深沟槽放坡开挖的坡度器的制作方法
本发明涉及测量设备,具体而言,涉及一种深沟槽放坡开挖的坡度器。
背景技术:
1、直埋市政管道施工的深沟槽放坡开挖危险性较大,需要严格控制开挖深度和放坡比例,同时满足管道铺设的坡度要求和作业空间要求。因受到测量校核手段、挖掘机驾驶员技术等影响,实际施工开挖深沟槽时,很难精确控制沟槽放坡比例,存在较大安全隐患。同时,沟槽开挖深度、纵向坡度、底部沟槽宽度控制较难,对管道安装作业影响很大。
2、现有技术中,主要通过全站仪、水准仪或rtk/gps放出开挖中线、沟槽顶部和底部边线,然后每隔一定距离设置坡度板,并打设中线钉和坡度钉。每开挖一层需要恢复沟槽中线和底部边线,并通过中线钉位置校核开挖方向,通过测定坡度钉高程,校核开挖深度和坡度。
3、现有技术中,需要沿线设置多组坡度板,并不断校核沟槽中线、沟底边线以及纵向坡度,费时费力。且在部分施工场景中,挖掘机驾驶员经常依靠自身施工经验,直接进行一次性放坡开挖,缺乏有效的过程控制。容易出现超挖、欠挖或放坡比例不到位的情况,致使施工进度较慢,效率较低,安全风险较大。
技术实现思路
1、本发明旨在至少解决现有技术中存在的频繁设置坡度板,费时费力、挖掘或放坡比例不到位,致使施工进度缓慢效率较低、安全风险较大的问题之一,提供一种省时省力、施工效率较高、稳定可靠的装置。
2、为此,本发明提供了一种深沟槽放坡开挖的坡度器。
3、本发明提出的深沟槽放坡开挖的坡度器,包括:
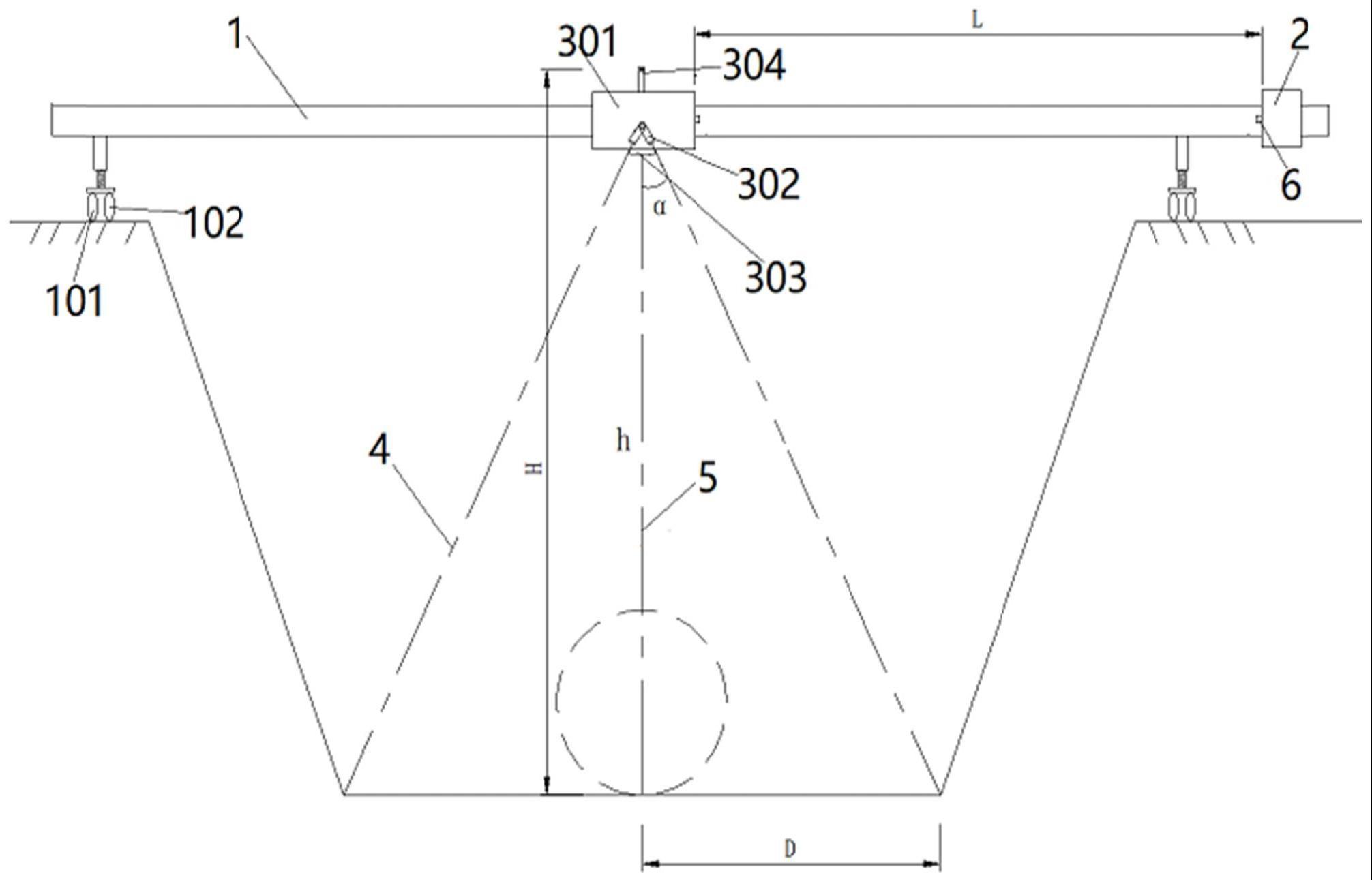
4、水平梁体,所述水平梁体搭设在沟槽两侧地基上并可进行移动,所述水平梁体一侧还设有控制器;测量投射装置,所述测量投射装置设在所述水平梁体中心位置,包括定位器及设在所述定位器上的激光投线器、测距传感器及高程信标,所述控制器可对所述定位器进行操控,从而对所述激光投线器的投射及角度进行控制。
5、本发明提出的深沟槽放坡开挖的坡度器,包括:水平梁体、控制器、测量投射装置。水平梁体可为伸缩结构,由三段管体组合而成,位于中心的管体可供各种仪器设备连接固定,两侧的管体可进行收缩,在中心管体两端还设有固定装置,以对伸缩的管体进行固定,管体上设有刻度,以便于对伸缩距离的测算。水平梁体底部焊接或可拆卸连接有行走装置,行走装置为车轮或滑轮。车轮或滑轮的尺寸有多组,以适配不同的沟槽地基。行走装置还设有锁定杆,锁定杆可对车轮或滑轮的转动进行锁定,以使水平梁体固定在沟槽地基上。测量投射装置两侧形成有通道,可供水平梁体通过,两者形成耦合或水平梁体焊接、可拆卸连接在测量投射装置两侧形成耦合。