自适应巡航功能的测试方法、装置及存储介质与流程
本技术涉及智能驾驶领域,特别涉及一种自适应巡航功能的测试方法、装置及存储介质。
背景技术:
1、自适应巡航功能是一种车辆驾驶辅助功能。在车辆部署自适应巡航功能时,该车辆可以通过传感器来感知前方道路上的车辆,并根据前车相对本车进行车道切入切出的不同状态,自动调整本车的行驶速度,以适应前方交通状况。比如,当前车相对本车进行车道切入时,会控制本车减速或制动,以与前车保持安全距离;当前车相对本车进行车道切出时,会控制本车加速,以维持设定的速度或与前车保持安全距离的速度。
2、将自适应巡航功能应用于真实车辆之前,通常需要对自适应巡航功能进行测试,以保证实际驾驶过程的安全性。在相关技术中,通常会采用仿真测试的方法对自适应巡航功能进行测试。即,使用仿真软件构建虚拟环境和测试车辆的虚拟模型,并设置测试车辆的初始状态,之后构建前车的虚拟模型,并根据前车切入切出时可能出现的场景,设置前车的行为,包括前车的位置、速度、加速度、切入切出的轨迹等。在搭建好的虚拟环境中执行前车切入切出的场景,获得本车的自适应巡航功能在不同场景下的测试结果,并对测试结果进行分析和评估,以此来优化自适应巡航功能。
3、然而,通过上述仿真测试方法对自适应巡航功能进行优化之后,将优化后的自适应巡航功能部署于真实车辆中,可能会出现较大偏差,进而会造成一定的安全事故。
技术实现思路
1、本技术提供了一种自适应巡航功能的测试方法、装置及存储介质,可以提高自适应巡航功能的准确性。所述技术方案如下:
2、一方面,提供了一种自适应巡航功能的测试方法,所述方法包括:
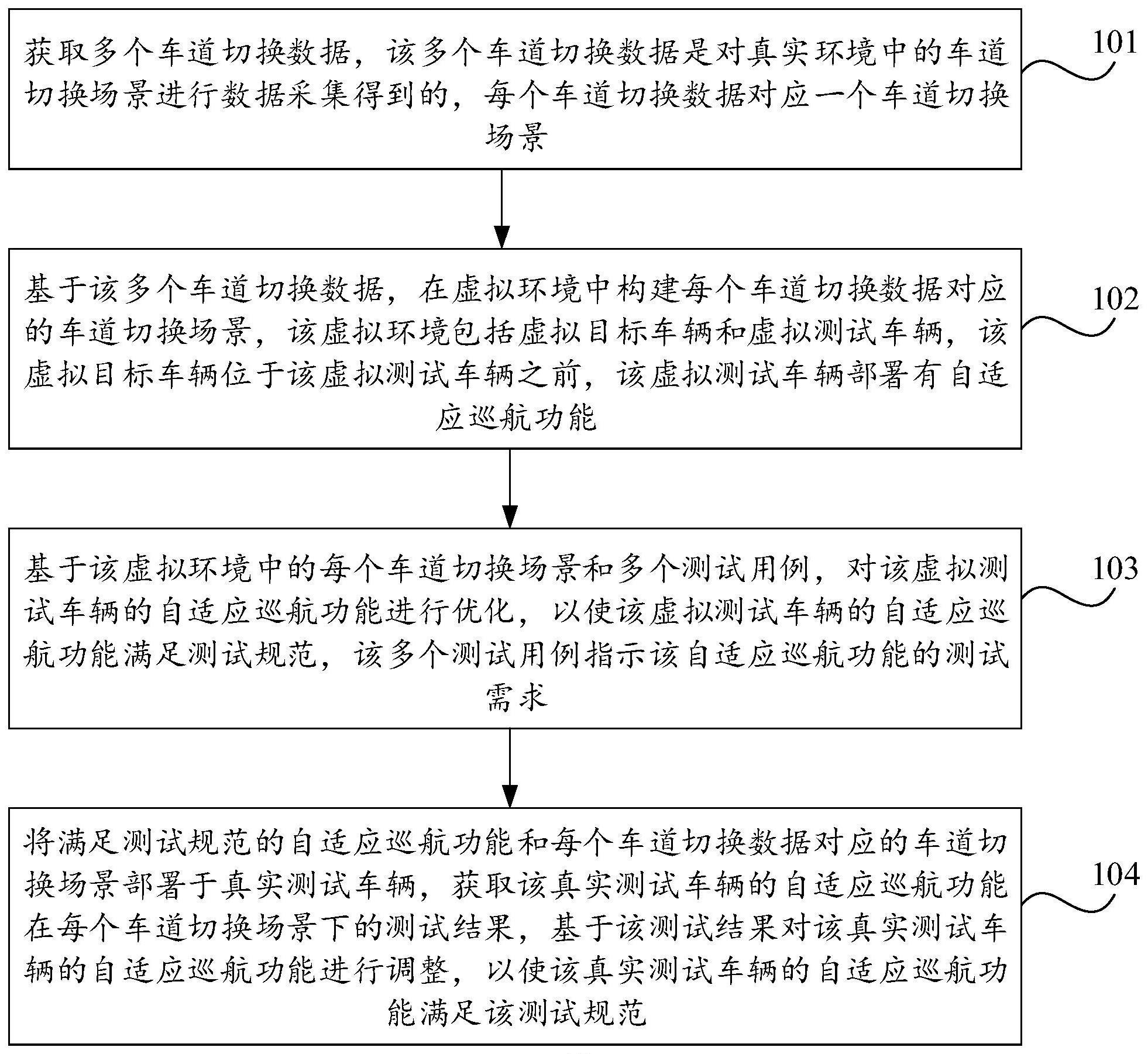
3、获取多个车道切换数据,所述多个车道切换数据是对真实环境中的车道切换场景进行数据采集得到的,每个车道切换数据对应一个车道切换场景;
4、基于所述多个车道切换数据,在虚拟环境中构建每个车道切换数据对应的车道切换场景,所述虚拟环境包括虚拟目标车辆和虚拟测试车辆,所述虚拟目标车辆位于所述虚拟测试车辆之前,所述虚拟测试车辆部署有自适应巡航功能;
5、基于所述虚拟环境中的每个车道切换场景和多个测试用例,对所述虚拟测试车辆的自适应巡航功能进行优化,以使所述虚拟测试车辆的自适应巡航功能满足测试规范,所述多个测试用例指示所述自适应巡航功能的测试需求;
6、将满足测试规范的自适应巡航功能和每个车道切换数据对应的车道切换场景部署于真实测试车辆,获取所述真实测试车辆的自适应巡航功能在每个车道切换场景下的测试结果,基于所述测试结果对所述真实测试车辆的自适应巡航功能进行调整,以使所述真实测试车辆的自适应巡航功能满足所述测试规范。
