基于密度域敏感空间学习的滚动轴承故障诊断方法
本发明涉及一种基于密度域敏感空间学习的滚动轴承故障诊断方法,它属于模式识别和故障诊断领域。
背景技术:
1、近年由于现代工厂数量和规模不断增加,现代机械设备正朝着高效、高自动化和高复杂化的方向不断发展。同时,设备之间的关系也变得愈加紧密。由于设备之间的复杂关联,即使一个微小的故障也可能引发连锁反应,导致整个机械设备出现毁坏性的故障。这不仅会造成巨大的经济损失,还会危及人员生命安全。因此,高效、准确的故障诊断是确保工业过程平稳、安全运行的关键。针对滚动轴承故障,目前的故障诊断方法主要分为三类:基于分析模型、基于知识和基于数据驱动的方法。其中数据驱动方法中,通过传感器和各种测量仪器可以很容易采集信号,确定故障类型。然而采集到的信号是往往是非平稳和非线性的,时域和频域特征都无法全面表达信号。因此,通常采用时频特征来描述信号的能量分布和时变特征。那么如何保持特征空间中的局部和全局结构以及类别信息。
2、近年来,基于空间学习方法的滚动轴承故障诊断方法已经被深入研究,并被广泛应用于故障诊断领域。核心思想是在保留原始空间样本结构信息的前提下,如何在投影到特征空间中是保持局部全局结构。最经典的空间学习算法主成分分析和独立成分分析,二者都只关注样本之间的全局信息,忽略了局部信息。因此,许多基于流形学习的方法应运而生,局部保持投影是一种解决局部流行结构和样本分布限制的方法,将原始空间中样本的局部流行结构降至低维空间,但忽略了样本全局流形结构。为了充分利用样本的局部流行结构和全局流行结构,近年来提出了许多基于局部保持投影改进的流行结构算法。提出了基于判别保持投影,该方法融合样本类别信息,提高低维样本之间类间可分性和类内聚合性。为了寻求最大化类间散布和最消化局部聚合,提出了基于最大边界准则的局部保持投影,该算法可以局部来保持类间散布和类内散布的范围。然而以上方法没有利用样本的全局结构信息。将几何信息与判别信息结合,提出了一种新判别正交弹性保持投影。该方法将判别信息与全局-局部信息融合,并加入了最大间隔准则和投影正交约束,既充分利用判别信息,又保持样本之间的弹性结构。重构图结构从类全局和类局部作为出发点,提出了基于局部-全局平衡正交判别投影,该方法通过捕捉类内局部信息、类间局部信息、类内非局部信息和类间非局部信息,在保持高维故障样本集内在流行结构的同时有效提取全局特征信息。
3、然而,在现有的降维方法中,广泛使用欧式距离来作为相似性的度量方法。但当样本处于高密度邻域下所携带的信息不容忽略,从而导致单一使用欧式距离作为相似度量方法,会使图结构丢失样本所携带的信息,造成分类效果差。
技术实现思路
