一种采用宽光谱光源的三角激光测量模型的制作方法
本发明属于光测量,尤其是指一种采用宽光谱光源的三角激光测量模型。
背景技术:
1、三角激光测量方法是普遍的一种3d光学测量方式,具有成本低、效率高等优势。然而三角激光测量对于光源的要求较高,其采用准直激光(窄光谱,光谱宽度小于10nm)作为光源,光束的发散角非常小,这就导致对镜面反射物体成像不佳的问题。因为光束发散角小,反射光能量随角度变化十分敏感,对于成像质量和能量探测不利。
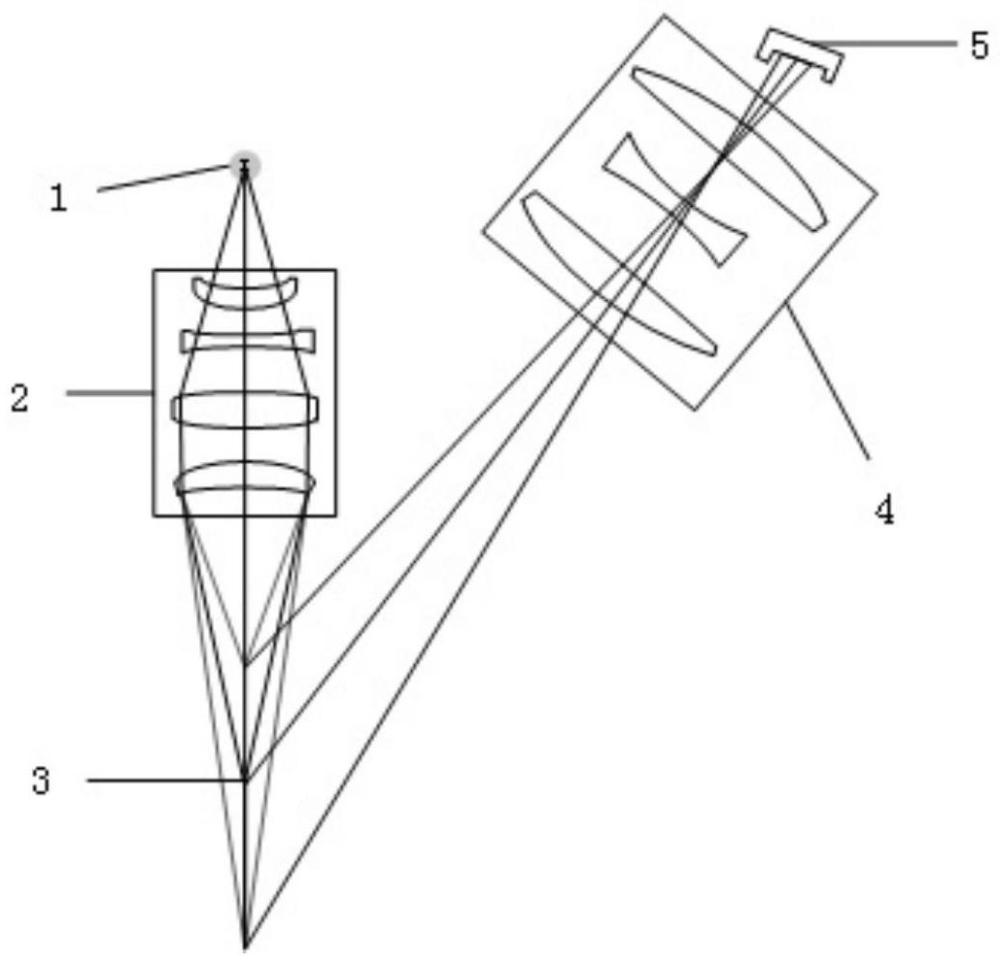
2、光谱共焦成像测量方法是一种新型的3d光学测量方式,具有成像质量好、测量精度高的优势。并且,由于光谱共焦使用的是聚焦光束而非准直光束,其角度兼容性和成像质量较好。其光谱共焦传感器的接收镜头和发射镜头相同,可以补偿发射镜头的色散,然后再用光谱仪分析反射光的光谱,从而计算反射物体的高度,如图1所示。但是光谱共焦模型采用的是色散共焦加光谱测量的方案,光路十分复杂,光谱仪的设置也导致体积较大成本较高。一般的光谱共焦的产品,售价达到三角激光的三倍以上。
3、宽光谱,通常是指光谱宽度大于10nm的光谱,区别于小于10nm的窄光谱,宽光谱的获取条件相对更容易,因此根据上述缺陷,本发明人提出一种基于宽光谱的三角激光测量技术。
技术实现思路
1、本发明的目的在于提供一种采用宽光谱光源的三角激光测量模型,具有容忍角大、兼容性高、测量精度高的特点,大大减少体积和成本。
2、为达成上述目的,本发明的解决方案为:一种采用宽光谱光源的三角激光测量模型,包括:
3、宽光谱光源,发出发散光束;
4、色散镜头,将发散光束不同颜色的色光聚焦到被测物面的不同高度以形成聚焦光束;
5、被测物面,将聚焦光束呈一角度反射到高分辨率成像镜头;
6、高分辨率成像镜头,将反射光束聚焦到成像探测器上成像;
7、成像探测器及数据处理系统,将光信号转换为电信号并产生3d测量所需的被测物面的高度。
8、作为优选方案,所述宽光谱光源为点光谱,所述成像探测器为线阵探测器。
9、作为优选方案,所述色散镜头将宽光谱光源发出的光进行色散处理,所述高分辨率成像镜头为不含色散的普通成像镜头。
10、作为优选方案,所述被测物面位于色散镜头和高分辨率成像镜头之间。
11、作为优选方案,所述成像探测器及数据处理系统位于高分辨率成像镜头的焦面。
12、采用上述方案后,本发明的增益效果在于:
13、由于宽光谱光源发出的光是色散的会聚光束,不同波长的光会聚在不同高度,这样每一个高度都有一个会聚波长的光,物体反射的主要波长就是这个会聚波长。由于不同波长的光束都具有会聚性,因此光束在不同高度光束宽度变化不大。这样就解决了会聚光束在离焦状态下光束变宽的问题,使得该测量模型在较大高度范围内都能保持较好的测量精度。
