一种混合式抗磁悬浮加速度传感器及其测量方法
本发明涉及精密仪器仪表领域,具体涉及一种混合式抗磁悬浮加速度传感器及其测量方法。
背景技术:
1、三坐标测量机是一种集合了机械、电路、光学、控制和计算机等技术的现代大型精密智能测量仪器,在科学研究和生产制造中有广泛应用。随着社会的不断发展,传统意义上测量精度在微米级及以下的三坐标测量机已不能满足需要,需求推动技术发展,因此产生了具有纳米级分辨率的三坐标测量机。为了实现纳米三坐标测量机的高精度稳定测量,需要对其所处的测量环境进行控制,环境扰动包括温度和振动两个方面的影响。振动方面使用高精度加速度计实现低频微小振动的高精度检测。
2、振动加速度计和振动位移计是两种常见的接触式振动检测仪器,其中加速度计是一种广泛应用于振动检测的传感器,这是由于加速度计具有高准确度、宽频带、安装方便等优点。最简单的加速度计设计,即由位移传感器检测其内部质量块相对于基座的位移,进而得到待检测加速度。现在大多使用应变式传感器、电阻式传感器、电容式传感器、电感式传感器、电磁式传感器以及压电式传感器等实现这个相对位移的检测。
3、抗磁悬浮是利用抗磁性物质的抗磁性使其在磁场中稳定悬浮的技术,最初于18世纪年发现,但由于抗磁力自身非常微弱,研究人员当时并未对抗磁悬浮进行深入的研究。直到近30年来,随着微细制造与强磁场技术的发展,抗磁悬浮相关研究及应用才开始兴起。现有研究的加速度计无法满足高精密及超高精密仪器的检测需求。
技术实现思路
1、本发明的目的在于针对现有技术的不足,提出了一种混合式抗磁悬浮加速度传感器及其测量方法;实现了微小加速度高精度测量功能,克服了现有高精度加速度传感器普遍存在的摩擦问题,在微小加速度的测量具备天然的优势。
2、本发明为解决上述技术问题,采用以下技术方案:
3、一种混合式抗磁悬浮加速度传感器,由机械系统和测量系统组成;
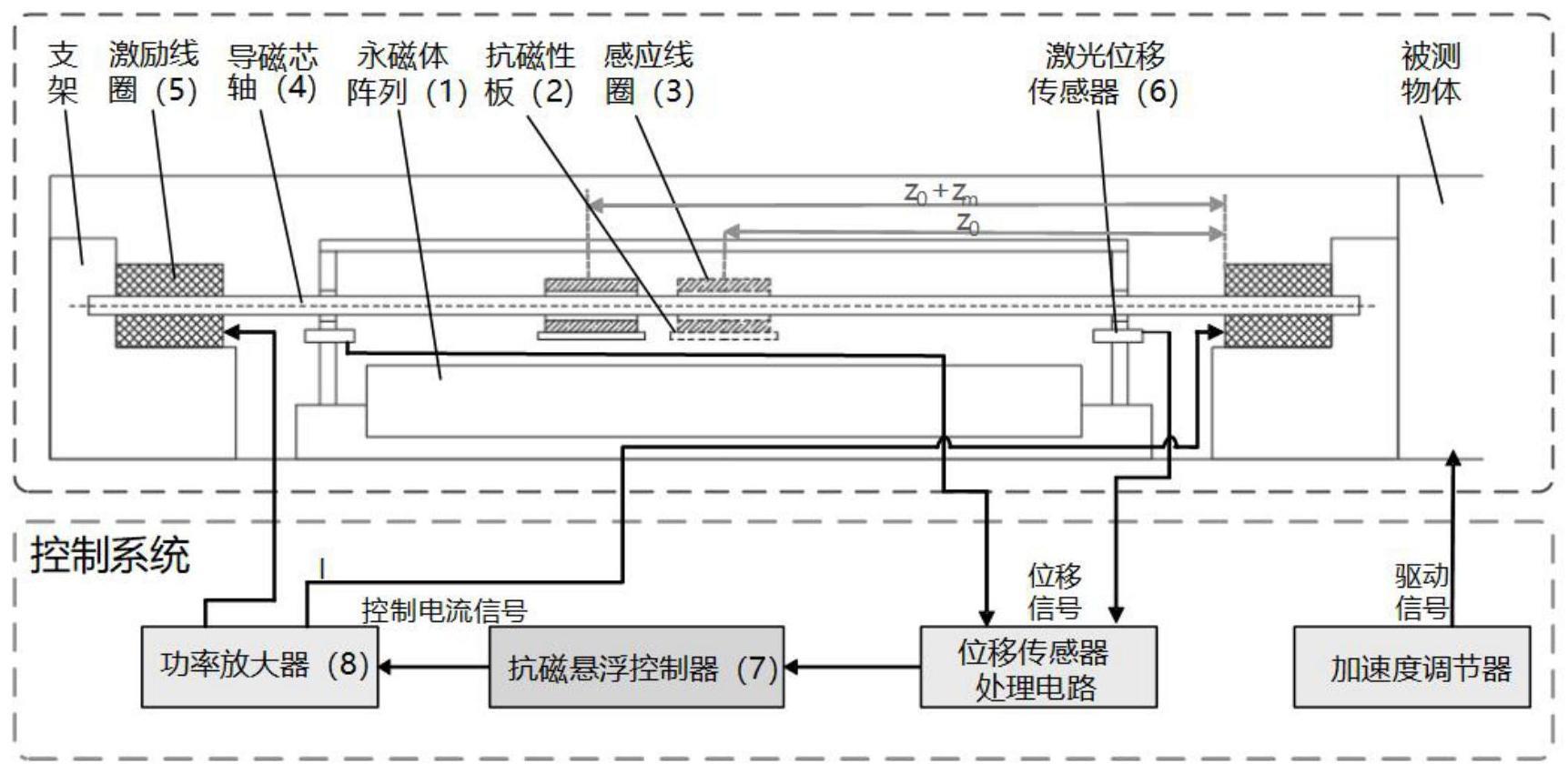
4、所述机械系统具体包括:“opposite”排布形式的充磁磁极阵列、采用抗磁性材料制作的矩形悬浮板以及感应线圈;
5、在所述机械系统中,“opposite”排布形式的充磁磁极阵列由五块长度、宽度、高度均相同的矩形磁体组成,中心磁体充磁方向为竖直向上,相邻磁体充磁方向相反,且磁化强度大小相等,无需外力即可自然吸合在一起;
