车辆测试场景生成方法、装置、存储介质及设备与流程
本发明涉及自动驾驶安全测试,具体而言,涉及一种车辆测试场景生成方法、装置、存储介质及设备。
背景技术:
1、随着自动驾驶技术的深入发展,部分自动驾驶产品已在特定场景和条件下投入了商业使用。车辆测试场景的构建是进行自动驾驶测试的重要基础,也是决定自动驾驶测试是否充分的关键因素,但受到计算能力、空间位置、传感器水平、气候条件等因素的制约,高级别自动驾驶所遇到的“长尾效应”问题不断涌现,许多边缘场景下的自动驾驶仍十分困难。
2、目前的自动驾驶的测试场景仍以“孤车智能”下的车为测试对象,考虑因素仍局限于单车的传感器、执行机构、道路环境等,没有充分考虑到云端状态、路侧状态等外在场景要素的影响,但随着场景要素的增加,需测试的场景数量随之呈指数式的增长,即使采用仿真测试的方法,测试工作量和测试的耗时也是难以估量的,无法满足车路协同下高效测试智能汽车自动驾驶的需求。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种车辆测试场景生成方法、装置、存储介质及设备,以至少解决现有的车辆测试场景生成方法缺少车路协同要素,且测试要素数量庞大,测试效率较低的技术问题。
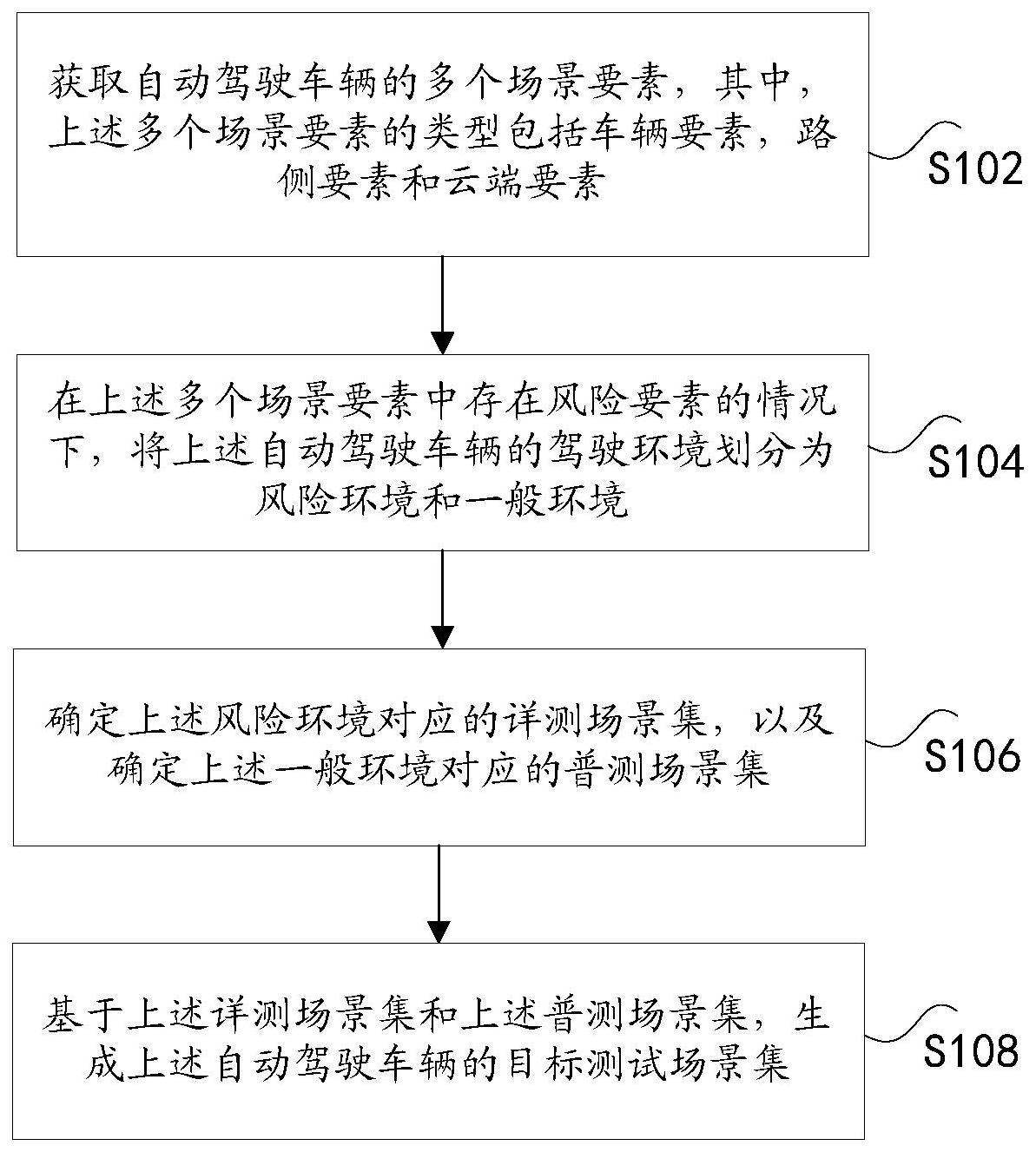
2、根据本发明实施例的一个方面,提供了一种车辆测试场景生成方法,包括:获取自动驾驶车辆的多个场景要素,其中,上述多个场景要素的类型包括车辆要素,路侧要素和云端要素;在上述多个场景要素中存在风险要素的情况下,将上述自动驾驶车辆的驾驶环境划分为风险环境和一般环境;确定上述风险环境对应的详测场景集,以及确定上述一般环境对应的普测场景集;基于上述详测场景集和上述普测场景集,生成上述自动驾驶车辆的目标测试场景集。
3、可选的,上述获取自动驾驶车辆的多个场景要素,包括:确定车辆测试场景的多个场景要素层级;分别对上述多个场景要素层级进行二级分层细化或者多级分层细化,得到上述多个场景要素层级分别对应的细化场景要素,并将上述多个场景要素层级分别对应的细化场景要素作为上述自动驾驶车辆的多个场景要素。
4、可选的,上述基于上述风险要素,将上述自动驾驶车辆的驾驶环境划分为风险环境和一般环境,包括:枚举出与上述风险要素相似的相似风险要素;确定包括上述风险要素或者上述相似风险要素的驾驶环境为上述风险环境,以及不包括上述风险要素和上述相似风险要素的驾驶环境为上述一般环境。
5、可选的,上述确定上述风险环境对应的详测场景集,以及确定上述一般环境对应的普测场景集,包括:基于第一颗粒度,确定上述风险环境对应的详测场景集,以及基于第二颗粒度,确定上述一般环境对应的普测场景集,其中,上述第一颗粒度小于上述第二颗粒度。
