叶尖振动加速度的叶端定时异步振动参数辨识方法及系统
本发明涉及旋转机械旋转叶片非接触式测量,尤其涉及一种基于叶尖振动加速度的叶端定时异步振动参数辨识方法与系统。
背景技术:
1、传统的叶端定时技术使用安装在固定机匣上的叶端定时传感器对旋转叶片的到达时间进行测量,安装于旋转轴附近的参考传感器提供转速信息和时间基准,通过计算两个时间值之间的差异,可以得出叶片的振动位移,从而得到叶片振动的特征参数,如振幅、频率、应力等,从而可以获得发动机的运行状态。异步振动的叶片振动频率是转频的非整数倍,是非定常流将其部分能量传递到叶片的结果。常见的异步振动故障有:颤振、喘振和旋转失速等,这些故障主要和旋转机械运行中的气流扰动有关,对发动机旋转叶片安全运行产生重大隐患。异步振动参数辨识面临转速变化较大的问题,然而,参考传感器的安装位置与旋转叶片存在着一定的距离,加之发动机内部复杂的情况,参考传感器的测量易受干扰,导致测量结果出现误差。由于发动机内部环境恶劣,易导致传感器失效甚至发生脱落。因此,本发明通过基于叶尖振动位移与加速度之间的关系,通过利用所述测量到达时间和安装角度计算叶尖振动加速度,在无需计算任何参考转速和先验信息的条件下实现叶片振动参数的精确辨识,进一步扩展叶端定时测量技术在异步振动参数辨识问题中的工程应用。
2、在背景技术部分中公开的上述信息仅仅用于增强对本发明背景的理解,因此可能包含不构成本领域普通技术人员公知的现有技术的信息。
技术实现思路
1、针对现有技术中的不足,本发明的目的是提供一种基于叶尖振动加速度的叶端定时异步振动参数辨识方法和系统,在航空发动机旋转叶片发生旋转失速、喘振、声共振等异步振动时,在无转速参考传感器和变转速的情况下,不需要计算参考转速,仅利用叶端定时测量的到达时间和安装角度关系,计算叶尖振动加速度来替换传统的叶尖振动位移,省略测量过程中转速计算的不确定性,从而提高异步振动参数辨识的准确性。
2、为了实现上述目的,本发明提供如下技术方案:
3、本发明的一种基于叶尖振动加速度的叶端定时异步振动参数辨识方法包括:
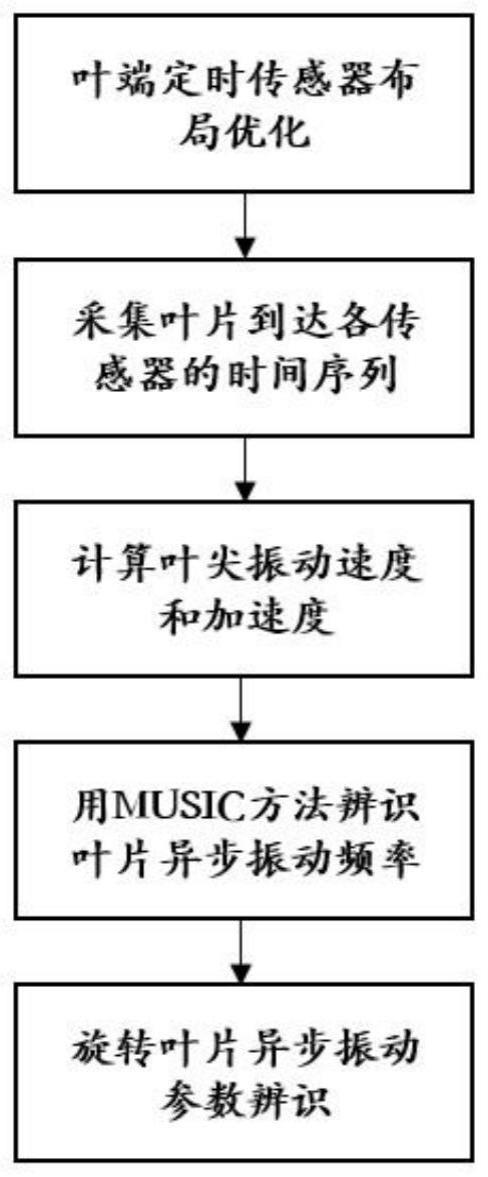
4、第一步骤s1,将三个叶端定时传感器一组的至少一组等角度周向安装在发动机机匣上;
5、第二步骤s2,在变转速工况下获取各旋转的转子叶片到达叶端定时传感器的时间序列;
6、第三步骤s3,在变转速或恒定转速的不同工况中,将每一转中测量的各转子叶片的到达时间作为因变量,各转子叶片的到达角度作为自变量进行线性拟合以再现每一转的转速信息、;
7、第四步骤s4,基于一组的相邻三个叶端定时传感器的时间序列和安装角度计算叶尖振动加速度;
8、第五步骤s5,建立基于叶尖振动加速度的异步振动参数辨识模型;
9、第六步骤s6,基于异步振动参数辨识模型,使用全叶片谱方法辨识异步振动频率和幅值。
