一种基于视觉的激光投影系统精度验证方法与流程
本发明涉及激光投影,具体而言,涉及一种基于视觉的激光投影系统精度验证方法、系统、电子设备及计算机存储介质。
背景技术:
1、激光投影系统目前都是采用标准工装cds(circle diamond square)方法实现对激光投影系统精度的验证,但是,该方法本质上是部分定量+部分定性的精度验证方法,所得出的精度验证结果并非完全精确。如,cds中对激光线线宽的测量均是通过人眼结合卡尺等量具目测得到,准确度不高,人为误差较大。
技术实现思路
1、为了至少解决上述背景技术中存在的技术问题,本发明提供了一种基于视觉的激光投影系统精度验证方法、系统、电子设备及计算机存储介质。
2、本发明的第一方面提供了一种基于视觉的激光投影系统精度验证方法,包括如下步骤:
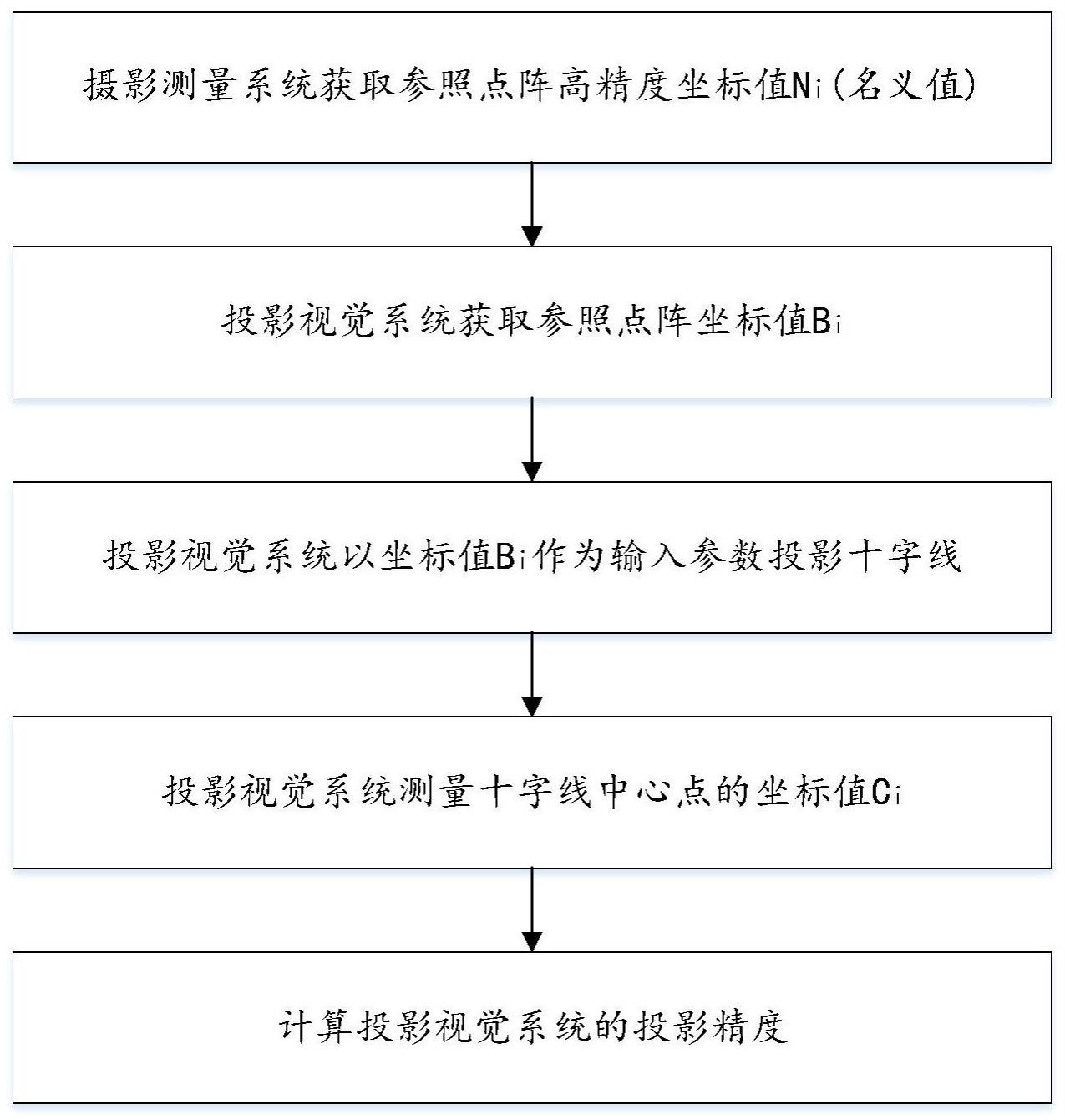
3、获取参照点阵名义值;
4、基于投影视觉系统获取参照点阵中心坐标实测值集合;
5、基于所述参照点阵名义值和所述参照点阵中心坐标实测值集合计算得出激光投影系统的精度。
6、可选地,所述获取参照点阵名义值,包括:
7、采用高精度的摄影测量系统拍摄参照点阵a,得出参照点阵a中每个参照点中心坐标值ni(xi,yi,zi)。
8、可选地,所述基于投影视觉系统获取参照点阵中心坐标集合,包括:
9、投影视觉系统采集参照点阵a;
10、投影系统计算得出所述参照点阵a的每个参照点的中心坐标实测值集合b;
11、投影系统将集合b以十字交叉激光线的形式投射到所述参照点阵a上;
12、投影视觉系统采集投射到点阵a中每个参照点中心的十字交叉激光线;
13、投影视觉系统对每个参照点的十字交叉激光线进行提取并计算得到投射出来的参照点阵中心坐标集合c。
14、可选地,所述基于所述参照点阵名义值和所述参照点阵中心坐标集合计算得出激光投影系统的精度,包括:
15、采用如下方式计算激光投影系统的精度:
16、ni与bi进行坐标对齐,得到坐标变换参数s,r,t;
17、对ni进行坐标变换得到n′i,n′i与bi处于同一坐标系,变换公式为n′i=srni+t;
18、计算bi与n′i的平均偏差值:作为视觉系统的测量精度;
19、计算ci与n′i的平均偏差值:作为投影系统的投影精度;
20、可多次、多位置测量再取平均;
21、投影系统在同一位置、同一姿态可采集多组坐标值与名义值比较,可以得到投影系统的重复精度;
22、投影系统同时可以计算得到投影系统投射出的激光线宽度实际值。
23、可选地,所述对每个参照点的十字交叉激光线进行提取并计算得到投射出来的参照点阵中心坐标,包括:
24、对输入图像做高斯模糊处理;对图像做二值化处理,提取白色区域;提取白色区域的边界轮廓线,计算区域内每个点到轮廓线的最短距离;提取距离值最显著的区域;计算中心区域的重心作为十字线中心点的坐标。
25、可选地,所述对每个参照点的十字交叉激光线进行提取并计算得到投射出来的参照点阵中心坐标,包括:
26、对输入图像做高斯模糊处理;根据图像灰度的梯度值提取轮廓线;轮廓线中筛选出竖直方向的线段;在轮廓线中筛选出水平方向的线段;水平和竖直方向线段分别配对后拟合直线;水平和竖直方向直线分别配对后计算中心线,两条中心线的交点作为十字线中心点的坐标。
