速综合滤波器对所述垂向加速度进行滤波并得到垂向速度;
6、通过kf-bmflc拟合模型对所述垂向速度进行拟合,并通过kf-bmflc补偿模型对拟合后的所述垂向速度进行幅相补偿,得到目标垂向速度;
7、根据所述相关频域信息构建升沉综合滤波器,通过所述升沉综合滤波器对所述目标垂向速度进行滤波得到升沉位移;
8、通过所述kf-bmflc拟合模型对所述升沉位移进行拟合,并通过所述kf-bmflc补偿模型对拟合后的所述升沉位移进行幅相补偿,得到目标升沉位移。
9、在一种实施方式中,所述根据所述相关频域信息构建垂速综合滤波器包括:
10、将所述相关频域信息作为先验信息,根据所述相关频域信息确定所述垂速综合滤波器的截止频率,所述垂速综合滤波器为:
11、
12、其中,ξ为阻尼系数,ωc为截止频率,s为拉普拉斯算子。
13、在一种实施方式中,所述通过所述垂速综合滤波器对所述垂向加速度进行滤波并得到垂向速度包括:
14、令垂向加速度az通过所述垂速综合滤波器,以对所述垂向加速度az进行一次积分及高通滤波,滤除由低频信号引起的垂速误差,并输出存在幅相误差的垂向速度vz。
15、在一种实施方式中,所述通过kf-bmflc拟合模型对所述垂向速度进行拟合包括:
16、根据所述相关频域信息确定基频带,将所述基频带进行m份等分,得到若干频点fr;
17、将所述若干频点fr作为基频,用正余弦函数对所述垂向速度vz进行线性拟合。
18、在一种实施方式中,所述通过kf-bmflc拟合模型对所述垂向速度进行拟合还包括:
19、将权值wk作为状态量并使用卡尔曼滤波求解最优权值,以提升拟合精度,其中,所述使用卡尔曼滤波求解最优权值包括:通过以下公式进行权值迭代更新:
20、
21、
22、
23、wk|k-1=λwk-1|k-1
24、pk|k-1=λ2pk-1|k-1
25、
26、wk|k=wk|k-1+kkek
27、pk|k=(i-kkxk)pk|k-1+q
28、式中,k为时间序列,xk=[x1k x2k…xrk]t为kf-bmflc在自适应频段中各个频点的基础拟合量,其中r=1,2…2m,m为自适应频段内的频点个数,fr为拟合基频,t为系统采样周期,vk为垂向速度vz在k时刻的元素,v″k为对原始信号vk采用kf-bmflc拟合得到的结果,wk=[w1k w2k…w2mk]t是wk中的一个元素,即bmflc权重,wk-1|k-1为k-1时刻的状态量,wk|k-1为状态量k-1时刻对k时刻的一步预测,wk|k为k时刻的状态量,λ为遗忘因子,uk为状态噪声,υk为量测噪声,kk为卡尔曼增益,q为状态噪声的协方差矩阵,r为量测噪声的协方差矩阵,pk-1|k-1为k-1时刻的后验估计误差协方差矩阵,pk|k-1为k-1时刻到k时刻的估计误差协方差矩阵,pk|k为k时刻估计误差的协方差矩阵;ek为kf量测量与估计量的偏差,i为单位矩阵。
29、在一种实施方式中,所述通过kf-bmflc补偿模型对拟合后的所述垂向速度进行幅相补偿包括:
30、通过以下公式对拟合后的所述垂向速度进行幅相补偿:
31、mr=|h1(jωi)|;pr=∠h1(jωi)
32、
33、v′k=x′ktwk
34、式中,基频角频率ωi=2πfr,mr为bmflc各个基频点的幅值衰减量,pr为各个基频点的相位超前量,v′k为对v″k幅相补偿后得到的目标垂向速度。
35、在一种实施方式中,所述通过所述升沉综合滤波器对所述目标垂向速度进行滤波得到升沉位移包括:
36、令所述目标垂向速度通过所述升沉综合滤波器,以对幅相补偿后的目标垂向速度进行一次积分及高通滤波,并输出存在幅相误差的升沉位移。
37、在一种实施方式中,所述通过所述kf-bmflc拟合模型对所述升沉位移进行拟合,并通过所述kf-bmflc补偿模型对拟合后的所述升沉位移进行幅相补偿包括:
38、根据所述相关频域信息确定基频带,将所述基频带进行m份等分,得到若干频点,将所述若干频点作为基频,用正余弦函数对所述升沉位移进行线性拟合,将权值作为状态量并使用卡尔曼滤波求解最优权值,以提升拟合精度并得到拟合结果;
39、通过所述kf-bmflc补偿模型对所述拟合结果进行幅相补偿,得到目标升沉位移。
40、本技术第二方面提供了一种电子设备,包括:存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,该处理器执行计算机程序时实现上述第一方面或者上述第一方面的任一实施方式中的步骤。
41、本技术第三方面提供了一种计算机可读存储介质,上述计算机可读存储介质存储有计算机程序,上述计算机程序被处理器执行时实现上述第一方面或者上述第一方面的任一实施方式中的步骤。
42、由上可见,本技术提供了一种基于多重傅里叶线性组合器的舰船升沉测量方法,可以对海浪主导频率进行监测,得到海浪涌动的相关频域信息,并以此作为先验信息,从而自适应的改变垂速综合滤波器和升沉综合滤波器的参数以及bmflc的基频带,进而利用提出的kf-bmlfc拟合模型和kf-bmlfc补偿模型得到目标升沉位移,实现对升沉信息的高精度测量,为舰船减荡操作、舰载机起降和海上各类平台的主动升沉补偿提供参考。相较于最小均方和递推最小二乘的权值迭代方法,卡尔曼滤波(kf)的权值迭代算法将系统的状态表示为一个高斯分布,并根据当前的观测数据和噪声模型来更新状态的均值和协方差矩阵。由于卡尔曼滤波利用了系统的先验知识和噪声模型,因此具有较好的噪声抑制和状态估计精度,适用于需要高精度的测量和控制场景。
- 还没有人留言评论。精彩留言会获得点赞!