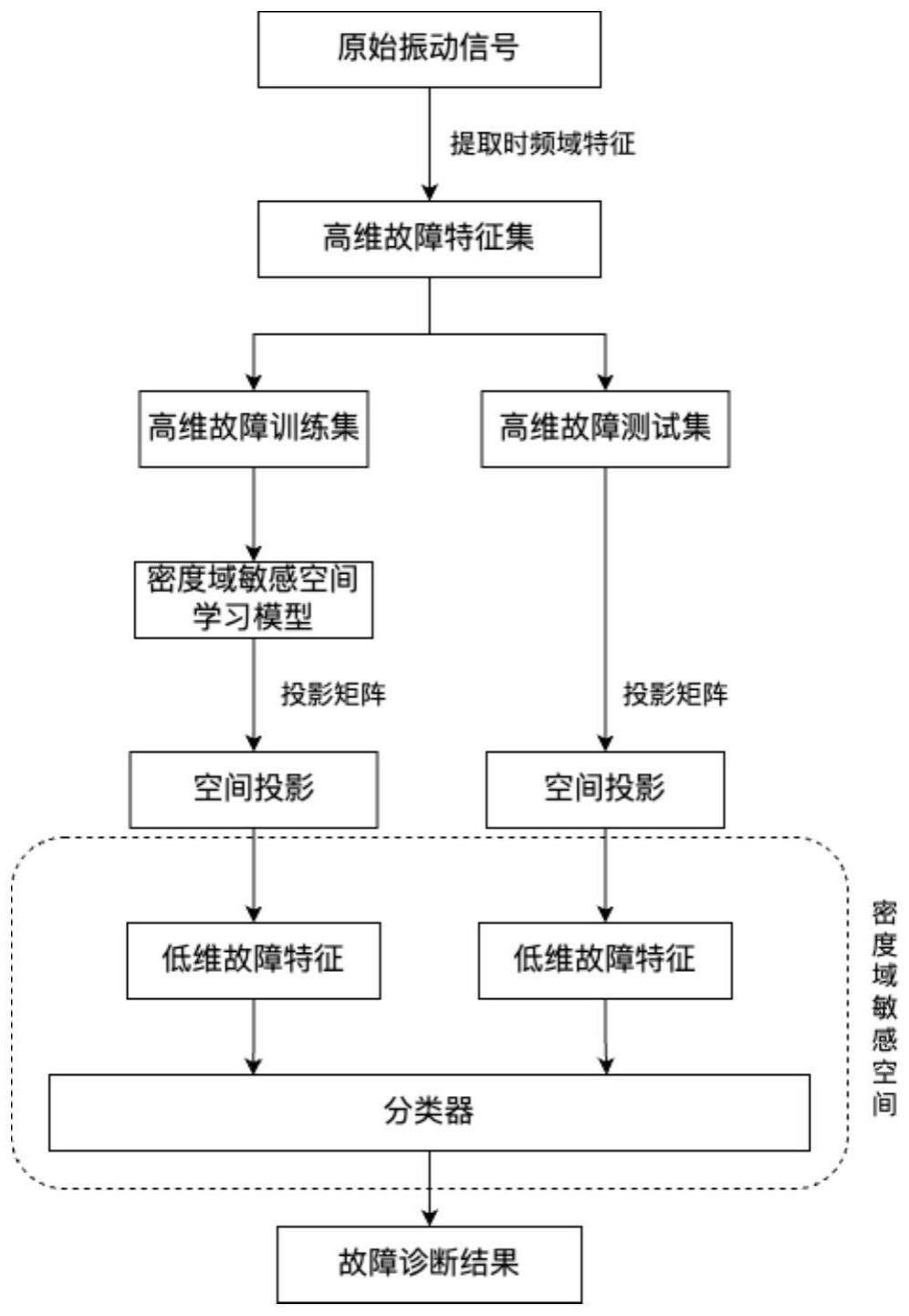
1、本发明公布一种基于密度域敏感空间学习的滚动轴承故障诊断方法,以此来解决传统故障诊断算法无法充分揭示复杂的高阶关系和保留丰富的故障特征问题,具体方法步骤如下:
2、1、通过传感器采集机械设备中滚动轴承的振动监测信号,分别从时域、频域和时频域角度提取多个故障数据相关统计特征,以构建高维故障样本集,将高维故障样本集划分为高维故障训练样本集x=[x1,x2,...,xn]∈rm×n和高维故障测试样本集其中m为样本维数,n为训练样本个数,为测试样本个数,xi为x的第i个高维故障训练样本,为的第i个高维故障测试样本。
3、2、通过密度域敏感空间学习模型的构建和优化求解,获得高维故障特征的低维表示,具体实现方式如下:
4、(2a)构建密度域约束,并以此为基础进一步给对应于四种不同图结构的目标函数,具体实现过程如下:
5、xi和xj代表为高维故障样本,计算不对称的排序距离r(xi,xj)表示为:
6、
7、其中为xi在距离排序的第m个近邻点,表示xi在xj距离排序表中的位置,由此代表的是样本点在xj距离排序表中的位置。最后,将不对称的距离通过归一化的得到对称的xi和xj之间的排序距离r(xi,xj)为:
8、
9、高维故障样本的密度约束dw为:
10、
11、其中k表示局部近邻参数,msamlpex代表样本的密度中值。以密度约束为基础,构建局部密度约束图、全局密度约束图、类内密度约束图和类间密度约束图,和其对应的四种不同图结构目标函数,具体实现过程如下:
12、①定义局部密度约束图gld(x,sld),其中x是高维故障训练样本集,sld为局部密度约束图的权重矩阵,sld的第(i,j),i=1,2,...,n,j=1,2,...,n个元素为元素的定义如下:
13、
14、其中t热核参数,ρ=r(xi,xj)+dw。其中nk(xj)为x中第j个高维故障训练样本xj的前k个近邻样本集合,nk(xi)为x中xi的前k个近邻样本集合,在图gld中局部密度约束散布矩阵定义为:
15、
16、其中能够进行下列等价推导
17、
18、其中lld=x(dld-sld)xt,dld是对角矩阵,对角线上的元素是的列和,即因此局部密度约束函数为:
19、
20、②定义全局密度约束图ggd(x,wgd),其中x是高维故障训练样本集,wgd为全局密度y束图的权重矩阵,wgd的第(i,j),i=1,2,...,n,j=1,2,...,n个元素为元素的定义如下:
21、
22、在图ggd中全局密度约束散布矩阵定义为:
23、
24、其中能够进行下列等价推导:
25、
