融合UWB和BLE技术的定位装置和定位方法与流程
本发明涉及定位,特别是涉及一种融合uwb和ble技术的定位装置和定位方法。
背景技术:
1、由于uwb(ultra wide band,超宽带)室内定位技术具有时间分辨率高、抗多径干扰强、低功耗和穿透能力强等特点,在短距离精确定位方面具有独特的优势,基于uwb室内定位技术的电子产品吸引了越来越多研发人员的热切关注。
2、目前,uwb技术对目标物的到达角度定位,常规是采用基于pdoa(phasedifference of arrival,到达相位差)算法通过计算多天线端的天线阵发射/接受信息的相位差实现的。然而不幸的是,现有多天线端的天线阵设计都是基于定向天线方案,无法实现对目标物的全向实时精确定位。
3、为解决此问题,常用的方案是采用多套uwb定位天线阵近距全向摆放。但是这样会导致以下五个缺点:1、物料成本变高;2、定位装置占用空间变大,不利于小型化;3、多套uwb定位天线阵的摆放位置及安装需要提前规划,调试难度大;4、邻近同频定位天线阵的相互干扰,增加设计复杂度;5、不同天线阵对应的平面不一样,且目标终端在不同位置时候需要切换不同的天线阵,精确角度的获得需要更复杂的算法及更大的计算量。
技术实现思路
1、本发明实施例旨在提供一种融合uwb和ble(bluetooth low energy,低功耗蓝牙)技术的定位装置和定位方法,以解决现有技术中对目标物进行全向实时精确定位时,存在成本高、设计复杂、占地空间大等问题。
2、为解决上述技术问题,本发明实施例提供以下技术方案:
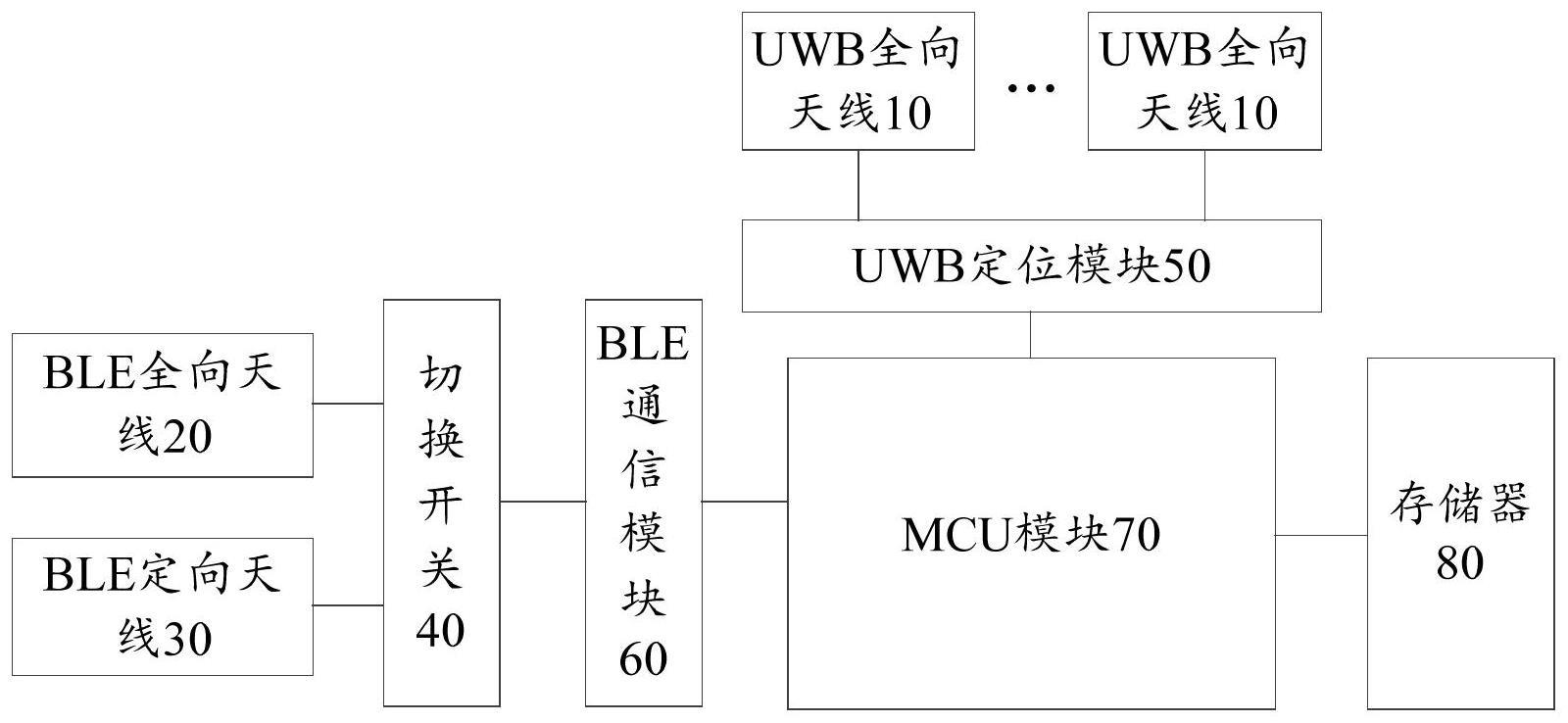
3、根据本发明的一方面,提供一种融合uwb和ble技术的定位装置,所述定位装置包括ble全向天线、ble定向天线、切换开关、ble通信模块、若干uwb全向天线、uwb定位模块和mcu(microcontroller unit,微控制单元)模块,所述ble通信模块通过所述切换开关连接至所述ble全向天线或所述ble定向天线,所述uwb全向天线连接至所述uwb定位模块,所述ble通信模块和所述uwb定位模块连接至所述mcu模块;
4、所述mcu模块,用于控制所述ble通信模块将所述切换开关连通至所述ble全向天线,通过所述ble全向天线和所述ble通信模块扫描出目标终端;在扫描出所述目标终端后,通过所述uwb全向天线和所述uwb定位模块确定出所述目标终端与所述定位装置的距离和到达角度;控制所述ble通信模块将所述切换开关连通至所述ble定向天线,通过所述ble定向天线和所述ble通信模块确定出所述目标终端相对于所述ble定向天线所在平面的朝向,并在所述朝向确定后,控制所述ble通信模块将所述切换开关重新连通至所述ble全向天线;根据所述目标终端的朝向、所述距离和所述到达角度得到所述目标终端的定位结果。
5、可选地,所述mcu模块,还用于判断在下次定位时,是否需要对所述目标终端的朝向进行重新确定,若是,则在下次定位时,控制所述ble通信模块将所述切换开关连通至所述ble定向天线,对所述目标终端的朝向进行重新确定,并在所述朝向重新确定后,控制所述ble通信模块将所述切换开关重新连通至所述ble全向天线。
6、可选地,所述mcu模块,判断在下次定位时,是否需要对所述目标终端的朝向进行重新确定包括:
7、判断所述目标终端垂直于所述ble定向天线所在平面的速度分量与所述目标终端的朝向是否同向,若是,则在下次定位时,不需要对所述目标终端的朝向进行重新确定;
