基于频域修正的宽带全极化动态幅相校准方法
本发明涉及昆虫雷达,具体涉及一种基于频域修正的宽带全极化动态幅相校准方法。
背景技术:
1、昆虫在迁徙过程中经常出现近距离结伴飞行,为了提高昆虫雷达对昆虫个体的测量能力,需要采用宽带雷达以实现高距离分辨率。对昆虫目标的定向角度估计,则需要昆虫目标的全极化信息。为了测量昆虫的瞬时全极化信息,需要采用全极化测量体制。
2、极化测量精度对极化通道间的幅相一致性敏感。然而在宽带全极化雷达系统中,射频链路内部存在有源网络幅度、相位响应时变、频变等问题,会降低极化测量精度。因此,保证极化通道间幅相的一致性,是宽带全极化雷达系统设计的关键要点。
3、现有技术通常采用闭环校准网络实现校准。传统的窄带校准模型是在慢时间维获取距离像后,选取距离像峰值产生一组校准系数,并以此实现窄带系统的幅相校准。然而,在宽带系统中,链路的频率响应函数和相位群延迟具有不确定性,难以使用一组校准系数来实现宽带系统的校准。
技术实现思路
1、有鉴于此,本发明提出一种基于频域修正的宽带全极化动态幅相校准方法。通过动态对雷达射频链路频域响应进行幅相校准,解决非理想因素导致的不同极化通道间幅度和相位存在误差的问题,提高雷达系统的极化测量精度,最终实现更准确的昆虫迁飞态势测量。
2、为达到上述目的,本发明的技术方案包括如下步骤:
3、步骤一,建立宽带全极化雷达系统极化测量误差模型;
4、步骤二,基于步骤一中建立的宽带全极化雷达系统极化测量误差模型,建立射频链路内部闭环校准网络的数学模型;
5、步骤三,设计分时工作流程,使雷达系统在三种工作模式下交替执行工作;
6、步骤四,设计主通道工作模式,对目标瞬时psm进行测量;
7、步骤五,设计发射通道校准工作模式,获取发射通道的测量误差;
8、步骤六,设计接收通道校准工作模式,获取接收通道的测量误差;
9、步骤七,基于动态校准原理,定时将链路幅相增益系数校准至参考状态。
10、进一步而言,步骤一具体为:
11、首先建立宽带全极化雷达系统极化测量误差模型。
12、在一个检测周期内,雷达对昆虫目标进行瞬时极化测量的误差模型为:
13、vr(t)=i*r(t)*c*s*c*t(t)*vt(t)
14、其中,vr(t)表示接收信号函数矩阵,vt(t)表示发射信号函数矩阵,r(t)表示有源接收链路增益函数矩阵,c为天线极化泄露矩阵,c可通过pctar极化定标方法获取,s为被测目标的psm,t(t)表示有源发射链路增益函数矩阵,i表示基带信号泄漏矩阵。在该模型中,vr(t)和vt(t)分别代表发射和接收信号时域表达,并在雷达运行过程中为确定值。矩阵之间的“*”运算表示函数之间的卷积,定义如下:
15、
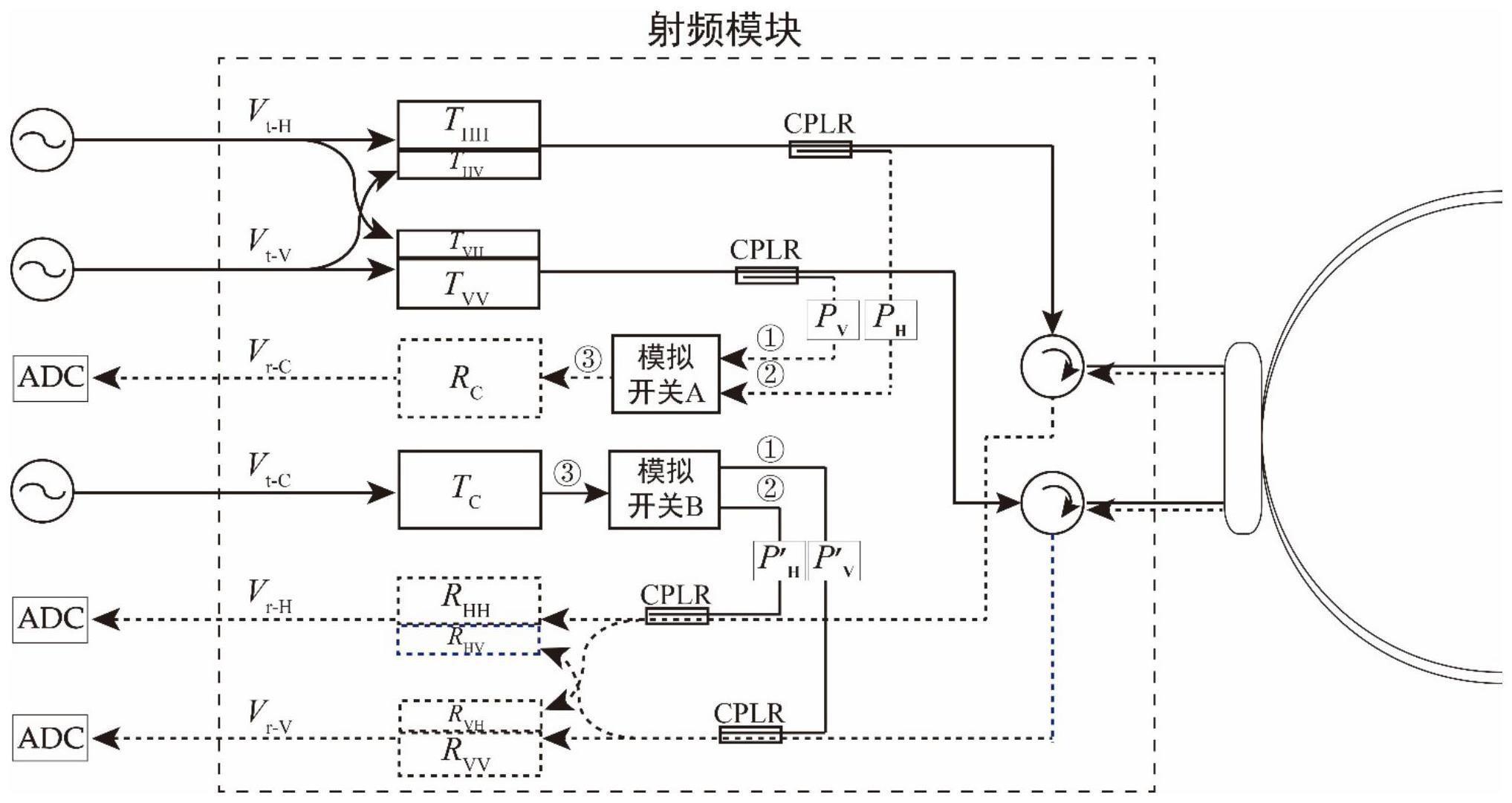
16、进一步地,步骤二中,基于宽带全极化雷达系统极化测量误差模型建立射频链路内部闭环校准网络的数学模型;具体为:
17、闭环校准网络的数学模型可以表示为:
18、vr(t)=r(t)*p(t)*t(t)*vt(t)
19、p(t)表示无源链路的幅相响应差异函数矩阵。定义射频模块增益函数矩阵为n(t):
20、
21、上式中,n(t)的构成元素nij(t)表示不同的链路增益函数。其中i表示接收极化通道名称,j表示信号来源极化通道名称,i和j取值为h或v。发射误差矩阵和接收误差矩阵的元素都以系统响应函数的形式表达。通过消除回波信号随着闭环链路延迟的变化而造成的相位影响,可以得到的目标回波信息,表达式为:
22、
23、进一步地,步骤三中,设计一个分时工作流程,使雷达系统在主通道工作模式、发射通道校准模式和接收通道校准模式下交替执行工作。这三种模式在时间上以帧周期td进行分配,并以顺序循环的方式进行切换。在主通道工作模式下,可认为在该时间段内(10分钟)系统有源链路的幅相响应变化较小。在校准模式(发射通道校准模式、接收通道校准模式)下,雷达系统可以在4×td时间内完成宽带频域的自适应校准,以保证系统在主通道工作模式下的测量精度稳定性。
24、进一步地,步骤四中,设计雷达系统的主通道工作模式,在此模式下,雷达系统对目标的瞬时psm进行测量。
25、进一步地,步骤五中,设计发射通道校准模式,通过h路发射校准和v路发射校准获取发射通道的测量误差。
26、h路发射校准时,雷达只发射h路信号,此时vt(f)=[vt-h(f) 0]t,射频模块增益函数矩阵可写为:
27、
28、该模式下由于共用接收校准通路,且通道增益函数为rc(f),可以通过化简得到该模式下系统闭环链路的增益函数矩阵:
29、
30、v路发射校准时,雷达只发射v路信号,此时vt(f)=[0 vt-v(f)]t,射频模块增益函数矩阵可写为:
31、
32、该模式下由于共用接收校准通路,且通路增益函数为rc(f),可以通过化简得到该模式下系统闭环链路的增益函数矩阵为:
33、
34、结合h路发射通道校准时的系统闭环链路增益函数矩阵和v路发射通道校准时的系统闭环链路增益函数矩阵,可以得到发射校准链路增益频域函数矩阵为nt(f):
35、
36、进一步地,步骤六中,设计接收通道校准模式,通过h路接收校准和v路接收校准获取接收通道的测量误差。
37、h路接收校准时,雷达系统只发射h路信号,此时vt(f)=[vt-h(f) 0]t,射频模块增益函数矩阵可写为:
38、
39、该模式下由于共用发射校准通路,且通道增益函数为tc(f),可以通过化简得到该模式下系统闭环链路的增益函数矩阵为:
40、
41、v路发射校准时,雷达系统只发射v路信号,此时vt(f)=[0 vt-v(f)]t,射频模块增益函数矩阵可写为:
42、
43、该模式下由于共用发射校准通路,且通道增益函数为tc(f),可以通过化简得到该模式下系统闭环链路的增益函数矩阵为:
44、
45、结合h路接收通道校准时的系统闭环链路增益函数矩阵和v路接收通道校准时的系统闭环链路增益函数矩阵,可以得到接收校准链路增益频域函数矩阵为nr(f):