6、在所述机械系统中,“opposite”排布形式的充磁磁极阵列中间区域自发产生驼峰型磁场,矩形悬浮板在驼峰型磁场中激发磁势能,矩形悬浮板与感应线圈的总势能(由两者磁势能与重力势能组成)存在极小值点,根据最小势能原理,矩形悬浮板与感应线圈可被动稳定悬浮于总势能极小值点处,由此确保了传感器悬浮功能的实现,避免了摩擦带来的负面影响,确保加速度传感器敏感元件(由矩形悬浮板与感应线圈组成)的自由响应。“opposite”排布形式的充磁磁极阵列呈对称布置,矩形悬浮板的竖直向悬浮高度由“opposite”排布形式的充磁磁极阵列和矩形悬浮板特性决定;
7、所述测量系统具体包括:导磁芯轴、激励线圈、激光位移传感器、控制器、功率放大器;
8、在测量系统中,导磁芯轴穿过感应线圈,激励线圈采用差动式结构,即采用两组激励线圈,分别绕在导磁芯轴的两端,呈对称分布。差动式结构的激励线圈的差动原理是对于控制器输出的同一控制量,分别经加法电路及减法电路的处理产生差值为两倍控制量的两路输出信号,两路信号分别输入到上下两组激励线圈中,感应线圈置于两组激励线圈中间,两组激励线圈对感应线圈产生的作用力方向相反,感应线圈所受合力为两种作用力的差值,且差值大小与控制量有关。通过差动式结构可抵消偏置电流所带来的基准值的影响。激光位移传感器将矩形悬浮板的位置信号实时转化为电信号,传输到控制器,控制器根据激光位移传感器测量的电信号与预设电信号的差值产生使差值为零的控制量输入到功率放大器,经功率放大器的放大作用产生对应的控制电流,输入到激励线圈中,根据交流感应直线推进技术原理,感应线圈受激励线圈中控制电流的作用感应出相应的电磁力,使矩形悬浮板的位置发生变化,直至矩形悬浮板稳定于预设位置,即激光位移传感器测量的电信号与预设电信号的差值为零。
9、进一步的,可通过检测矩形悬浮板位移来测量被测物体的加速度,矩形悬浮板的运动位移方程为:
10、x=xb+xr
11、
12、式中,xb为被测物体运动位移,xr为矩形悬浮板相对于传感器基座的位移,x为矩形悬浮板运动位移。
13、由牛顿第二定律可知,作用在加速度计矩形悬浮板的力可表示为:
14、
15、i=kmx
16、式中,m为矩形悬浮板的质量,k1为电流刚度,k2为位移刚度,c为阻尼系数,i为控制电流,km为功率放大系数。可得:
17、
18、
19、式中,a即为被测物体加速度,对上述进行拉普拉斯变换,可求得被测物体加速度与矩形悬浮板相对位移间的关系为:
20、
