基于超声相控阵的轴承故障检测方法、装置及存储介质
本发明涉及风电机组异步发电机检测,尤其是涉及一种基于超声相控阵的轴承故障定位检测方法。
背景技术:
1、风电机组传动链长期受交变载荷作用,属故障高发部分,尤其是其中的齿轮箱和轴承部分。而在齿轮箱中,轴承故障也占大部分,轴承异常引发的故障占传动链所有故障的三成以上。在轴承故障检测方式中,大多数以检测齿轮箱处的噪声信号作为检测方式。在检测轴承处噪声的分析中,研究者们利用时域、频域或时频域等分析方法,对信号中包含的故障信息进行有效提取,主要有傅里叶频谱分析、小波分析、盲信号处理、经验模态分解等方法,声源定位技术主要有基于可控波束形成的声源定位方法、基于高分辨率空间谱估计的声源定位方法以及基于到达时间差估计的声源定位方法。同时在轴承故障产生过程中,也会伴随着一些其他的物理现象,如温度升高、不规律振动、以及噪声。在故障检测也有所应用,但相控阵定位轴承故障研究较少。
2、中国专利申请cn202211297008.x,通过获取与风电机组发电机相关的变量输入训练好的发电机状态监测模型获得变量重构值;基于变量的重构值和实测值确定重构误差;基于重构误差对风电机组发电机进行故障定位。中国专利申请cn202310015478.0,通过若干个传声器获取列车行驶过程中轴承的观测声学信号;基于贝叶斯盲源分离模型,根据所述观测声学信号确定若干个故障源的声源信号;对每一个故障源的声源信号进行频谱分析,确定轴承的损伤位置;
3、目前而言,现有的轴承故障检测技术一般都是基于轴承的物理特性和轴承的振动和噪声方面作为研究。通常基于检测装置提取声音信号,在提取完信号特征后进行时域频域方面的分析,通过所构建训练的机器学习模型来检测轴承是否出现故障,计算的复杂性较高。并且在实际工作情况中,维修人员需要知道轴承具体故障出现在传动链的具体位置,例如故障点位于轴承外圈、内圈、滚动体或者保持架上,传统的轴承故障检测方法不能精确的给出故障点的方位角和距离。
技术实现思路
1、本发明的目的就是为了提供一种基于超声相控阵的轴承故障定位检测方法。
2、本发明的目的可以通过以下技术方案来实现:
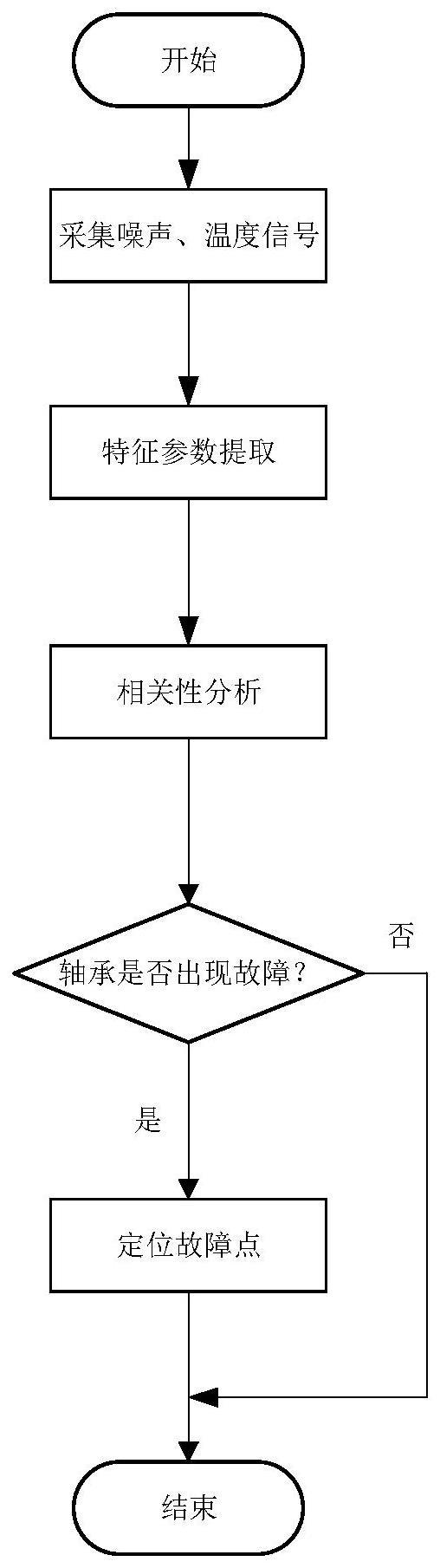
3、作为本发明的第一方面,提供一种基于超声相控阵的轴承故障检测方法,所述方法步骤包括:
4、采集轴承处的温度信号和声音信号;
5、利用相似矩阵的盲源分离方法分离噪声和纯净声音信号;
6、对轴承处温度信号和声音信号进行相关性分析,判断轴承是否出现故障;
7、当故障出现时采用超声相控阵技术定位故障点位置。
8、进一步的,所述利用相似矩阵的盲源分离方法分离噪声和纯净声音信号,具体步骤如下:
9、对采集到的声音信号进行预处理;
10、将预处理后的声音信号从时域信号转变为频域信号;
11、对时频转换结果的绝对值进行平方,计算得到能量谱;
12、对能量谱取梅尔频谱倒谱系数;
