复杂浮筏结构变形与刚体位移监测方法
本发明涉及船舶浮筏结构变形与刚体位移监测领域,复杂浮筏结构变形与刚体位移监测方法。
背景技术:
1、浮筏结构是目前船舶隔离振动的主要结构形式之一,当处于弹性支撑(如气囊隔振器)状态时,位移包含结构变形和刚体位移。随着浮筏向着大型化和轻量化的发展,浮筏的刚度不可避免的降低,结构变形愈发明显。结构变形不仅降低浮筏的隔振性能,而且还会恶化浮筏上方的轴系设备的对中状态,极端情况下危及设备的运行安全。针对大型浮筏结构的状态监测,现有的《船舶推进及动力设备大型隔振系统对中监测装置》(专利号201610033577.1),利用多测点位移变化信息,解算出推进主机对中状态及浮筏姿态,不能量化浮筏的结构变形。针对结构变形的监测,目前公知的逆有限元变形重构技术(专利号202211128284.3、202210312365.2、202110806838.x、202011615128.0)通过融合表面应变信息,解算结构变形,但目前的方法需要将结构一端固定,所解算的结构变形等同于位移,不能解算出结构的刚体位移。在浮筏的智能控制过程中,需要利用刚体位移信息来指导控制推进主机的对中状态,同时需要利用结构变形信息来指导抑制控制筏架的变形,但监测浮筏结构变形与刚体位移的方法尚未见报道,因此亟需一种复杂浮筏结构变形与刚体位移监测方法。
技术实现思路
1、为了解决上述问题,本发明提出了一种复杂浮筏结构变形与刚体位移监测方法,通过融合位移数据和应变数据,定量的计算出结构的刚体位移和结构变形。
2、复杂浮筏结构变形与刚体位移监测方法,包括以下步骤:
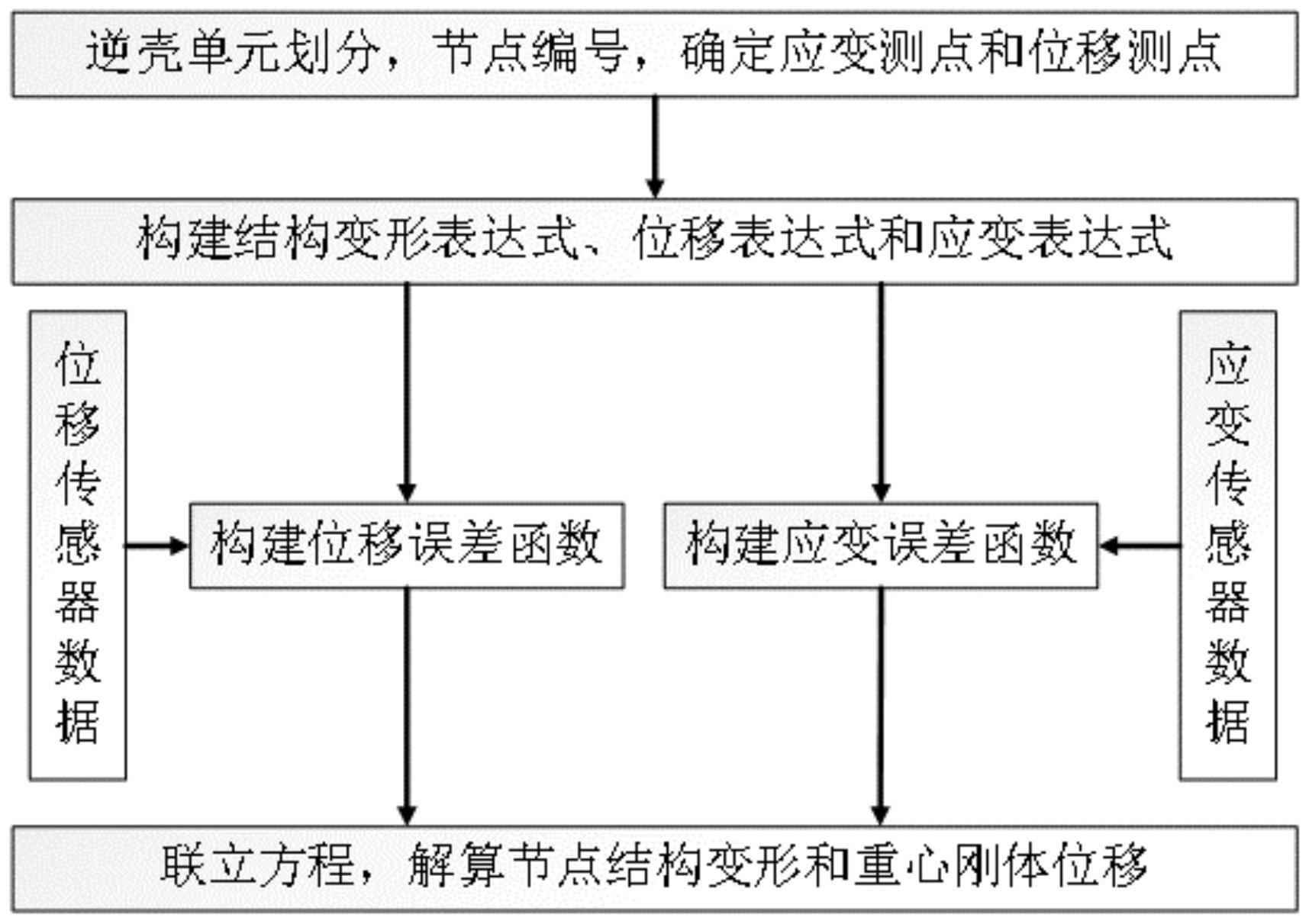
3、步骤1、在浮筏结构中面上按需要划分逆壳单元网格,确定逆壳单元数量并对节点进行编号,确定浮筏上、下表面应变测点和浮筏下表面位移测点位置;设应变测点有n组,每组应变测点包括浮筏上、下表面对应的两个应变测点,位移测点共m个,在应变测点处安装应变传感器,在位移测点处安装位移传感器;
4、步骤2、根据逆壳单元节点六自由度结构变形和浮筏重心六自由度刚体位移与测量位移和应变关系式,以及应变传感器和位移传感器的位置坐标和实时检测结果,解算出逆壳单元节点实时六自由度结构变形和浮筏重心六自由度刚体位移。
5、进一步的,所述步骤1中,在浮筏结构中面上按需要划分逆壳单元网格,从所有网格节点中至少选取三个作为位移测点,且三个位移测点不共线,将每个逆壳单元网格的中心点作为应变测点。
6、进一步的,所述步骤3中,逆壳单元节点六自由度结构变形和浮筏重心六自由度刚体位移与测量位移和应变关系式为:
7、
8、其中,ue为逆壳单元节点六自由度结构变形,ur为浮筏重心六自由度刚体位移,公式右侧最终的计算结果为一个列向量,其中ur为列向量的末尾6个值组成的列向量,剩余值组成的列向量为ue;
9、
10、
11、
12、
13、
14、