6、可选的,上述确定上述一般环境对应的普测场景集,包括:确定上述自动驾驶车辆在当前时刻的危险背景车辆,其中,上述自动驾驶车辆的背景车辆包括普通背景车辆和上述危险背景车辆,上述危险背景车辆为发生碰撞概率最大的背景车辆;获取上述危险背景车辆在上述当前时刻的初始状态;基于上述危险背景车辆在上述当前时刻的初始状态对应的自然-风险对抗混合分布,对上述危险背景车辆进行机动采样,得到上述危险背景车辆在上述当前时刻的下一时刻的机动状态,其中,基于上述自然-风险对抗混合分布进行机动采样时发生碰撞的概率大于基于自然状态下机动分布进行机动采样时发生碰撞的概率;基于上述自然状态下机动分布,对上述普通背景车辆进行机动采样,得到上述普通背景车辆在上述当前时刻的下一时刻的机动状态;基于上述危险背景车辆在上述当前时刻的下一时刻的机动状态和上述普通背景车辆在上述当前时刻的下一时刻的机动状态,确定上述一般环境对应的普测场景集。
7、可选的,上述基于上述危险背景车辆在上述当前时刻的下一时刻的机动状态和上述普通背景车辆在上述当前时刻的下一时刻的机动状态,确定上述一般环境对应的普测场景集,包括:重复得到上述危险背景车辆和上述普通背景车辆分别在预定时长内多个时刻的机动状态,基于上述预定时长内多个时刻的机动状态确定上述一般环境对应的普测场景;重复上述预定时长多次,得到上述一般环境对应的普测场景集。
8、可选的,在基于上述危险背景车辆在上述当前时刻的初始状态对应的自然-风险对抗混合分布,对上述危险背景车辆进行机动采样,得到上述危险背景车辆在上述当前时刻的下一时刻的机动状态之前,上述方法还包括:获取上述危险背景车辆在上述当前时刻的初始状态下的自然状态下碰撞概率分布;获取车辆的自然状态下机动分布;基于上述自然状态下碰撞概率分布和上述自然状态下机动分布,确定上述危险背景车辆在上述当前时刻的初始状态对应的自然-风险对抗混合分布。
9、可选的,上述获取上述危险背景车辆在上述当前时刻的初始状态下的自然状态下碰撞概率分布,包括:获取上述危险背景车辆在上述当前时刻的初始状态下的机动-碰撞概率分布;基于上述机动-碰撞概率分布和上述自然状态下机动分布,确定上述自然状态下碰撞概率分布。
10、可选的,上述获取上述危险背景车辆在上述当前时刻的初始状态下的机动-碰撞概率分布,包括:将上述危险背景车辆在上述当前时刻的初始状态输入对抗驾驶智能体模型,得到上述危险背景车辆在上述当前时刻的初始状态下的机动-碰撞概率分布,其中,上述对抗驾驶智能体模型基于样本被测车辆与样本背景车辆之间的碰撞训练得到。