13、基于相似矩阵盲源分离得到轴承纯净声信号;
14、将已分离的轴承音频信号还原成时域信号。
15、进一步的,所述对采集到的声音信号进行预处理,为滤除轴承声音信号中的低频干扰部分,增加高频部分的比例,对采集到的声音信号进行分窗处理,并对声音信号进行加窗处理。
16、进一步的,所述对能量谱取梅尔频谱倒谱系数,具体步骤包括:
17、对能量谱进行三角滤波;
18、
19、式中,hi(k)表示滤波器参数;fi表示三角滤波器的中心频率;
20、三角滤波后对能量谱取对数,得到对数能量;
21、对对数能量进行逆变换,得到梅尔频率倒谱系数。
22、进一步的,所述利用相似矩阵分离轴承纯净声信号,具体包括以下步骤:
23、将声音信号的对数功率谱按列取距离范数,并进行中心化处理;
24、求解中心化后的信号的协方差矩阵cx;
25、求解cx的特征值对角矩阵d,并求解特征值对应的特征向量组成的特征向量e,通过所求的矩阵d和e,得到白化矩阵b:
26、
27、通过对信号x进行白化:
28、
29、对音频分量的特征作反傅里叶变换,重新得到轴承声音信号的准确时域波形。
30、进一步的,所述对轴承处温度信号和声音信号进行相关性分析,判断轴承是否出现故障,具体包括以下步骤:
31、计算轴承声音信号x′(t)与轴承温度信号t的互相关函数:
32、
33、计算轴承声音信号x′(t)与轴承温度信号t的中心化互相关系数ρ(τ):
34、
35、式中,i(t)表示发电机定子侧电流信号;
36、当ρ(τ)接近1时,轴承声音信号与温度有相关性,则判断此时轴承出现故障。
37、进一步的,所述采用超声相控阵技术定位故障点位置,包括以下步骤:
38、利用近场线阵模型求解空间角度和距离;
39、采用嵌套阵模型,通过构造差和矩阵实现孔径扩展;
40、利用gabor小波变换提取信号中某一频率作为传感器阵列的接收信号的实际频率;
41、通过凸优化求解得到相应的坐标数据,获得故障点位置空间图像。
42、进一步的,所述采用超声相控阵技术定位故障点位置,具体过程如下:
43、当k个近场球面波入射到超声传感器阵列,其中第i个阵元的接收信号表示为:
44、
45、式中,xi(t)为第i个阵元接收的信号,rki和θki为第k个信号源与第i个阵元的距离大小和方位角,sk(t)为第k个源信号,ni(t)为第i个阵元接收的噪声总和,αi(rki,θki)为第k个信号源相对于第i个阵元的方向函数;
46、空间阵列中所有传感器阵元的接收信号表示为:
47、x(t)=a(r,θ)s(t)+n(t)
48、式中,x(t)为m个阵元的接收信号,s(t)为k个近场入射信号,a(r,θ)表示声发射源相对于信号接收阵列的流型矩阵;n(t)表示阵元接收的噪声信号;
49、进行波达方向估计,整个阵列的接收信号为:
50、x(fi)=a(f,θ)s(fj)+n(fj)
