一种V2X中基于节点选取的协同定位方法
本发明设计属于区域卫星导航协同定位领域,具体涉及到一种v2x中基于节点选取的协同定位方法。
背景技术:
1、全球卫星导航系统(global navigation satellites systems,gnss)是广泛使用提供定位信息的系统。在降级环境中,仅依靠gnss可能无法满足车辆的定位要求。随着车联网(vehicle-to-everything,v2x)技术的发展,车与车(vehicle-to-vehicle,v2v)、车与人(vehicle-to-pedestrian,v2p)、车与基础设施(vehicle-to-infrastructure,v2i)等方面之间可以实现实时信息的共享,这些信息共享的对象可以统称为节点。这些多种类型的节点之间可以通过共享位置、速度等节点状态信息和各种传感器的原始观测信息,实现协同定位。通过利用v2x,实现节点之间的定位相关信息共享,可以显著提升单个节点的定位性能上界,从而提高定位的精度和可靠性。
2、融合dgnss和节点间测距的协同定位算法已经得到了充分的研究。然而,由于v2x支持的海量连接,使得众多类型和众多数量的节点之间都可以共享信息实现协同定位,但不同节点对协同定位提供的增益是不同的。一方面,观测值质量较差或定位精度较低的节点被纳入到目标节点协同定位系统中,可能会导致协同定位性能的降低,因为定位精度差的节点带来的性能降低可能会比通过观测量带来的性能增益更大。另一方面,随着协同定位系统规模逐渐扩大,节点的定位性能上界将趋于收敛,引入一个新的协同节点带来的性能增益将会下降同时在v2x中能获得显著增益的协同节点变得缺乏,而使用v2x中的所有节点组建协同定位系统也并不合理。另外,在定位算法中忽略协同节点的位置误差也会导致定位性能的降低。因此,v2x中组建一个定位性能较优、规模合适的协同定位系统,设计合理的协同定位算法具有重要意义。
3、节点选取技术通过选取对目标节点定位性能增益最优的有限个节点,对限制系统规模下提高定位性能具有重要作用。然而目前缺乏对基于dgnss和节点间测距的协同定位系统中节点选取技术的研究,因此针对该协同定位系统进行分析,提出有效的节点选取方法,并提出充分融合协同节点定位信息的定位算法具有重要意义。
技术实现思路
1、本发明的目的在于提供一种v2x中基于节点选取的协同定位方法。降级环境下,由于信号遮挡、多径和非视距等干扰,目标节点自身的定位精度受限。得益于v2x的发展,基于dgnss和节点间测距的协同定位技术为目标节点定位提供了高精度定位解,然而受限于协同系统的规模和有限的通信资源等,选取部分协同节点组合最优定位系统具有重要研究意义。但当前大部分节点选取技术更多的是只对节点的卫星观测条件、节点间测距和节点位置不确定度中的一种或两种进行了考量,这种节点选取技术必然会导致协同定位系统的次优解。另外,现有协同定位方法大多忽视了协同节点的位置误差,将具有较大位置误差的协同节点纳入协同定位系统将显著导致定位估计性能的降低,所以将协同节点的先验定位信息考虑到定位算法中以约束目标的定位解将对提高目标节点定位性能具有重要意义。因此,如何设计有效的节点选取算法,综合考量节点的卫星观测条件、节点间测距和节点定位不确定度,从而构建最优协同定位系统具有重要意义,同时,如何设计考虑节点定位不确定度的协同定位算法对提升定位性能也有关键作用。
2、为了实现上述目的,本发明提供了一种v2x中基于节点选取的协同定位方法,本发明由协同节点定位解算和定位评估、协同节点定位相关信息播发、协同节点选取及协同定位系统组建和目标节点定位估计组成。本发明提出将协同节点的卫星观测、测距条件和定位不确定度纳入到节点选取的综合考量中,并通过等效费歇尔信息矩阵(equivalentfisher information matrix,efim)评估不同协同节点提供的定位性能增益的大小,实现协同节点的优选。提出将协同节点的不确定度融合到基于dgnss和节点间测距的定位算法中,以对协同节点的位置进行约束从而提高定位性能。
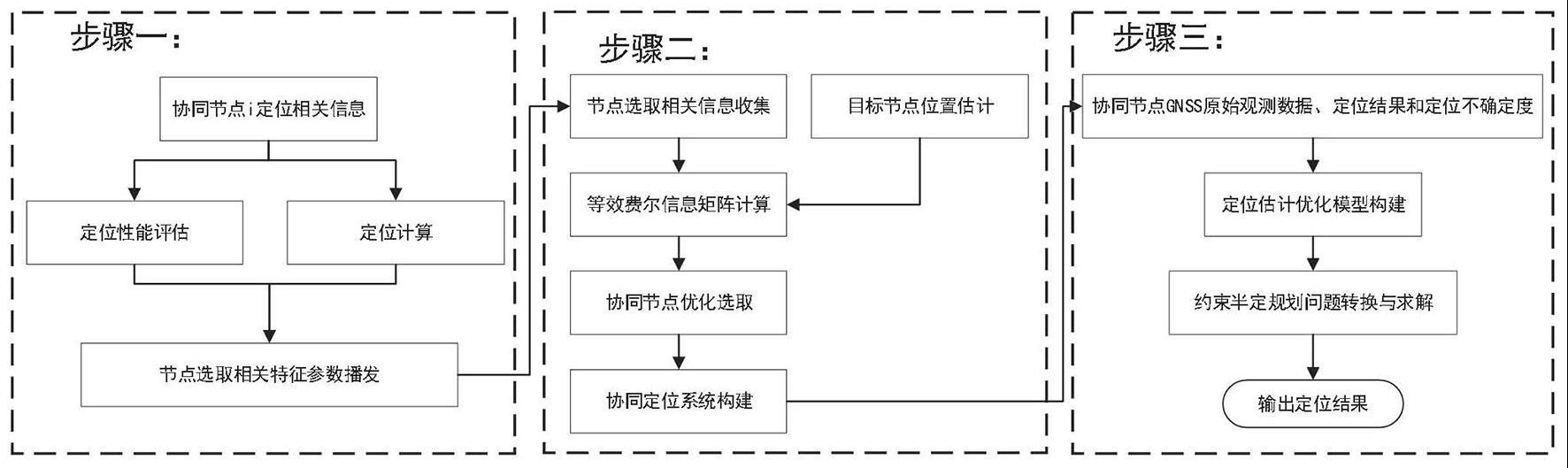
