一种农田氮素地下淋溶监测机器人系统及方法
本发明涉及生态环境保护技术,特别是涉及到一种农田氮素地下淋溶监测机器人系统及方法。
背景技术:
1、氮素是植物生长过程中必需的营养元素,对于农作物的生长发育有着重要的影响。因此,在农业生产中,农民会使用化肥来补充土壤中缺失的氮素元素,以提高农作物的产量和质量。但是,化肥中的氮素成分往往不能被植物完全吸收利用,一部分氮素会随着雨水和灌溉水的冲刷、地下水的流动和渗漏等方式进入到地下水体中,导致地下水中氮素含量超标,引发环境和健康问题。
2、目前,农业氮素淋溶的问题已经引起了广泛的关注和重视。根据全国土壤污染状况调查结果显示,农田土壤中氮素污染是全国土壤污染的主要类型之一,其中约有1/4的农田土壤存在氮素污染问题。同时,由于氮素淋溶问题的存在,地下水中氮素含量超标也成为了当前环境保护的重要问题之一。据统计,全国地下水中氮素含量超标的地区已经超过1/3,其主要分布区域以东部地区和北方平原地区为主。
3、氮素污染不仅对人类健康和生态环境造成了严重的危害,而且也给农业生产和农产品的质量带来了很大的挑战。氮素超标会导致农产品中毒素含量过高,严重影响人们的健康和安全。此外,氮素的大量流失还会造成土壤肥力的丧失,导致土地的退化和耕地质量下降。
4、因此,解决氮素淋溶污染问题已经成为当前环保和农业生产中的重要任务之一。建立智能化的农田氮素地下淋溶监测系统,可以及时发现和处理氮素超标的情况,帮助农民科学施肥,减少氮素的流失和污染,保护地下水资源和生态环境的可持续发展。
5、传统的氮素淋溶液监测方法通常有静态淋溶液收集方法、动态淋洗法、根际液体收集法、微型土柱淋洗法、采样淋洗法。
6、1.静态淋溶液收集方法是指在农田里设立淋溶液收集装置,收集一定时间内的淋溶液样品,然后对淋溶液样品中的氮素含量进行检测分析。该方法需要在田间设置收集装置,会对土地造成一定的影响。
7、2.动态淋洗法通过喷淋或渗漏装置向土壤中灌注一定量的水,收集经过土壤淋洗的水样进行分析。这种方法操作复杂,需要设置灌溉装置和收集装置,费用较高。
8、3.根际液体收集法通过人工挖掘和设置根际液体采样管,在根际土壤内收集根际液体样品,然后对样品中的氮素含量进行检测分析。这种方法操作复杂,需要挖掘和设置采样管,成本高。
9、4.微型土柱淋洗法是将将采集的土壤样品装填在微型土柱中,然后通过喷淋或渗漏装置向土柱中灌注一定量的水,收集经过土柱淋洗的水样进行分析。该方法需要大量土壤样品,且操作复杂。
10、5.采样淋洗法是将土壤样品放置到淋洗装置中,再往土壤样品中加定量水,然后再收集淋溶液进行分析。该方法对土壤的破坏大,容易造成二次污染。
11、因此,目前氮素淋溶监测方法常采用现场采样和实验室分析相结合的方法,耗时耗力且无法实现实时检测。少部分采用固定式检测的方法,该方法采用固定采样点安装大容积淋溶桶后提取淋溶液,并通过管道运送至淋溶液检测终端实现氮素淋溶监测,需要在多个采样点铺设多个大容积淋溶桶和管道,前期建设成本高,对土壤环境破坏大,处理过程复杂。
