基于小波模极大值的侧扫声呐图像的海底线检测方法与流程
本发明涉及海洋测绘,具体涉及一种基于小波模极大值的侧扫声呐图像的海底线检测方法。
背景技术:
1、侧扫声呐作为一种能够获取高分辨率的海底地形地貌影像的海洋探测设备,其声呐图像被广泛应用于地形地貌探测、水下目标物与障碍物探测、底质类型探测等海洋工程领域,也有学者将侧扫声呐图像应用于海底底质分类、地形反演、图像解译等领域,高分辨率的声呐影像在海洋探测与资源开发中发挥着重要作用。为了满足目标准确探测和识别等深层次的应用要求,需要对侧扫声呐图像进行处理分析解译,其中侧扫声呐图像的海底线作为图像预处理中的几何校正以及辐射校正的参考线,是图像中一切目标物精确定位的基准线。因此,准确定位出声呐图像上的海底线显得尤为重要,影响着侧扫声呐最终解译成图质量。目前侧扫声呐图像处理的商业软件(如sonarweb、trition等)进行海底线检测时一般采用的是阈值控制法,根据实时海底环境以及声呐图像质量对幅度阈值参数、连续性参数、高度阈值以及ping均值等参数进行手动调节,相对而言较为复杂并且会受到人为因素的影响。张济博等根据声呐瀑布图的特点,利用log算子在图像边缘检测中的应用,提出基于log算子的海底线检测方法,但是对原始声呐图像的质量要求较高,在含有噪声的情况下检测效果不佳。赵建虎等将kalman滤波和海底线最后峰法结合,提出了一种海底线自适应综合检测的方法,对含有噪声的声呐图像进行海底线跟踪检测,但是核心原理是基于第一次海底回波比其他干扰回波晚返回的推断,当干扰回波强度大于海底回波时则缺乏一定通用性。王爱学等基于海底线空间分布特征提出点密度聚类与链搜索相结合的海底线检测方法,能够在复杂的水环境下进行海底线跟踪,但是需要选取可能为海底线的点,算法实现较为复杂。其中基于小波变换的边缘检测方法在对图像的应用中已经很成熟了,但是在声呐图像处理中的应用相对较少,特别是对应用在侧扫声呐图像的海底线检测中,缺少相关的实验数据。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术的不足,提供一种基于小波模极大值的侧扫声呐图像的海底线检测方法,对图像中的噪声抑制更为高效,检测结果更加准确。
2、本发明的技术方案为:
3、一种基于小波模极大值的侧扫声呐图像的海底线检测方法,包括如下步骤:
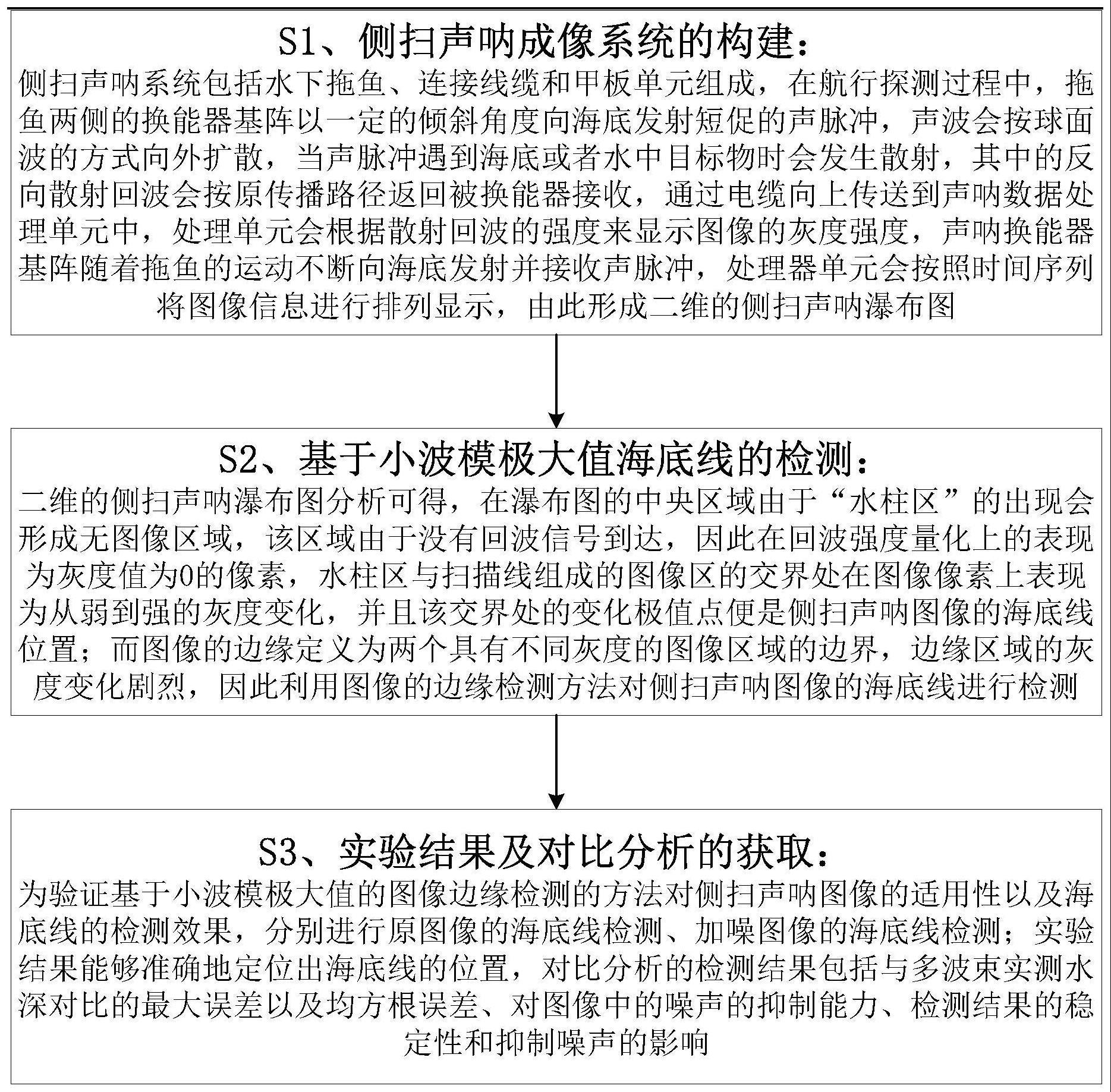
4、s1、侧扫声呐成像系统的构建:侧扫声呐系统包括水下拖鱼、连接线缆和甲板单元组成,在航行探测过程中,拖鱼两侧的换能器基阵以一定的倾斜角度向海底发射短促的声脉冲,声波会按球面波的方式向外扩散,当声脉冲遇到海底或者水中目标物时会发生散射,其中的反向散射回波会按原传播路径返回被换能器接收,通过电缆向上传送到声呐数据处理单元中,处理单元会根据散射回波的强度来显示图像的灰度强度,声呐换能器基阵随着拖鱼的运动不断向海底发射并接收声脉冲,处理器单元会按照时间序列将图像信息进行排列显示,由此形成二维的侧扫声呐瀑布图;