7、可选地,所述基于所述虚拟环境中的每个车道切换场景和多个测试用例,对所述虚拟测试车辆的自适应巡航功能进行优化,以使所述虚拟测试车辆的自适应巡航功能满足测试规范,包括:
8、对于所述多个测试用例中的每个测试用例,控制所述虚拟测试车辆按照所述测试用例指示的巡航测试速度在所述虚拟环境中行驶;
9、在所述虚拟测试车辆按照所述巡航测试速度行驶的过程中,基于所述虚拟环境中的每个车道切换场景,对所述虚拟测试车辆的自适应巡航功能进行优化,以使所述虚拟测试车辆的自适应巡航功能在所述测试用例下满足所述测试规范。
10、可选地,所述基于所述虚拟环境中的每个车道切换场景,对所述虚拟测试车辆的自适应巡航功能进行优化,以使所述虚拟测试车辆的自适应巡航功能在所述测试用例下满足所述测试规范,包括:
11、在所述虚拟目标车辆执行所述虚拟环境中的每个车道切换场景的过程中,通过所述虚拟测试车辆对所述虚拟目标车辆的行驶数据进行测量;
12、基于所述虚拟目标车辆的行驶数据,对所述虚拟测试车辆的自适应巡航功能进行仿真,得到每个车道切换场景下所述测试用例对应的仿真结果;
13、基于每个车道切换场景下所述测试用例对应的仿真结果,对所述虚拟测试车辆的自适应巡航功能进行优化;
14、如果优化后所述虚拟测试车辆的自适应巡航功能不满足所述测试规范,则对所述虚拟测试车辆的自适应巡航功能重新进行仿真,直至所述虚拟测试车辆的自适应巡航功能在所述测试用例下满足所述测试规范。
15、可选地,所述将满足测试规范的自适应巡航功能和每个车道切换数据对应的车道切换场景部署于真实测试车辆,包括:
16、在所述电子设备与所述真实测试车辆通过can总线连接的情况下,将满足测试规范的自适应巡航功能对应的功能数据和所述多个车道切换数据,通过所述can总线发送给所述真实测试车辆,以使所述真实测试车辆部署满足测试规范的自适应巡航功能和每个车道切换数据对应的车道切换场景。
17、可选地,所述获取所述真实测试车辆的自适应巡航功能在每个车道切换场景下的测试结果之前,所述方法还包括:
18、在所述电子设备与所述真实测试车辆通过can总线连接的情况下,通过所述can总线对所述真实测试车辆的速度控制接口和制动接口进行联调测试,以使所述真实测试测量能够准确执行所述自适应巡航功能的速度控制请求和制动请求。
19、可选地,所述基于所述测试结果对所述真实测试车辆的自适应巡航功能进行调整,以使所述真实测试车辆的自适应巡航功能满足所述测试规范之后,所述方法还包括:
20、获取真实测试结果,所述真实测试结果是所述真实测试车辆的自适应巡航功能满足所述测试规范的情况下,在真实目标车辆相对所述真实测试车辆进行车道切换过程中对所述真实测试车辆的自适应巡航功能进行测试得到的;
