一种基于激光图像特征的浊度测量方法与装置
本发明属于浊度分析,尤其涉及一种基于激光图像特征的浊度测量方法。
背景技术:
1、水的浊度表征水的光学性质,表示水中悬浮物和胶体物对光线透过时所产生的阻碍程度。浊度是水质评价的重要标准之一。在工业和生活中,为保证使用水和排放水的安全性,入水和出水都需要进行浊度测量。因此,浊度测量能有效地保护和节约水资源。
2、浊度主要通过透射法、散射法、比浊法和分光光度计法等方法进行测量。目前商用浊度计普遍使用散射法进行设计。而散射法只适合于测量中低浊度,且浊度计测量时间长,测量精度低。多次测量取平均值虽能降低测量误差,但忽略了被测溶液是否沉淀的情况,并且耗时过长,不满足于工业和日常生活的使用需求。
技术实现思路
1、针对现有技术不足,本发明提出了一种基于激光图像特征的浊度测量方法。
2、根据本发明实施例第一方面,提供了一种基于激光图像特征的浊度测量方法,所述方法包括:
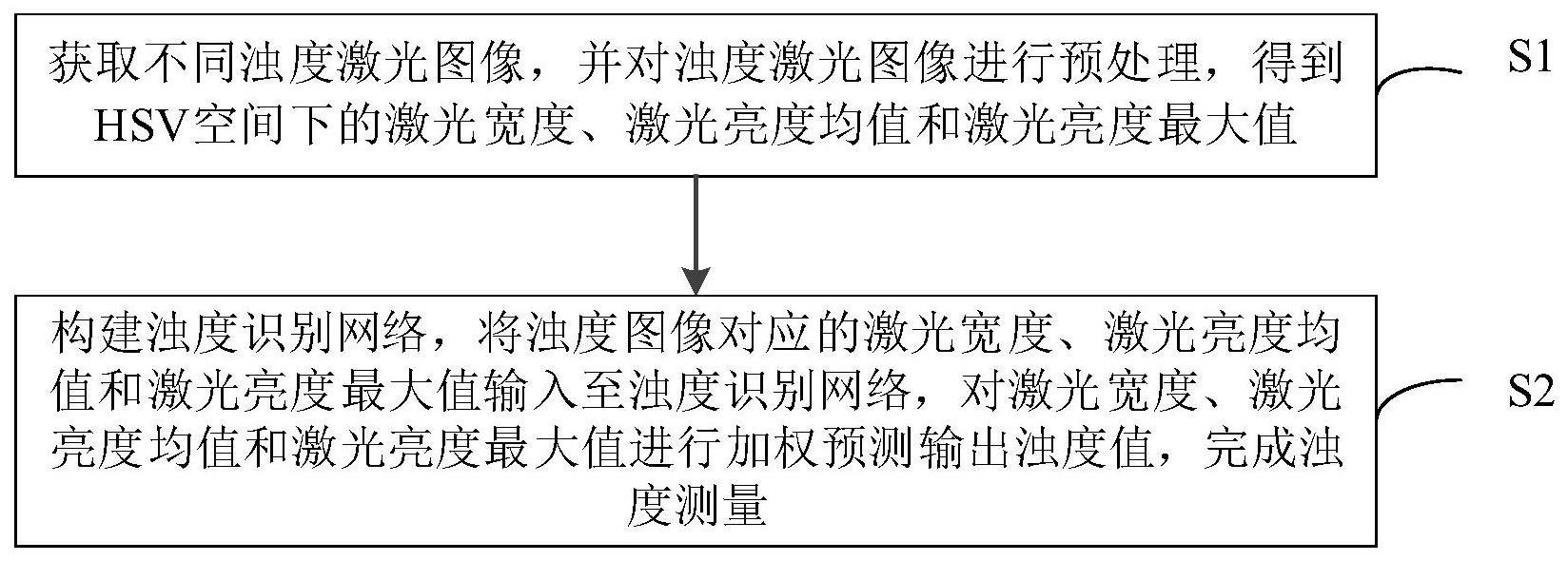
3、步骤s1,获取不同浊度激光图像,并对浊度激光图像进行预处理,得到hsv空间下的激光宽度、激光亮度均值和激光亮度最大值;
4、步骤s2,构建浊度识别网络,将浊度图像对应的激光宽度、激光亮度均值和激光亮度最大值输入至浊度识别网络,对激光宽度、激光亮度均值和激光亮度最大值进行加权预测输出浊度值,完成浊度测量。
5、根据本发明实施例第二方面,提供了一种基于激光图像特征的浊度测量装置,用于实现上述的基于激光图像特征的浊度测量方法,所述装置包括:玻璃缸,所述玻璃缸用于放置待测液体;所述玻璃缸的内壁四周设置有遮光纸,在玻璃缸的一侧开有成像口;在成像口处,布置有固定平台,在固定平台上安装有光源和相机;所述相机将激光图像上传至数据处理器,通过数据处理器存储待测液体的激光图像,并判定待测液体的浊度。
6、根据本发明实施例第三方面,提供了一种电子设备,包括存储器和处理器,所述存储器与所述处理器耦接;其中,所述存储器用于存储程序数据,所述处理器用于执行所述程序数据以实现上述的基于激光图像特征的浊度测量方法。
7、根据本发明实施例第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现上述的基于激光图像特征的浊度测量方法。
8、与现有技术相比,本发明的有益效果为:本发明提供了一种基于激光图像特征的浊度测量方法,直接通过拍摄得到的激光图像来获取浊度信息,减小了等待检测结果的时间,满足低成本、高速准确的要求,同时还适合于测量高浊度的情况。且本发明获取的激光图像的装置结构简单,成本较低。
技术特征:
1.一种基于激光图像特征的浊度测量方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于激光图像特征的浊度测量方法,其特征在于,对浊度激光图像进行预处理,得到hsv空间下的激光宽度、激光亮度均值和激光亮度最大值包括:
3.根据权利要求1所述的基于激光图像特征的浊度测量方法,其特征在于,所述浊度识别网络为bp神经网络架构,激活函数为sigmoid函数。
4.根据权利要求1所述的基于激光图像特征的浊度测量方法,其特征在于,所述步骤s2还包括对浊度识别网络进行训练。
5.一种基于激光图像特征的浊度测量装置,其特征在于,用于实现权利要求1-4任一项所述的基于激光图像特征的浊度测量方法,所述装置包括:玻璃缸(3),所述玻璃缸(3)用于放置待测液体;所述玻璃缸(3)的内壁四周设置有遮光纸(4),在玻璃缸(3)的一侧开有成像口;在成像口处,布置有固定平台(7),在固定平台(7)上安装有光源(1)和相机(2);所述相机(2)将激光图像上传至数据处理器(6),通过数据处理器(6)存储待测液体的激光图像,并判定待测液体的浊度。
6.根据权利要求5所述的基于激光图像特征的浊度测量装置,其特征在于,光源(1)采用绿色线激光。
7.根据权利要求5所述的基于激光图像特征的浊度测量装置,其特征在于,相机(2)采用自动变焦相机。
8.根据权利要求5所述的基于激光图像特征的浊度测量装置,其特征在于,待测液体的表面铺满泡沫(5)。
9.一种电子设备,包括存储器和处理器,其特征在于,所述存储器与所述处理器耦接;其中,所述存储器用于存储程序数据,所述处理器用于执行所述程序数据以实现上述权利要求1-4任一项所述的基于激光图像特征的浊度测量方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1-4中任一所述的基于激光图像特征的浊度测量方法。
技术总结
本发明提供了一种基于激光图像特征的浊度测量方法与装置,包括:步骤S1,获取不同浊度激光图像,并对浊度激光图像进行预处理,得到HSV空间下的激光宽度、激光亮度均值和激光亮度最大值;步骤S2,构建浊度识别网络,将浊度图像对应的激光宽度、激光亮度均值和激光亮度最大值输入至浊度识别网络,对激光宽度、激光亮度均值和激光亮度最大值进行加权预测输出浊度值,完成浊度测量。本发明满足低成本、高速准确的要求,同时还适合于测量高浊度的情况。
技术研发人员:宋宏,汪孟杰,唐珉珂,李梓欣,李晓冰,翁俊康,汪樵风,黄慧
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!