46、
47、进一步地,步骤七中,利用动态校准的原理,定时将链路幅相增益系数校准至参考状态。
48、通过步骤五和步骤六可以获得一组内部链路增益函数矩阵nr(f)和nt(f)。
49、
50、
51、动态校准的原理,是在雷达完成外部极化校准后的t0时刻,立即记录内部链路的幅相增益函数矩阵nt-0(f)、nr-0(f)作为参考,在雷达工作过程,定时将链路幅相增益系数校准至参考状态,以保证系统对目标的测量处于稳定状态。校准过程如下:
52、定义获取的参考系数函数矩阵为nt-0(f)和nr-0(f):
53、
54、
55、在雷达工作环境变化后的某一时刻t1,信号链路的幅相增益函数矩阵发生了变化,记为nt-1(f)和nr-1(f),定义其表达式为:
56、
57、
58、进一步可得参考校准函数矩阵t0(f)、r0(f)获取方法为:
59、
60、
61、雷达测量目标时,在t0时刻测量目标psm,极化测量函数矩阵的频域表达式为:
62、m0(f)=r0(f)c(f)s(f)c(f)t0(f)
63、此时认为雷达刚完成极化校准,其内部幅相误差短时间处于平衡状态,在t1时刻测量目标psm时,极化测量函数矩阵为:
64、m1(f)=r1(f)c(f)s(f)c(f)t1(f)
65、通过化简可得校准后的极化测量函数矩阵为:
66、
67、通过频域校准的结果nr-0(f)、及nt-0(f),对目标测量结果psm进行校准,以此来保证目标psm测量结果不受环境的变化保持稳定。
68、有益效果:
69、1、本发明公开了一种基于频域修正的宽带全极化动态幅相校准方法,为保证宽带全极化雷达的极化通道间幅相一致性提供了一种有效手段。该方法首先建立了宽带全极化雷达系统极化测量误差模型,然后建立了射频链路内部闭环校准网络的数学模型,设计了宽带全极化雷达的工作流程和三种工作模式,利用动态校准原理将链路幅相增益系数校准至参考状态,提高了系统全极化测量的精度。
70、2、本发明提供的基于频域修正的宽带全极化动态幅相校准方法,解决了传统窄带校准模型对宽带系统不适用的问题,建立了宽带全极化雷达系统极化测量误差模型和射频链路内部闭环校准网络的数学模型,在该模型基础上对工作状态进行校准。
71、3、本发明提供的基于频域修正的宽带全极化动态幅相校准方法,对误差模型中的每个频域采样点进行校准,从而解决了传统时域校准方法中单点校准系数维度不足的问题。
72、4、本发明提供的分时工作流程,使雷达系统在三种工作模式下交替执行工作,通过发射通道校准和接收通道校准两种工作模式,保证了主通道工作模式下的测量精度的稳定性。
73、5、本发明采用动态校校准原理进行极化校准,在雷达工作过程中,可以定时将链路幅相增益系数校准至参考状态,从而保证pctar极化校准的性能长期稳定,提高雷达对昆虫目标psm的测量精度。
- 还没有人留言评论。精彩留言会获得点赞!