定位器上设有安装架,可对激光投线器、测距传感器、高程信标进行固定或通过螺纹连接、卡接的方式固定。控制器可通过预先输入的数据及定位器传来的数据进行换算,得出的转动角度数据在传递给定位器后,自动对激光投线器的转动角度进行调控。控制器可通过有线或无线对定位器进行控制,激光投线器的数量可设置多组,每组可进行独立操控,改变其投射角度及颜色。
6、由此可见,可进行伸缩的水平梁体,能适配不同尺寸的沟槽,整体结构可移动,可完成连续沟槽的坡度校核,使整体施工效率大幅提升,控制器通过换算后,定位器自动对激光投线器进行调控投射指示线,利用激光投线器实时指示开挖边界,避免因挖掘机驾驶员操作经验缺陷,造成的超挖、欠挖或放坡比例不到位的情况,施工的质量得以保障,安全风险大幅降低。控制器自动计算放坡边线的位置,可减少测量换算工作,省去频繁设置坡度板的过程,整体仪器操作简单,使用方便,省时省力,稳定性更高。
7、需要说明的是,本发明的原理为:
8、准备阶段,在控制器面板中输入起始位置里程桩号f0,设计埋深高程h0,设计坡度n,沟底宽度d等参数。工作时,将坡度器移动到指定位置,测定和输入里程桩号f1和信标高程h1。控制器完成如下换算工作:
9、(1)计算里程距离s=b-a,计算设计坡降δh=(f1-f0)*n。
10、(2)换算沟底深度h=h1-h0+δh-d(信标至测距仪距离);
11、(3)换算激光投线器转动角度α=arctan(d/h);
12、控制器将角度计算结果转化为电信号控制定位器4内部的步进电机转动对应角度,带动激光投线器的角盘旋转并投射坡脚指示线;测距传感器根据沟底深度数据换算数据,实时测量深度,当深度满足设计要求后,控制器发出投射信号给激光投线器,投射中线指示线。
13、根据本发明上述技术方案的深沟槽放坡开挖的坡度器,还可以具有以下附加技术特征:
14、在上述技术方案中,所述控制器与所述定位器间通过控制供电线连接,所述控制器可对沟槽的各项数据进行换算工作,将转动角度的数据传递到所述定位器,以对所述激光投线器进行操控。
15、在该技术方案中,控制供电线为控制连接线与供电线组成,水平梁体上设有套环,套环形成有两个独立的环状结构,以将控制连接线与供电线分隔开,使后续装置通电、断电更加方便。控制器上设有面板可预先输入各项初始数据,从而与后续数据进行换算,计算出转动角度,激光投线器设有多个激光头,对不同结构投射激光时,投射的光束颜色不同,以便于对投射的结构进去区分,进而提高施工效率。