5、s2、基于小波模极大值海底线的检测:二维的侧扫声呐瀑布图分析可得,在瀑布图的中央区域由于“水柱区”的出现会形成无图像区域,该区域由于没有回波信号到达,因此在回波强度量化上的表现为灰度值为0的像素,水柱区与扫描线组成的图像区的交界处在图像像素上表现为从弱到强的灰度变化,并且该交界处的变化极值点便是侧扫声呐图像的海底线位置;而图像的边缘定义为两个具有不同灰度的图像区域的边界,边缘区域的灰度变化剧烈,因此利用图像的边缘检测方法对侧扫声呐图像的海底线进行检测;
6、s3、实验结果及对比分析的获取:为验证基于小波模极大值的图像边缘检测的方法对侧扫声呐图像的适用性以及海底线的检测效果,分别进行原图像的海底线检测、加噪图像的海底线检测;实验结果能够准确地定位出海底线的位置,对比分析的检测结果包括与多波束实测水深对比的最大误差以及均方根误差、对图像中的噪声的抑制能力、检测结果的稳定性和抑制噪声的影响。
7、优选地,所述步骤s1中,二维的侧扫声呐瀑布图包括航迹线、海底线以及扫描线,其中:
8、航迹线,表征为拖鱼的运动轨迹,也是用来量取拖鱼到海底目标距离的基准线;
9、海底线,表征为拖鱼至水底的高度,反映了拖鱼正下方的海底地形起伏变化,是斜距改正、辐射校正以及目标量测的基准线;航迹线与海底线之间的图像部分被称为“水柱区”,是声呐基阵到达海底的第一个回波位置,由于在该位置前没有接收到回波,因此“水柱区”在声呐图像上显示为全黑像素;
10、扫描线,是侧扫声呐图像的组成部分,每ping扫描线有序排列组成海底声呐图像,该部分图像的像素灰度变化是声呐处理单元根据接收到的信号强弱进行处理显示,反映出目标特征以及地形地貌特征。
11、优选地,所述步骤s1中,迎声波照射面的海底目标反向散射强度较强,在声呐图像上呈现较强灰度像素,而背向声波照射面的反射强度较弱或者无反射,呈现出弱灰度的黑色像素。
12、优选地,所述步骤s2中,基于小波模极大值海底线的检测包括如下小步:
13、s211、输入由xtf文件中解析出来的侧扫声呐图像,截取合适的尺寸;
14、s212、设置小波的尺度系数s,构建平滑函数,实验中选取高斯函数作为平滑函数,定义滤波器长度以及幅度值,利用平滑函数对图像中像素的x以及y方向求取导数,并做能量归一化处理,再对平滑后图像做行列卷积处理,求取小波系数;
15、s213、遍历平滑后的原图像,求取出每一个像素点的梯度方向以及幅角;
16、s214、针对像素点(xi,yj)的8个领域点,将幅角划分为4个方向,即像素点(xi,yj)的水平、竖直、45°或者225°、135°或者315°四个方向,将图像分别沿各自的相角方向求取出局部模极大值,如果是极大值则记录梯度值,不是的则将梯度赋值为零;
17、s215、求出最大的幅值,找到所有模极大值点的梯度最大值,将最大梯度值作为归一化参照值;
18、s216、设置合适的阈值,去除由于噪声引起的虚假边缘,大于阈值的保留,反之小于的则删除,对图像中的边缘点进行链接,得到图像的边缘信息,定位出侧扫声呐图像海底线的位置。
19、优选地,所述步骤s2中,基于小波模极大值的边缘检测方法,包括如下具体小步:
20、设二维图像函数f(x,y),选取合适的二维平滑函数θ(x,y),该函数具有良好的局部化特性,即需要满足以下条件:
21、