技术实现思路
1、本发明为解决现有技术中氮素淋溶监测方法常采用现场采样和实验室分析相结合的方法,耗时耗力且无法实现实时检测。少部分采用固定式检测的方法,该方法采用固定采样点安装大容积淋溶桶后提取淋溶液,并通过管道运送至淋溶液检测终端实现氮素淋溶监测,需要在多个采样点铺设多个大容积淋溶桶和管道,前期建设成本高,对土壤环境破坏大,处理过程复杂的技术问题,提出了一种农田氮素地下淋溶监测机器人系统及方法,该机器人系统通过移动式的方法完成大范围农田土壤多点、多层深度的淋溶液自动提取后,智能化对提取的淋溶液进行全流程的实时检测和分析,不依赖于人工采集与实验室分析。
2、为了实现这一目标,本发明采取了如下的技术方案。
3、一种农田氮素地下淋溶监测机器人系统,地下淋溶监测机器人系统包括云平台、监测机器人和淋溶液采集模块,其中,
4、云平台用于向监测机器人发送待测地点、待测深度信息,以及接收监测机器人的测量信息;
5、监测机器人用于移动至待测地点,与位于待测地点、待测深度的淋溶液采集模块对接,提取淋溶液采集模块的淋溶液,并进行淋溶液的淋溶液氮素检测,并将淋溶液氮素检测结果发送至云平台。
6、另外,本发明的农田氮素地下淋溶监测机器人系统中,待测地点包括多个,每个待测地点包括一个以上待测深度;云平台中包括路径规划单元,路径规划单元根据多个待测地点的位置关系以及各个待测地点的待测深度数量,规划监测机器人的检测移动轨迹,并将检测移动轨迹发送至监测机器人;监测机器人接收到检测移动轨迹,根据检测移动轨迹,对每个待测地点以及每个待测深度依次进行淋溶液氮素检测。
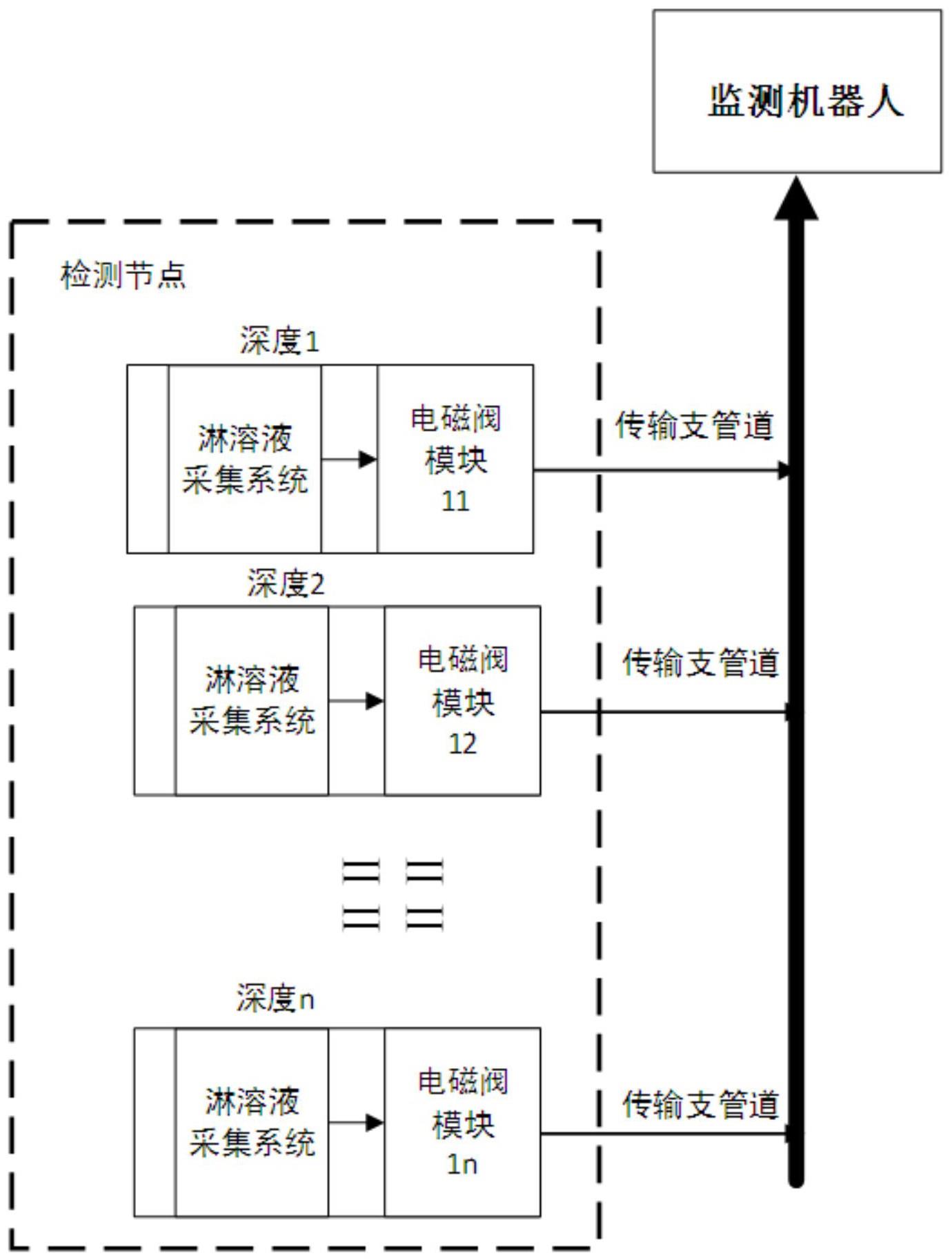
7、另外,本发明的农田氮素地下淋溶监测机器人系统中,待测地点、待测深度处具有淋溶液采集模块,淋溶液采集模块包括淋溶液采集系统,电磁阀模块、传输支管道和zigbee模块;其中淋溶液采集系统用于在待测地点处的待测深度收集淋溶液,电磁阀模块连接淋溶液采集系统和传输支管道,zigbee模块连接至电磁阀模块,以及通过无线方式连接至监测机器人的zigbee基站模块,用于根据zigbee基站模块发送的指令,开启或关闭电磁阀模块。
8、另外,本发明的农田氮素地下淋溶监测机器人系统中,监测机器人包括zigbee基站模块、淋溶液管道对接模块和淋溶液提取驱动模块;待测地点包括一个以上待测深度,每个待测深度具有淋溶液采集模块,淋溶液采集模块包括淋溶液采集系统、电磁阀模块、传输支管道和zigbee模块;
9、监测机器人包括zigbee基站模块与每个待测深度处淋溶液采集模块zigbee模块无线连接,淋溶液管道对接模块与每个待测深度处淋溶液采集模块的传输支管道连接;用于依次利用zigbee基站模块与每个待测深度处淋溶液采集模块的zigbee模块通信,开启每个待测深度处淋溶液采集模块的电磁阀模块,从每个待测深度处淋溶液采集模块的传输支管道抽取淋溶液,并对每个待测深度处进行淋溶液氮素检测;其中对于一个待测深度进行淋溶液抽取时,仅开启该待测深度处淋溶液采集模块的电磁阀模块;保持其他待测深度处淋溶液采集模的电磁阀模块处于关闭状态。