16、在上述技术方案中,所述激光投线器及所述测距传感器设置在所述定位器中心位置上,所述激光投线器可投射激光线,当所述控制器换算完成后,转动角度的数据传递到所述定位器,从而调整所述激光投线器的转动角度,以对沟槽底部两侧坡脚位置投射坡脚指示线。
17、在该技术方案中,定位器、激光头投线器、测距传感器中心位置上设有刻线,便于将三者中心位置对齐,从而提高测量的精准度。测距传感器设在定位器底部,以可拆卸的螺纹连接、卡接等方式固定。定位器内部设有磁阻反应式步进电机、传动齿轮等结构,从而带动激光投线器的角盘转动,进行角度调整,激光投线器上激光头数量为多组,每一组可独立进行转动并可投射激光,激光的颜色可进行更换。
18、在上述技术方案中,所述测距传感器可实时测量与沟槽底部的距离,并将沟槽深度的数据以电信号的方式通过所述控制供电线传递到所述控制器,待所述测距传感器测量的沟槽深度数值符合施工预设值后,所述激光投线器对沟槽底部中心位置投射中线指示线。
19、在该技术方案中,测距传感器可为激光测距、红外线测距、超声波测距传感器等仪器,测距传感器数量可至少设置两组固定在定位器底部两侧位置上,以提高测量数据的精准度。
20、在上述技术方案中,所述水平梁体包括位于所述测量投射装置两侧的结构可进行伸缩,所述控制器与所述定位器上还设有距离传感器,可对伸缩的距离进行测算,以对两侧的所述水平梁体作同步伸缩。
21、在该技术方案中,水平梁体位于定位器底部的固定杆及两侧的伸缩杆,固定杆两侧端头处设有固定件,可对伸缩杆进行固定,距离传感器还设有屏幕,可对伸缩后变化的距离通过屏幕以数字展现给施工人员,以便对另一侧伸缩杆进行伸缩调整。
22、在上述技术方案中,所述水平梁体两侧底部设有轮组,以使所述水平梁体可在沟槽两侧地基上进行移动。
23、在该技术方案中,轮组为滑轮组或车轮结构,通过三角形支架与水平梁体连接固定,三角形支架与水平梁体通过焊接、可拆卸连接固定。轮组还设有锁定装置,锁定装置可对轮组的移动进行锁止,将水平梁体整体固定在沟槽两侧的地基上,以提高整体结构的稳定性。
24、在上述技术方案中,所述水平梁体与所述轮组间还设有调平螺杆。
25、在该技术方案中,水平梁体底部设有圆杆,圆杆通过焊接、可拆卸的螺纹连接、卡接等方式固定,圆杆内部形成有螺纹通道,以供调平螺杆螺纹连接,调平螺杆底部设有支撑架与轮组可拆卸连接。
26、在上述任一技术方案中,所述水平梁体两侧还设有水准泡,以对两侧梁体在水平位置上进行校准。
27、在该技术方案中,水准泡设置在水平梁体顶部,可为塑料或金属水准泡,通过胶片粘接或螺纹连接固定。
28、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!