10、第七步骤s7,基于异步振动参数辨识模型,首先利用music方法辨识出转子叶片异步振动频率,再通过辨识结果获得叶片振动幅值。
11、所述的方法中,一组的3个叶端定时传感器等角度分布周向安装且两两间隔小于10°。
12、所述的方法中,第二步骤s2中,在变转速工况下开展试验并获取各旋转的转子叶片到达叶端定时传感器的时间序列矩阵大小为nb*n×np其中,ti,j,n表示第i号叶端定时传感器测量第j号叶片在第n圈转动测量的到达时间,转子一共包含nb个叶片,周向安装np个叶端定时传感器,连续采集n圈的数据。
13、所述的方法中,第三步骤s3中,叶片到达时间与转动角度位置关系为:其中,pi,j,n表示第i号叶端定时传感器测量到第j号叶片在第n圈内转动的角度,转子叶片总共有nb个叶片,基于多模态测量安装np个叶端定时传感器,pai为第i个叶端定时传感器的安装角度,baj为实际第j个安装间隔。
14、所述的方法中,第三步骤s3中,圈内转速呈线性变变化,叶片转速为将每圈中多个叶端定时传感器测量的叶片到达时间与对应的转动角度采用二次函数最小二乘拟合得:其中,为拟合二次函数的系数;求解后获得各圈的转动周期ti,j,n,计算获得叶片转速,
15、所述的方法中,第四步骤s4中,利用一组内连续相邻的三个周向叶端定时传感器第i号、第i+1号和第i+2号,i=1,2,…,np-2,采集第g号叶片在第n圈内的实际到达时间ti,g,n,tj,g,n,tk,g,n,计算出所述相邻两个叶端定时传感器间的叶尖振动速度根据叶尖振动速度计算叶片的叶尖在第n圈内的第i个振动加速度值其中表示为:其中,r为叶片叶尖的旋转半径,fω为叶片转速频率,θi为第i个传感器的安装角度,ti,g,n表示第i个传感器在第n圈采集的第g号叶片的到达时间。
16、所述的方法中,第五步骤s5中,建立异步振动参数辨识模型,即叶片振动方程为:式中:m为质量矩阵,c为阻尼矩阵,k为刚度矩阵,ω1异步振动激励力基频ω1=2πeo1fr,激励阶次eon=neo1,振动方程的解为
17、所述的方法中,第六步骤s6中,通过全叶片谱方法来辨识异步振动频率和幅值,叶片响应的幅值sk和相位φk表示为:式中:nb为叶盘上的叶片总数;nd为与叶盘振动相关的节径,正向行波nd为正,反向行波nd为负;and和ψnd为叶盘节径为nd时的响应幅值和相位;ndmax对于偶数叶片,满足等式ndmax=nb/2,对于奇数叶片,满足等式ndmax=(nb-1)/2;ndmin对于偶数叶片,满足等式ndmin=1-nb/2,对于奇数叶片,满足等式ndmax=-(nb-1)/2,对于旋转参考系中的单个激励频率,可对上式进行修正,获得叶片响应为:式中fr为叶盘的转频。假设所有叶片以相同频率振动,对连续叶片的振动位移进行空间傅里叶变换可以得到在测量参考系下的行波响应,行波频率ftw满足ftw=fb+ndfr,fb为叶片的振动频率。此即全叶片谱分析方法。