51、式中,f表示原信号频率值,fi表示第i个阵元接受信号时的频率,fj表示子带内任意频率;
52、采取宽带声源位置估计算法选择最优聚焦矩阵;
53、t(fi)=v(fi)uh(fi)
54、式中,v(fi)和uh(fi)分别是以矩阵a(fi,θ)ah(f0,θ)的左奇异和右奇异向量为列向量构成的矩阵;ah(f0,θ)表示声发射源相对于信号接收阵列的流型矩阵,f0为聚焦频率;
55、使用嵌套阵模型,通过构造差和矩阵实现孔径扩展,利用阵列的非均匀性减少空间采样的冗余性;
56、对宽带信号进行分析,将阵列的接收信号x(t)划分为m段;将每一段分别进行快速傅里叶变换得到频域信号;估计后的频域数据为:
57、xt=a(f0)s+nt
58、式中,xt表示频域数据,a为阵列流型矩阵,f0为参考频率,s为信号矢量,nt为噪声矢量;
59、采用gabor小波变换来提取信号中某一频率作为传感器阵列的接收信号的实际频率:
60、
61、其中,ku,v为中心频率;σ为与小波频率带宽相关的常数;u为方向因子;v表示尺度因子,z为给定位置(x,y)的坐标;i表示采样点个数;
62、当时域上的采样点数为t时,波达方向估计的不含约束条件的数学模型为:
63、
64、式中,λ用来平衡误差向量和解向量,是由s所有行向量的l2范数构成的列向量;
65、将上式转换为二阶锥规划问题为:
66、minp+λq
67、
68、式中,xsv表示信号能量的大部分,ssv=svdk,l表示阵列长度,r表示远近场划分边界,其中λ表示信号波长;
69、通过凸优化求解得到ssv,根据ssv的峰值位置确定轴承声音信号的方向和距离;
70、使用轴承声音信号的方向和距离的坐标数据来建立x轴和y轴,以ssv值建立z轴,得到故障点位置空间图像。
71、作为本发明的第二方面,提供一种基于超声相控阵的轴承故障定位检测装置,包括存储器、处理器,以及存储于所述存储器中的程序,所述处理器执行所述程序时实现如上所述的基于超声相控阵的轴承故障检测方法。
72、作为本发明的第三方面,提供一种存储介质,其上存储有程序,所述程序被执行时实现如上所述的基于超声相控阵的轴承故障检测方法。
73、与现有技术相比,本发明具有以下有益效果:
74、1)本发明所提供的轴承故障定位检测的方法,实时采集轴承的温度和噪声信号,采用盲源分离的方法分离噪声信号,使得误判断率下降,再利用相关性分析判断轴承是否出现故障,减少计算的复杂性。
75、2)本发明的检测方法,在出现故障时采用超声相控阵技术定位故障点位置,精确的给出故障点的方位角和距离。降低了传统检测的局限性,不再是只针对故障进行检测,在诊断出零部件故障的基础上,能够调查系统故障发生的根本原因,找出原发性故障,只有这样才能真正消除机械设备中的故障。发电机的故障类型与轴承故障的产生密切相关,因此,轴承故障定位检测技术具有重要的理论价值与工程应用前景。
- 还没有人留言评论。精彩留言会获得点赞!