3、本发明提出的具有节点选取的协同定位方法,其具体实施步骤如下:
4、步骤一:协同节点根据定位信息计算自身的定位结果,评估定位精度计算定位不确定度,并播发当前历元的定位状态向量、定位不确定度和观测卫星集合。
5、步骤二:收集步骤一协同节点位置相关信息,包括协同节点位置、定位不确定度和观测卫星集合,并由目标节点收集到测距信息判断测距连通性;通过efim计算协同节点提供的定位性能增益,确定协同节点的优劣,并通过贪婪式节点选取策略选取部分更优的协同节点,从而构建最优协同定位系统。
6、步骤三:根据构建的协同定位系统,收集对应的定位相关信息,融合由车间测距模块获得的车间测距值,并将协同节点的定位不确定性作为先验信息,通过设计的半定规划定位算法解算出最优估计位置。
7、其中,在步骤一中所述的“协同节点根据定位信息计算自身的定位结果,评估的定位精度计算定位不确定度,并播发当前历元的定位状态向量、定位不确定度和观测卫星数”,其做法如下:
8、s11、通过协同节点i得高精度接收机获取协同节点精确位置以及当前历元的观测卫星集合{ns}i;
9、s12、结合协同节点i的原始观测量信息通过电离层延时误差模型和对流层延时误差模型计算电离层延时t及对流层延时i,计算修正后接收机原始观测量的fim,获取当前历元协同节点的定位不确定度δxi;
10、s13、存储当前历元的原始观测量,并播发当前历元的定位解卫星观测集合{ns}i和定位不确定度δxi。
11、其中,在步骤二中所述的“收集步骤一协同节点位置相关信息,包括协同节点位置、定位不确定度和卫星观测集合,并由目标节点收集到的测距信息判断测距连通性,由此可以计算协同节点提供的定位性能增益,确定协同节点的优先级,并通过贪婪式节点选取策略选取部分协同节点,从而构建最优协同定位系统”,其做法如下:
12、s21、获取当前历元所有协同节点的位置相关信息,包括协同节点位置、定位不确定度和观测卫星数量;
13、s22、通过目标节点的定位信息计算粗略位置,并使用目标节点收集到的测距信息判断协同节点的测距连通性;
14、s23、计算协同节点与目标节点间定位fim,计算对目标定位性能增益的efim,选取一个具有最优efim行列式的协同节点;
15、s24、判断协同系统规模是否达到设定目标m,如果达到要求停止选取,协同定位系统组建完成,否则,保留当前已选取的协同节点,在现有协同节点基础上回到s23步;
16、其中,在步骤三中所述的“根据构建的协同定位系统,收集对应的定位相关信息,融合由车间测距模块获得的车间测距值,并将协同节点的定位不确定性作为先验信息,通过设计的半定规划定位算法解算出最优估计位置。”,其做法如下:
17、s31、根据s23步、s24步组建的协同定位系统,收集相应协同节点的原始观测量,并由节点间测距模块获取对应的测距值;
18、s32、建立协同节点定位不确定度约束下的位置估计方差,包含gnss的伪距双差测量值、节点间的测距测量值以及协同节点先验信息;
19、s33、将上述优化问题转换为具有约束下的凸优化问题,将约束条件松弛为包含目标节点位置凸集,标准sdp优化问题构建完成。本发明通过cvx工具箱求解sdp优化问题,求解器采用sdpt3。
20、通过上述步骤,利用协同节点的定位相关信息评估对目标节点提供的定位性能增益,选取最优的部分协同节点构建协同系统,同时将协同节点的不确定度作为先验信息约束定位优化方程,从而提高目标节点的定位性能。
21、依据本发明的设计,本发明实现了一种v2x中基于节点选取的协同定位方法,算法综合考虑协同节点选取的多种因素,能够构建更优的协同定位系统,相比于传统的节点选取方法能实现更高的定位性能。
22、依据本发明的设计,本发明实现了一种v2x中基于节点选取的协同定位方法,实现协同节点先验信息的利用,将协同节点的先验信息加入到优化方程,从而提升目标定位性能。
23、依据本发明的设计,本发明解决了目标节点的协同定位问题,无需所有目标节点通信范围内的节点参与协同定位,避免了大量原始数据传输的问题,同时解决了选取节点中考虑因素不充分的问题,提升了目标节点的定位性能。
- 还没有人留言评论。精彩留言会获得点赞!