10、另外,本发明的农田氮素地下淋溶监测机器人系统中,监测机器人包括移动模块,移动模块包括导航模块、移动载体和移动载体驱动单元,导航单元用于检测监测机器人的位置,移动载体包括轮式移动平台和电机,移动载体驱动单元用于控制移动载体的移动方向和移动距离。
11、另外,本发明的农田氮素地下淋溶监测机器人系统中,监测机器人包括环境感知模块,环境感知模块包括温湿度传感器、风向传感器、降雨量传感器和光照强度传感器,监测机器人将环境感知模块采集的温度、湿度、风向、降雨量和光照强度信息,与淋溶液氮素检测结果一起发送至云平台。
12、另外,本发明的农田氮素地下淋溶监测机器人系统中,待测地点包括多个,每个待测地点包括一个以上待测深度,在每个待测地点的每个待测深度各有淋溶液采集模块,淋溶液采集模块包括淋溶液采集系统、淋溶液液位传感器、电磁阀模块、传输支管道和zigbee模块;淋溶监测机器人具有zigbee基站模块和动态路径规划单元;其中,
13、淋溶监测机器人收到多个待测地点,以及每个待测地点的一个以上待测深度信息后,通过zigbee基站模块向各个待测地点处各待测深度的淋溶液采集模块的zigbee模块发送启动命令,各个待测地点处各待测深度的淋溶液采集模块的淋溶液液位传感器检测各自对应的淋溶液采集系统已采集的淋溶液液位,并通过各个待测地点处各待测深度的zigbee模块向淋溶监测机器人按照预定周期发送各自对应的淋溶液采集系统采集的淋溶液液位;
14、淋溶监测机器人的动态路径规划单元根据各个淋溶液采集系统采集的淋溶液液位,以及各个待测地点的位置关系以及各个待测地点的待测深度数量,根据每个预定周期,动态规划监测机器人的检测移动轨迹;监测机器人根据动态规划的检测移动轨迹,进行各个待测地点的位置关系以及各个待测深度的淋溶液抽取和淋溶液氮素检测。
15、另外,本发明的农田氮素地下淋溶监测机器人系统中,监测机器人包括微流控制模块、淋溶液氮素检测模块、清洗模块、废液处理模块和数据处理模块,其中,微流控制模块将抽取的淋溶液加入待反应的化学试剂,并将化学试剂和淋溶液的混和液提供至淋溶液氮素检测模块进行淋溶液氮素检测,清洗模块用于一次淋溶液氮素检测完成后,利用清洗液清洗监测机器人内的微流控制模块、淋溶液氮素检测模块;废液处理模块用于排出化学试剂和淋溶液的混和液以及清洗液。
16、一种农田氮素地下淋溶监测方法,包括以下步骤:
17、a、云平台向监测机器人发送待测地点、待测深度信息;
18、b、监测机器人用于移动至待测地点,与位于待测地点、待测深度的淋溶液采集模块对接,一个待测地点的一个或多个淋溶液采集模块称为一个待测节点。监测机器人提取待淋溶液采集模块的淋溶液,并进行淋溶液的淋溶液氮素检测,并将淋溶液氮素检测结果发送至云平台。