18、所述的方法中,第七步骤s7中,截取多段相同长度的叶端定时加速度数据作为快拍,第q个快拍矢量表示为:a(q)=[a(tj(q-1)+1) a(tj(q-1)+2) … a(tj(q-1)+m)],j为周向布局的叶端传感器数目;m为快拍矢量的长度,满足mod(m,j)=0,构建快拍矩阵表示为a=[a(1)a(2) … a(q)];根据快拍矩阵计算自相关矩阵,当叶端定时数据为加速度时,自相关矩阵为对自相关矩阵进行特征值分解,将特征值从大到小排序,前l个特征值对应的特征向量构成信号子空间s,其余m-l个特征值对应的特征向量构成噪声子空间g,且满足:stg=0,通过设定阈值p,根据式确定真实信号的频率分量数l,设定频率遍历区间及步长,进行频率遍历,给定频率f的导向矢量表达式为:其中τm为每组快拍中第m个时间值,给定频率对应的伪谱幅值表达式如下:
19、所述的方法中,第七步骤s7中,为了能采用music方法辨识叶片异步振动振幅,需要对叶端定时信号的自协方差矩阵进行分析,将快拍矢量表示为:bλfa+w(q),式中b=[b1(q) b2(q) … bk(q)],其中
20、w(q)=[w(tq1) w(tq2) … w(tqm)]t,因此,样本自相关矩阵可以表示为式中λa为各阶振幅的平方构成的对角阵,即满足为w(t)的方差;im为m阶单位阵。在样本协方差矩阵中λa包含了叶片振动幅值信息,得到叶片振动幅值
21、一种实施所述基于叶尖振动加速度的叶端定时异步振动参数辨识方法的系统包括,
22、传感器优化布局模块,其配置为确定周向安装叶端定时传感器的个数以及各叶端定时传感器的安装角度、位置布局;
23、叶片到达时间测量模块,在变转速工况下通过各叶端定时传感器测量各叶片通过其的到达时间序列;
24、叶尖振动加速度计算模块,其连接叶片到达时间测量模块,叶尖振动加速度计算模块利用到达时间和三个相邻传感器的安装角度间隔计算叶尖振动加速度;
25、叶片异步振动参数辨识模块,其连接所述叶尖振动加速度计算模块,叶片异步振动参数辨识模块利用全叶片谱分析方法或music方法辨识出转子叶片异步振动频率,利用辨识结果通过振幅提取多重信号分类方法求得叶片旋转失速、喘振工况下的振动幅值。
26、有益效果
27、本发明可以在航空发动机旋转叶片发生旋转失速、喘振、声共振等异步振动时,无需传统的参考转速传感器,可以在恒转速或变转速的不同工况下通过各传感器所测的到达时间序列以及各到达角度关系,通过拟合获得参考转速信号,通过叶端定时传感器的到达时间与安装角度关系,通过计算获得叶尖振动加速度,并代替传统的叶尖振动位移物理量,将叶片振动位移域转移到加速度域分析,可以提高叶片振动在高频中的识别精度,与传统叶尖振动位移计算相比省略参考转速的计算过程,进一步减小叶端定时测量过程中的不确定性,提高叶片异步振动参数辨识的准确性。
- 还没有人留言评论。精彩留言会获得点赞!