21、获取虚拟测试结果,所述虚拟测试结果是所述虚拟测试车辆的自适应巡航功能满足所述测试规范的情况下,在所述虚拟目标车辆相对所述虚拟测试车辆进行车道切换过程中对所述虚拟测试车辆的自适应巡航功能进行测试得到的;
22、对所述真实测试结果和所述虚拟测试结果行对比分析,得到所述自适应巡航功能的测试报告。
23、可选地,所述多个车道切换数据包括多个车道切入数据和/或多个车道切出数据。
24、另一方面,提供了一种自适应巡航功能的测试装置,所述装置包括:
25、数据获取模块,用于获取多个车道切换数据,所述多个车道切换数据是对真实环境中的车道切换场景进行数据采集得到的,每个车道切换数据对应一个车道切换场景;
26、场景构建模块,用于基于所述多个车道切换数据,在虚拟环境中构建每个车道切换数据对应的车道切换场景,所述虚拟环境包括虚拟目标车辆和虚拟测试车辆,所述虚拟目标车辆位于所述虚拟测试车辆之前,所述虚拟测试车辆部署有自适应巡航功能;
27、功能优化模块,用于基于所述虚拟环境中的每个车道切换场景和多个测试用例,对所述虚拟测试车辆的自适应巡航功能进行优化,以使所述虚拟测试车辆的自适应巡航功能满足测试规范,所述多个测试用例指示所述自适应巡航功能的测试需求;
28、第一实车测试模块,用于将满足测试规范的自适应巡航功能和每个车道切换数据对应的车道切换场景部署于真实测试车辆,获取所述真实测试车辆的自适应巡航功能在每个车道切换场景下的测试结果,基于所述测试结果对所述真实测试车辆的自适应巡航功能进行调整,以使所述真实测试车辆的自适应巡航功能满足所述测试规范。
29、可选地,所述功能优化模块包括:
30、虚拟车辆控制子模块,用于对于所述多个测试用例中的每个测试用例,控制所述虚拟测试车辆按照所述测试用例指示的巡航测试速度在所述虚拟环境中行驶;
31、功能优化子模块,用于在所述虚拟测试车辆按照所述巡航测试速度行驶的过程中,基于所述虚拟环境中的每个车道切换场景,对所述虚拟测试车辆的自适应巡航功能进行优化,以使所述虚拟测试车辆的自适应巡航功能在所述测试用例下满足所述测试规范。
32、可选地,所述功能优化子模块具体用于:
33、在所述虚拟目标车辆执行所述虚拟环境中的每个车道切换场景的过程中,通过所述虚拟测试车辆对所述虚拟目标车辆的行驶数据进行测量;
34、基于所述虚拟目标车辆的行驶数据,对所述虚拟测试车辆的自适应巡航功能进行仿真,得到每个车道切换场景下所述测试用例对应的仿真结果;
35、基于每个车道切换场景下所述测试用例对应的仿真结果,对所述虚拟测试车辆的自适应巡航功能进行优化;
36、如果优化后所述虚拟测试车辆的自适应巡航功能不满足所述测试规范,则对所述虚拟测试车辆的自适应巡航功能重新进行仿真,直至所述虚拟测试车辆的自适应巡航功能在所述测试用例下满足所述测试规范。
37、可选地,所述第一实车测试模块具体用于:
38、在所述电子设备与所述真实测试车辆通过can总线连接的情况下,将满足测试规范的自适应巡航功能对应的功能数据和所述多个车道切换数据,通过所述can总线发送给所述真实测试车辆,以使所述真实测试车辆部署满足测试规范的自适应巡航功能和每个车道切换数据对应的车道切换场景。
39、可选地,所述装置还包括:
40、第二实车测试模块,用于在所述电子设备与所述真实测试车辆通过can总线连接的情况下,通过所述can总线对所述真实测试车辆的速度控制接口和制动接口进行联调测试,以使所述真实测试测量能够准确执行所述自适应巡航功能的速度控制请求和制动请求。
41、可选地,所述装置还包括:
42、真实结果获取模块,用于获取真实测试结果,所述真实测试结果是所述真实测试车辆的自适应巡航功能满足所述测试规范的情况下,在真实目标车辆相对所述真实测试车辆进行车道切换过程中对所述真实测试车辆的自适应巡航功能进行测试得到的;
43、虚拟结果获取模块,用于获取虚拟测试结果,所述虚拟测试结果是所述虚拟测试车辆的自适应巡航功能满足所述测试规范的情况下,在所述虚拟目标车辆相对所述虚拟测试车辆进行车道切换过程中对所述虚拟测试车辆的自适应巡航功能进行测试得到的;
44、对比分析模块,用于对所述真实测试结果和所述虚拟测试结果行对比分析,得到所述自适应巡航功能的测试报告。
45、可选地,所述多个车道切换数据包括多个车道切入数据和/或多个车道切出数据。
46、另一方面,提供了一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器用于存放计算机程序,所述处理器用于执行所述存储器上所存放的计算机程序,以实现上述所述的自适应巡航功能的测试方法的步骤。
47、另一方面,提供了一种计算机可读存储介质,所述存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述所述自适应巡航功能的测试方法的步骤。
48、另一方面,提供了一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使得计算机执行上述所述的自适应巡航功能的测试方法的步骤。
49、本技术提供的技术方案至少可以带来以下有益效果:
50、本技术实施例提出了一种新的自适应巡航功能的测试方法,通过采集真实世界的前车切入切出场景,并生成多个车道切换数据,使用仿真软件构建基于真实前车场景数据的虚拟场景,在虚拟场景中对测试车的自适应巡航功能进行初期测试,在自适应巡航功能稳定后再进行真实车辆的测试。此方法可以随时对自适应巡航功能进行修改,而且没有脱离真实车辆的运行状态,有效提高测试效率,并提升测试过程的安全性。
- 还没有人留言评论。精彩留言会获得点赞!