21、在传感器调试阶段,通过实验测试传感器输入输出曲线,测量范围、灵敏度、分辨率等性能参数时,被测物体给出的激励为传感器的输入,矩形悬浮板的相对位移为传感器的输出;调试结束后用于实际应用时,以已确定的性能参数为载体,根据待测运动物体引起的位移的变化输出对应的加速度值。
22、一种抗磁悬浮加速度传感器测量加速度的测量方法,具体包括以下几个步骤:
23、步骤s1、开展一种混合式抗磁悬浮加速度传感器的安装;首先将导磁芯轴穿过与矩形悬浮板粘连的感应线圈,将差动式结构的激励线圈绕至导磁芯轴两端,固定导磁芯轴,通过调节“opposite”排布形式的充磁磁极阵列与矩形悬浮板之间的距离,待感应线圈稳定悬浮与导磁芯轴无接触后,固定“opposite”排布形式的充磁磁极阵列,调整激光位移传感器的位置,使其发射的激光对准矩形悬浮板的正面,保证激光位移传感器与矩形悬浮板之间的距离在激光位移传感器线性工作区,完成混合式抗磁悬浮加速度传感器的安装;
24、步骤s2、开展混合式抗磁悬浮加速度传感器的调试;通过被测物体给出不同激励改变加速度的大小,测量并记录此时激光位移传感器记录的相对位移大小,绘制输出相对位移随加速度变化的曲线,多次重复实验,获得平均曲线,揭示混合式抗磁悬浮加速度传感器测量范围、线性区域、线性度、灵敏度、分辨率、响应时间、重复率等性能参数,完成混合式抗磁悬浮加速度传感器的调试;
25、步骤s3、开展混合式抗磁悬浮加速度传感器的实际测试;通过改变被测物体的激励并记录实际加速度的大小,同时记录以调试过程中确定的性能参数为载体的混合式抗磁悬浮加速度传感器所测得的测量加速度,对比分析实际加速度与测试加速度,获得测量精度,完成混合式抗磁悬浮加速度传感器的实际测试。
26、与现有技术相比,本发明的技术方案具有以下有益效果:
27、(1)实现了微小加速度高精度测量功能。抗磁悬浮克服了现有高精度加速度传感器普遍存在的摩擦问题,实现了传感器敏感元件的自由响应,低刚度的特性使传感器具有极高的灵敏度,在微小加速度的测量具备天然的优势;
28、(2)抗磁悬浮矩形板的抗磁悬浮力与矩形板重力比同矩形板表面积呈正相关,因此在尺度效应下,抗磁悬浮力与矩形板重力之比随尺度降低而增大,可实现矩形板的微型化;
29、(3)抗磁悬浮不受earnshaws定理的限制,无需任何能量输入,即可以实现常温、被动、无摩擦、静态稳定悬浮,极大程度地简化传感器系统的结构与成本;
30、(4)便于加工,混合式抗磁悬浮加速度传感器关键部件(机械系统各组成部件)形状规则,便于加工实现。
- 还没有人留言评论。精彩留言会获得点赞!