27、本发明的第二方面提供了一种基于视觉的激光投影系统精度验证系统,包括处理模块、存储模块、获取模块,所述处理模块分别与所述存储模块和所述获取模块连接;其中,
28、所述存储模块,用于存储可执行的计算机程序代码;
29、所述获取模块,用于获取参照点阵名义值和参照点阵中心坐标集合,并传输给所述处理模块;
30、所述处理模块,用于通过调用所述存储模块中的所述可执行的计算机程序代码,执行如前任一项所述的方法。
31、本发明的第三方面提供了一种电子设备,包括:存储有可执行程序代码的存储器;与所述存储器耦合的处理器;所述处理器调用所述存储器中存储的所述可执行程序代码,执行如前任一项所述的方法。
32、本发明的第四方面提供了一种计算机存储介质,该存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上任一项所述的方法。
33、本发明的有益效果在于:
34、与cds方法相比,本发明的方案完全定量描述了投影系统的精度;而且,目前行业内没有对投影系统重复精度定量验证的方法,而本发明提供了投影系统重复精度验证的方法,填补了技术空白。
技术特征:
1.一种基于视觉的激光投影系统精度验证方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于视觉的激光投影系统精度验证方法,其特征在于:所述获取参照点阵名义值,包括:
3.根据权利要求1所述的一种基于视觉的激光投影系统精度验证方法,其特征在于:所述基于投影视觉系统获取参照点阵中心坐标实测值集合,包括:
4.根据权利要求3所述的一种基于视觉的激光投影系统精度验证方法,其特征在于:所述基于所述参照点阵名义值和所述参照点阵中心坐标实测值集合计算得出激光投影系统的精度,包括:
5.根据权利要求4所述的一种基于视觉的激光投影系统精度验证方法,其特征在于:所述对每个参照点的十字交叉激光线进行提取并计算得到投射出来的参照点阵中心坐标,包括:
6.根据权利要求4所述的一种基于视觉的激光投影系统精度验证方法,其特征在于:所述对每个参照点的十字交叉激光线进行提取并计算得到投射出来的参照点阵中心坐标,包括:
7.一种基于视觉的激光投影系统精度验证系统,包括处理模块、存储模块、获取模块,所述处理模块分别与所述存储模块和所述获取模块连接;其中,
8.一种电子设备,包括:存储有可执行程序代码的存储器;与所述存储器耦合的处理器;其特征在于:所述处理器调用所述存储器中存储的所述可执行程序代码,执行如权利要求1-6任一项所述的方法。
9.一种计算机存储介质,该存储介质上存储有计算机程序,其特征在于:该计算机程序被处理器运行时执行如权利要求1-6任一项所述的方法。
技术总结
本发明提供了一种基于视觉的激光投影系统精度验证方法,属于激光投影技术领域;所述方法包括:获取参照点阵名义值;基于投影视觉系统获取参照点阵中心坐标实测值集合;基于所述参照点阵名义值和所述参照点阵中心坐标实测值集合计算得出激光投影系统的精度。本发明的方案可完全定量描述基于视觉投影系统的精度。此外,本发明可以同时计算得到投影系统投射出的激光线宽度实际值。
技术研发人员:刘俊峰,王彦斌,潘雄
受保护的技术使用者:德特克(上海)数字技术有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!