8、若否,则判断所述目标终端的到达角度是否大于阈值角度,若是,则在下次定位时,需要对所述目标终端的朝向进行重新确定;若否,则在下次定位时,不需要对所述目标终端的朝向进行重新确定,所述阈值角度由所述目标终端垂直于所述ble定向天线所在平面的速度分量大小、预设的定位周期和所述距离确定。
9、可选地,所述uwb定位模块包括多个射频端口,其中一个为发射接收端口,其余为接收端口。
10、可选地,所述uwb全向天线包括一个用于发射和接收uwb射频信号的第一uwb全向天线和若干个仅用于接收uwb射频信号的第二uwb全向天线,所述第一uwb全向天线连接至所述发射接收端口,每一所述第二uwb全向天线连接至每一所述接收端口。
11、可选地,所述mcu模块,还用于扫描到目标终端时,控制所述uwb定位模块进入工作状态,未扫描到目标终端时,控制所述uwb定位模块处于休眠状态。
12、根据本发明的另一方面,提供一种融合uwb和ble技术的定位方法,应用于上述所述的定位装置,所述方法包括:
13、控制ble通信模块将切换开关连通至ble全向天线,通过所述ble全向天线和所述ble通信模块扫描出目标终端;
14、在扫描出所述目标终端后,通过uwb全向天线和uwb定位模块确定出所述目标终端与所述定位装置的距离和到达角度;
15、控制所述ble通信模块将所述切换开关连通至ble定向天线,通过所述ble定向天线和所述ble通信模块确定出所述目标终端相对于所述ble定向天线所在平面的朝向,并在所述朝向确定后,控制所述ble通信模块将所述切换开关重新连通至所述ble全向天线;
16、根据所述目标终端的朝向、所述距离和所述到达角度得到所述目标终端的定位结果。
17、可选地,所述方法还包括:
18、判断在下次定位时,是否需要对所述目标终端的朝向进行重新确定;
19、若是,则在下次定位时,控制所述ble通信模块将所述切换开关连通至所述ble定向天线,对所述目标终端的朝向进行重新确定,并在所述朝向重新确定后,控制所述ble通信模块将所述切换开关重新连通至所述ble全向天线。
20、可选地,所述判断在下次定位时,是否需要对所述目标终端的朝向进行重新确定的步骤,包括:
21、判断所述目标终端垂直于所述ble定向天线所在平面的速度分量与所述目标终端的朝向是否同向,若是,则在下次定位时,不需要对所述目标终端的朝向进行重新确定;
22、若否,则判断所述目标终端的到达角度是否大于阈值角度,若是,则在下次定位时,需要对所述目标终端的朝向进行重新确定;若否,则在下次定位时,不需要对所述目标终端的朝向进行重新确定,所述阈值角度由所述目标终端垂直于所述ble定向天线所在平面的速度分量大小、预设的定位周期和所述距离确定。
23、根据本发明的再一方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,当所述计算机程序被处理器执行时,所述处理器执行上述任一项所述方法的步骤。
24、本发明实施例的有益效果是:区别于现有技术的情况,本发明实施例中,采用融合uwb和ble技术的定位装置,该定位装置包括ble全向天线、ble定向天线、切换开关、ble通信模块、若干uwb全向天线、uwb定位模块和mcu模块;mcu模块控制切换开关连通至ble全向天线,通过ble全向天线和ble通信模块扫描出目标终端后,通过uwb全向天线和uwb定位模块确定出目标终端与定位装置的距离和到达角度;再控制ble通信模块将切换开关连通至ble定向天线,通过ble定向天线和ble通信模块确定出目标终端相对于ble定向天线所在平面的朝向,最后根据目标终端的朝向、距离和到达角度得到目标终端的定位结果。采用本发明,能实现对目标终端的全向实时精确定位,结构简单、占地空间小、能耗和成本低。
- 还没有人留言评论。精彩留言会获得点赞!