14、现有技术中,光谱共焦传感器的接收镜头和发射镜头相同,可以补偿发射镜头的色散,然后再用光谱仪分析反射光的光谱,从而计算反射物体的高度。而本发明接收端采用三角激光的接收镜头,而并非采用光谱测量的方式,且接收端采用普通镜头,无需补偿色散,直接成像,并且后端无需光谱仪,实现了光路的简化。这样系统的结构相对简单,可以大大减少体积和成本。
15、与现有技术相比,本发明的优势还在于:
16、宽光谱光束具有一定的发散角,这样即使在被测目标表面发生镜面反射,反射光束也具有一定发散角,减小了测量模型的角度敏感性,提升了模型对于镜面反射目标的探测能力。对于漫反射目标,这种宽光谱照明方式仍然存在优势,即提升了测量模型对于弯曲及倾斜表面的探测能力。相比于线激光系统,该系统容忍角较大测量精度较高。相比于光谱共焦系统,该系统可以大大减少体积和成本。这样的结构结合了光谱共焦和三角激光的优点,并且克服了两者的缺点,可以扩大测量系统的应用场景和范围。
技术特征:
1.一种采用宽光谱光源的三角激光测量模型,其特征在于:包括:
2.如权利要求1所述的一种采用宽光谱光源的三角激光测量模型,其特征在于:所述宽光谱光源为点光谱,所述成像探测器为线阵探测器。
3.如权利要求1所述的一种采用宽光谱光源的三角激光测量模型,其特征在于:所述色散镜头将宽光谱光源发出的光进行色散处理,所述高分辨率成像镜头为不含色散的普通成像镜头。
4.如权利要求1所述的一种采用宽光谱光源的三角激光测量模型,其特征在于:所述被测物面位于色散镜头和高分辨率成像镜头之间。
5.如权利要求1所述的一种采用宽光谱光源的三角激光测量模型,其特征在于:所述成像探测器及数据处理系统位于高分辨率成像镜头的焦面。
技术总结
本发明公开一种采用宽光谱光源的三角激光测量模型,包括宽光谱光源、色散镜头、被测物面、高分辨率成像镜头、成像探测器及数据处理系统;宽光谱光源发出发散光束,色散镜头将不同颜色的色光聚焦到被测物面不同高度,被测物面将聚焦光束反射到高分辨率成像镜头,反射光束聚焦到成像探测器及数据处理系统,产生3D测量所需的数据。相比于线激光系统,该模型容忍角较大测量精度较高。相比于光谱共焦系统,该系统可以大大减少体积和成本。这样的结构结合了光谱共焦和三角激光的优点,并且克服了两者的缺点,可以扩大测量系统的应用场景和范围。
技术研发人员:刘浩伟,张春
受保护的技术使用者:宁德微图智能科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!