15、(s,t)为应变传感器在逆壳单元中的局部位置坐标;(xi′,y′i)为节点i的位置坐标,i=1,2,3,4分别对应一个逆壳单元四个角上节点处的位移测点;g表示由位移测点的三向坐标组成的组装齐次坐标变换矩阵,具体为:
16、
17、其中,(xt,yt)为位移测点t的位置坐标,t=1,……,m;z为位移测点的垂向坐标,取浮筏结构厚度的一半,即h;
18、表示由m个位移测点实时三向位移测量数据组装形成的位移矩阵,其中为位移测点t的实时三向位移测量数据;ke为等效刚度矩阵,为等效载荷矩阵,具体为:
19、
20、bm、bk、bs为am、ak计算获得的参数矩阵,eε=[e1ε,…,enε]t,kε=[k1ε,…,knε]t;分别为n组应变测点的实测正应变和切应变计算获得的膜应变和弯曲曲率,we、wk、wg为权重系数,we=wk=1,ejε为第j组应变测点实测膜应变,kjε为第j组应变测点弯曲曲率;
21、
22、
23、为第j组应变测点上表面的应变测点的正应变,为第j组应变测点下表面的应变测点的正应变;h表示浮筏结构厚度的一半。
24、本发明的有益效果为:与现有技术相比,本发明融合应变数据和位移数据,有效的解决了弹性支撑状态下的浮筏结构刚体位移和结构变形的监测和分离,可在船舶、航空航天等领域的不具有固定支撑结构的结构变形与刚体位移监测等领域广泛推广。
技术特征:
1.复杂浮筏结构变形与刚体位移监测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的复杂浮筏结构变形与刚体位移监测方法,其特征在于,所述步骤1中,在浮筏结构中面上按需要划分逆壳单元网格,从所有网格节点中至少选取三个作为位移测点,且三个位移测点不共线,将每个逆壳单元网格的中心点作为应变测点。
3.根据权利要求1所述的复杂浮筏结构变形与刚体位移监测方法,其特征在于,所述步骤3中,逆壳单元节点六自由度结构变形和浮筏重心六自由度刚体位移与测量位移和应变关系式为:
技术总结
本发明涉及一种复杂浮筏结构变形与刚体位移监测方法,本发明在浮筏结构中面上按需要划分逆壳单元网格,确定逆壳单元数量并对节点进行编号,确定浮筏上、下表面应变测点和浮筏下表面位移测点位置;在应变测点处安装应变传感器,在位移测点处安装位移传感器;根据逆壳单元节点六自由度结构变形和浮筏重心六自由度刚体位移与测量位移和应变关系式,解算出逆壳单元节点实时六自由度结构变形和浮筏重心六自由度刚体位移。本发明融合应变数据和位移数据,有效的解决了弹性支撑状态下的浮筏结构刚体位移和结构变形的监测和分离,可在船舶、航空航天等领域的不具有固定支撑结构的结构变形与刚体位移监测等领域广泛推广。
技术研发人员:卜文俊,成建伟,潘逊,施亮,徐伟,刘松,胡泽超,程光辉
受保护的技术使用者:中国人民解放军海军工程大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!