11、可选的,上述基于上述自然状态下碰撞概率分布和上述自然状态下机动分布,确定上述危险背景车辆在上述当前时刻的初始状态对应的自然-风险对抗混合分布,包括:将上述自然状态下碰撞概率分布和上述自然状态下机动分布按照预定比例混合的方式,获得上述危险背景车辆在上述当前时刻的初始状态对应的自然-风险对抗混合分布。
12、可选的,上述确定上述自动驾驶车辆在当前时刻的危险背景车辆,包括:在上述自动驾驶车辆的背景车辆为多个的情况下,分别获取多个背景车辆分别在上述当前时刻对应的自然状态下碰撞概率分布;对上述多个背景车辆分别在上述当前时刻对应的自然状态下碰撞概率分布中各种机动状态下的概率进行求和,得到求和概率;确定上述多个背景车辆中求和概率最大的背景车辆为上述危险背景车辆。
13、可选的,上述基于上述详测场景集和上述普测场景集,生成上述自动驾驶车辆的目标测试场景集,包括:对上述详测场景集中的多个详测场景进行第一去冗余处理,得到第一去冗余处理后的详测场景集;对上述普测场景集中的多个普测场景进行第二去冗余处理,得到第二去冗余处理后的普测场景集;基于上述第一去冗余处理后的详测场景集和上述第二去冗余处理后的普测场景集,得到上述自动驾驶车辆的上述目标测试场景集。
14、可选的,上述第一去冗余处理和上述第二去冗余处理,包括:确定多个场景中的等价场景,通过合并上述等价场景的方式去除冗余场景;确定多个场景中存在隶属关系的隶属场景中的子场景,通过去除上述子场景的方式去除冗余场景。
15、根据本发明实施例的另一方面,还提供了一种非易失性存储介质,上述非易失性存储介质存储有多条指令,上述指令适于由处理器加载并执行任意一项上述的车辆测试场景生成方法。
16、根据本发明实施例的另一方面,还提供了一种电子设备,包括存储器和处理器,上述存储器中存储有计算机程序,上述处理器被设置为运行上述计算机程序以执行任意一项上述的车辆测试场景生成方法。
17、在本发明实施例中,通过获取自动驾驶车辆的多个场景要素,其中,上述多个场景要素的类型包括车辆要素,路侧要素和云端要素;在上述多个场景要素中存在风险要素的情况下,将上述自动驾驶车辆的驾驶环境划分为风险环境和一般环境;确定上述风险环境对应的详测场景集,以及确定上述一般环境对应的普测场景集;基于上述详测场景集和上述普测场景集,生成上述自动驾驶车辆的目标测试场景集,达到了将众多驾驶环境分为风险环境和一般环境,并分别在两种类型环境下进行场景合并,确定详测场景集和普测场景集的目的,从而实现了在考虑路侧要素和云端要素的同时,减少冗余场景的测试,满足车路协同下高效测试智能汽车自动驾驶的需求的技术效果,进而解决了现有的车辆测试场景生成方法缺少车路协同要素,且测试要素数量庞大,测试效率较低的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!