22、引入尺度参数s=2j,在该尺度参数下对原图像进行平滑:
23、
24、并记在尺度s下的水平以及竖直小波函数为:
25、
26、因此图像f(x,y)在尺度s下的二维小波变换可以表示为:
27、
28、即的梯度矢量的模值与小波变换的模值数量关系为:
29、
30、梯度方向与水平方向的夹角即为相角:
31、
32、根据小波模极大值的算法原理,得出计算光滑函数沿梯度方向的模极大值相当于计算小波变换的模极大值,记为则单位矢量与梯度矢量是相平行的,因此在尺度s下,若模沿着与相垂直的方向取得局部最大值,则点(x,y)就是平滑图像函数的一个边缘点;
33、通过检测二维小波变换的模极大值点来确定图像的边缘点,同时检测出侧扫声呐图像中水柱区域与扫描区域交界线,实现对海底线的检测。
34、优选地,所述步骤s3中,实验过程中与阈值法、基于log算子的海底线检测方法作对比,并设置最大误差以及均方根误差两个参数作为定量分析依据,其中:
35、最大误差,表示检测结果与实际值的最大差值,最大值越小,说明检测结果越好;
36、均方根误差,表示检测结果与实际值的偏差程度,均方根误差越小,说明检测结果整体越接近实际值;
37、并且针对侧扫声呐系统在实际工作的过程中,会受到各种海底噪声的影响,因此在实验过程中,分析各噪声对声呐成图的影响程度,在原始侧扫声呐图像的基础上添加了影响效果最大的斑点噪声,以模拟侧扫声呐图像受到噪声时的影响,再次比较各方法对加噪侧扫声呐图像的海底线检测结果,分析各方法的检测效果以及对噪声的抑制能力。
38、优选地,优选地,所述步骤s3中,原图像的海底线检测,包括如下小步:
39、将3dss-dx声呐扫测的实验区域的测深数据作为实测水深值,用于各方法检测结果的误差分析基准:
40、阈值法,对声呐图像检测的结果,实验中将阈值k设置为0.5,海底线检测结果最理想;检测过程中会把噪点当作海底线,对生成的海底线进行滤波平滑操作,消除干扰因素的影响;
41、log算子方法,对于海底线位置的定位不相同,在海底高度落差较大的地方相差较为明显。
42、优选地,所述步骤s3中,加噪图像的海底线检测:包括如下小步:
43、在实验过程中往原侧扫声呐图像中添加了均值为0,噪声标准差为0.06的高斯白噪声,模拟混响噪声对声呐图像的影响,来对比各海底线检测方法对噪声因素的抑制能力;为原侧扫声呐图像以及添加噪声后的声呐图像,两者对比明显发现在添加噪声后,侧扫声呐图像在分辨率上有所下降,边界变得模糊,整张声呐图像清晰度变低,可读性变差。
44、本发明与现有技术相比,具有以下有益效果:
45、本发明将基于小波模极大值的图像边缘检测方法应用于侧扫声呐图像的海底线检测中,对比分析了阈值法以及基于微分log算子法的检测效果,并且为了进一步验证本发明在更为复杂的实际海洋工作环境中的适用性,在声呐图像中添加噪声以模拟真实海底环境下的海底线检测。实验结果表明,本发明能够准确地从侧扫声呐图像中检测出海底线,可以有效地抑制图像噪声对检测结果的影响,检测定位精度达到了0.2m左右的均方根误差,相较于其他的海底线检测方法,精度更高,检测结果更加稳定,可以为获取高分辨的侧扫声呐图像提供保障。
- 还没有人留言评论。精彩留言会获得点赞!