19、另外,本发明的农田氮素地下淋溶监测方法中,步骤a中,云平台向监测机器人发送的待测地点包括多个,每个待测地点包括一个以上待测深度;步骤b中,监测机器人移动至待测地点进行淋溶液抽取和淋溶液氮素检测包括:
20、淋溶监测机器人收到多个待测地点,以及每个待测地点的一个以上待测深度信息后,通过zigbee基站模块向各个待测地点处各待测深度的淋溶液采集模块的zigbee模块发送启动命令,各个待测地点处各待测深度的淋溶液采集模块的淋溶液液位传感器检测各自对应的淋溶液采集系统已采集的淋溶液液位,并通过各个待测地点处各待测深度的zigbee模块向淋溶监测机器人按照预定周期发送各自对应的淋溶液采集系统采集的淋溶液液位;
21、淋溶监测机器人的动态路径规划单元根据各个淋溶液采集系统采集的淋溶液液位,以及各个待测地点的位置关系以及各待测地点的待测深度数量,根据每个预定周期,动态规划监测机器人的检测移动轨迹;监测机器人根据动态规划的检测移动轨迹,进行各个待测地点的位置关系以及各个待测深度的淋溶液抽取和淋溶液氮素检测。
22、本发明的技术包括如下技术效果。
23、1.本发明的农田氮素地下淋溶监测机器人及方法能够自动实现大范围多点地下淋溶液的自动化获取、智能化检测与分析。
24、2.本发明的淋溶监测机器人能够自主导航移动,至每个待测地点进行淋溶液采集和淋溶液氮素分析,这样并不需要在每个待测地点分别设计一个或多个淋溶液氮素分析装置,各个待测地点共用一个监测机器人,这样既能保证对于每个待测地点及待测深度的林溶液氮素分析的一致性,避免每台测试设备之间的个体差异,因而提高了准确性。另外,还能降低整个系统的成本,避免投入大量的淋溶液氮素分析装置。同时,因为每个淋溶液氮素分析装置需要向云平台报送测试结果信息,而本发明全部交由监测机器人来统一完成,因此可以节约功耗,避免对于每个测试地点进行电路布线。
25、3.本发明的淋溶监测机器人在淋溶液氮素检测模块前采用微流控技术,实现提取少量淋溶液就可以完成淋溶液氮素组分的检测,因此避免了在多个待测地点抽取多个测试深度的大量淋溶液氮素测量的大量时间消耗。
26、4.本发明的农田氮素地下淋溶监测机器人系统和方法可以实现对大范围多处淋溶监测节点的快速采集、检测与分析。通过基站控制程序设置,可实现无人值守式监测。通过微流控模块,实现微量淋溶液采集。成本低、检测耗时短、效率高、自动化、智能化程度高。
27、5.特别地,本发明的农田氮素地下淋溶监测机器人系统和方法为了进一步提高测试效率,还采取了动态路径规划的方式,根据各个淋溶液采集系统采集的淋溶液液位,以及各个待测地点的位置关系以及各待测地点的待测深度数量,根据每个预定周期,动态规划监测机器人的检测移动轨迹,而不用预先设置检测移动轨迹,在每个待测地点完成测量后,动态计算下一个待测地点,按照步进的方法进行路径最优化,能够避免在一个待测地点进行淋溶液采集的等待时间,因此大大提高了农田氮素地下淋溶监测机器人系统和方法对于多个待测地点和多个待测深度的整体系统测试效率。
- 还没有人留言评论。精彩留言会获得点赞!