26、其中lgd=x(dgd-sgd)xt,dgd是对角矩阵,对角线上的元素是的列和,即因此全局密度约束函数为:
27、
28、③定义类内密度约束图其中x是高维故障训练样本集,为类内密度约束图的权重矩阵,的第(i,j),i=1,2,...,n,j=1,2,...,n个元素为元素的定义如下:
29、
30、其中是类内密度约束权重,是类内密度约束权重。li和lj分别为xi和xj的类标签。在图中类内密度约束散布矩阵定义为:
31、
32、其中能够进行下列等价推导:
33、
34、其中dad是对角矩阵,对角线上的元素是的列和,即因此,类内密度约束函数为:
35、
36、④定义类间密度约束图其中x是高维故障训练样本集,是类间密度约束图的权重矩阵,的第(i,j),i=1,2,...,n,j=1,2,...,n个元素为其中元素的定义如下:
37、
38、其中是类间密度判别权重。在图中类间密度约束散布矩阵定义为:
39、
40、其中能够进行下列等价推导:
41、
42、其中ded是对角矩阵,对角线上的元素是的列和,即因此,类间密度约束函数为:
43、
44、(2b)通过上述四种不同图结构目标函数,构建密度域敏感空间学习模型:
45、
46、s.t.ptp=i
47、其中p是投影矩阵,i为单位矩阵,tr(·)为矩阵的迹运算,α和β是调整因子。
48、(2c)求解该模型的投影矩阵,并利用空间投影获得低维故障特征,具体实现方式如下:
49、构建密度域敏感空间学习模型的拉格朗日乘子函数l(p):
50、
51、其中λ是拉格朗日乘子;通过将l(p)对投影矩阵p的偏导值设为零,可将密度域敏感空间学习模型转化的优化问题转化为下列广义特征值分解问题:
52、x(lge-lla)xtp=λp
53、其中xt为x的矩阵转置,在该广义特征值分解问题中,拉格朗日乘子λ也被称为特征值,投影方向p由前d个最大特征值对应的特征向量组成,即p=[p1,p2,...,pd]∈rm×d,其中d为投影方向的投影参数,pi为第i个最大特征值对应特征向量;最后利用空间投影和投影矩阵获得高维故障训练样本集x的低维故障特征y和高维故障测试样本集的低维故障特征其中pt为p的矩阵转置。
54、3、借助分类器,对低维故障特征进行故障辨识,以获得最终的故障诊断结果。
55、本发明的有益效果是:构建密度域敏感空间模型,将密度约束融入局部结构、全局结构、类内结构和类间结构,密度约束可以挖掘样本间潜在流形信息,保留更为丰富的故障特征。解决了欧式度量无法充分揭示流形内在结构的问题,实现多角度信息的互补。实验结果表明,该方法可以提取更为有效的故障判别特征,提高故障诊断的准确性。
- 还没有人留言评论。精彩留言会获得点赞!