一种基于多工程设备防撞检测方法及系统与流程
本发明涉及防撞检测的,具体为一种基于多工程设备防撞检测方法。
背景技术:
1、防撞检测技术广泛应用于工程设备、机器人、无人车等领域,旨在避免碰撞事故,保护设备和人员的安全。在工业生产、建筑工地、物流运输等场景中,存在大量的移动设备和物体,而它们之间的碰撞可能导致人员伤害、设备损坏和生产中断等严重后果。因此,防撞检测技术的应用具有重要意义,可以提高工作环境的安全性、生产效率和设备的可靠性
2、尽管防撞检测技术已经取得了一定的发展和应用,但仍然存在一些问题和缺陷需要解决:当前防撞检测技术在检测精度和可靠性方面还有提升的空间。特别是在复杂环境下,如动态障碍物、不同形状和尺寸的物体等情况下,检测算法的准确性和稳定性仍然是一个挑战;防撞检测技术在复杂环境中的适应性仍有待改进。例如,在光照不均匀、天气恶劣、多障碍物交叉等情况下,传感器的性能和算法的鲁棒性可能受到影响,导致检测结果不准确或无法正常工作;一些防撞检测系统需要在实时性方面进行改进。在高速运动、复杂路径规划和多目标跟踪等场景下,需要快速且准确地检测和判断,以及迅速响应避免碰撞;防撞检测技术通常需要多种传感器、算法和决策模块的融合,以实现全面的防撞能力。如何优化传感器数据的融合、算法的协同工作以及决策模块的效率和准确性是一个挑战。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述存在的问题,提出了本发明。
3、因此,本发明提供了一种基于多工程设备防撞检测方法的方法,通过遥感技术获取设备的实时位置信息,并建立空间坐标体系,能够使得设备间的安全临界距离的计算结果更加准确,以确保后续防撞规则更加完善,能够保证设备的安全工作。
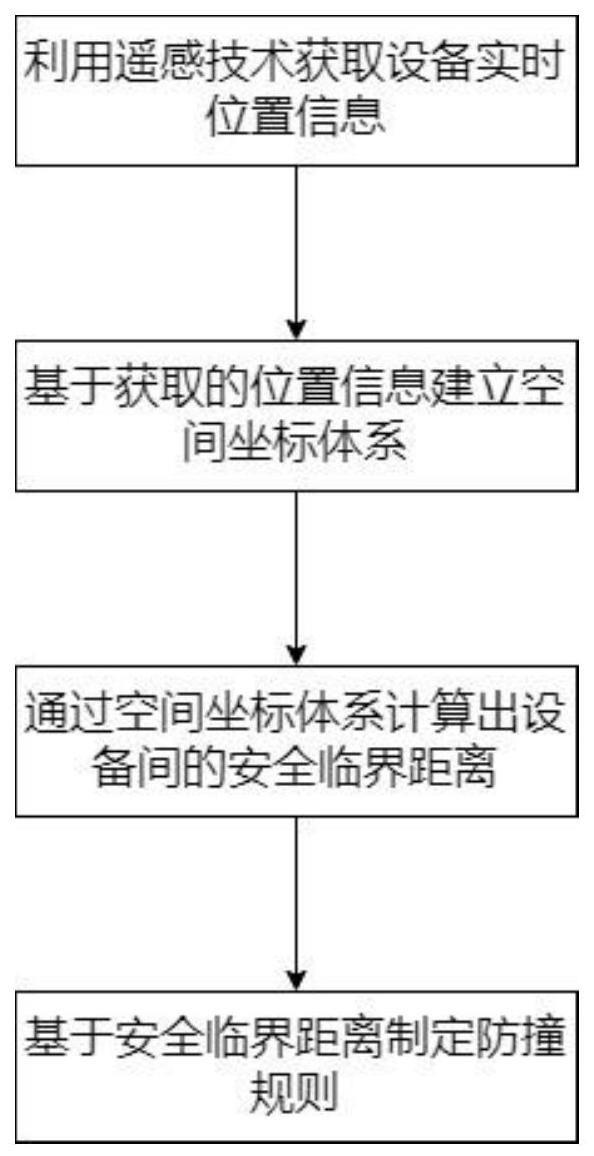
4、为解决上述技术问题,本发明提供如下技术方案:一种基于多工程设备防撞检测方法,包括以下步骤,
5、利用遥感技术获取设备实时位置信息;
6、基于获取的位置信息建立空间坐标体系;
7、通过空间坐标体系计算出设备间的安全临界距离;
8、基于安全临界距离制定防撞规则。
9、作为本发明所述一种基于多工程设备防撞检测方法的一种优选方案,其中:所述利用遥感技术获取设备实时位置信息是通过全球定位系统进行设备实时位置信息获取的,所述设备实时位置信息包括,设备位置的经度、设备位置的纬度以及设备位置的海拔高度。
10、作为本发明所述一种基于多工程设备防撞检测方法的一种优选方案,其中:所述基于获取的位置信息建立空间坐标体系是笛卡尔积将设备位置的经度以及设备位置的纬度转换为空间坐标体系中的x、y、z坐标,具体实现公式如下:
11、x=(r+h)*cos(lat)*cos(lon)
12、y=(r+h)*cos(lat)*sin(lon)
13、z=(r*(1-e2)+h)*sin(lat)
14、其中,r表示曲率半径,e表示椭球体的偏心率,h表示设备所在位置的海拔高度,lat表示设备所在位置的纬度,lon表示设备所在位置的经度。
15、作为本发明所述一种基于多工程设备防撞检测方法的一种优选方案,其中:所述通过空间坐标体系计算出设备间的安全临界距离包括,设备运行轨迹为直线运行的安全临界距离以及设备运行轨迹为圆周运动的安全临界距离;所述设备运行轨迹为直线运行的安全临界距离是设备间的空间距离与设备单位时间内运行距离之差所得;所述设备运行轨迹为圆周运动的安全临界距离是设备间的空间距离与设备运行弧长之差所得。
16、作为本发明所述一种基于多工程设备防撞检测方法的一种优选方案,其中:所述通过空间坐标体系计算出设备间的安全临界距离的具体过程如下:
17、当两设备的空间坐标分别为a(x1,y1,z1),b(x2,y2,z2)时,两设备间的空间距离时通过欧几里得距离公式计算所得,具体如下:
18、
19、其中,l表示设备间的空间距离,x1,x2,y1,y2,z1,z2分别表示设备的空间坐标;
20、当两设备的运行轨迹为圆周运动时,两设备之间的实时弧长距离为两设备间在圆周运行轨迹上的实时距离,具体计算公式如下:
21、l=r*θ
22、θ=atan2(y1-y2,x1-x2)
23、其中,l表示两设备间的弧长,θ表示两设备间的夹角,atan表示反正切函数,r表示半径;
24、所述设备运行轨迹为圆周运动的安全临界距离的具体计算公式如下:
25、
26、其中,l表示设备间的空间距离,x1,x2,y1,y2,z1,z2分别表示设备的空间坐标,l表示两设备间的弧长,θ表示两设备间的夹角,atan表示反正切函数,r表示半径。
27、作为本发明所述一种基于多工程设备防撞检测方法的一种优选方案,其中:所述设备运行轨迹为直线运行的安全临界距离是设备间的空间距离与设备单位时间内运行距离之差所得,具体计算过程如下:
28、当两设备的空间坐标分别为a(x1,y1,z1),b(x2,y2,z2)时,两设备间的空间距离是通过欧几里得距离公式计算所得,具体如下:
29、
30、其中,l表示设备间的空间距离,x1,x2,y1,y2,z1,z2分别表示设备的空间坐标;
31、当设备的运行轨迹为直线运动,且运行速度为v,运行方向为相向运动时,两设备间实时距离为两设备在单位时间内行进的距离,具体计算公式如下:
32、s=2vt
33、其中,v表示设备运行的速度,t表示运行的时间,s表示行进的路程;
34、所述设备运行轨迹为直线运行的安全临界距离的具体计算公式如下:
35、
36、其中,l表示设备间的空间距离,x1,x2,y1,y2,z1,z2分别表示设备的空间坐标,v表示设备运行的速度,t表示运行的时间,s表示行进的路程。
37、作为本发明所述一种基于多工程设备防撞检测方法的一种优选方案,其中:所述基于安全临界距离制定防撞规则具体如下:
38、当设备运行轨迹为圆周运动时,设备间的安全临界距离为ls,则有:
39、当ls=0时,表示两设备已经发生碰撞,两设备立即停止工作,并启动声光报警,提醒相关工作人员及时处理;
40、当k>ls>0时,k为人为设定的设备发生碰撞危险的范围,表示两设备未发生碰撞,但有发生碰撞的危险,两设备减缓工作速度,并启动声光报警,提醒相关工作人员注意危险;
41、当ls>k时,表示两设备未发生碰撞,且没有发生碰撞的危险,两设备保持正常工作速度正常工作;
42、当设备运行轨迹为直线运动时,设备间的安全临界距离为ls′,则有:
43、当ls′=0时,表示两设备已经发生碰撞,两设备立即停止工作,并启动声光报警,提醒相关工作人员及时处理;
44、当k>ls′>0时,k为人为设定的设备发生碰撞危险的范围,表示两设备未发生碰撞,但有发生碰撞的危险,一个设备正常工作,另一个设备放缓工作速度,并启动声光报警,提醒相关工作人员注意危险;
45、当ls′>k时,表示两设备未发生碰撞,且没有发生碰撞的危险,两设备保持正常工作速度正常工作。
46、本发明的另外一个目的是提供一种基于多工程设备防撞检测系统,其能通过实时获取设备的位置信息,并计算出设备间的安全临界距离,能够有效降低工程设备之间发生碰撞的风险,通过及时检测和预警,防止工程设备之间发生碰撞和碰撞导致的损坏,有助于减少设备维修和维护的成本,并避免因设备损坏而导致的停工时间,提高工程进度和效率,通过准确获取设备的实时位置信息,可以对设备进行智能调度和资源分配,还可以为设备提供更准确的导航和路径规划,优化工程作业流程。
47、作为本发明所述一种基于多工程设备防撞检测系统的一种优选方案,其中:包括,位置信息模块,空间坐标体系模块,安全临界距离计算模块,防撞规则制定模块;
48、所述位置信息模块,用于获取设备的实时位置信息;
49、所述空间坐标体系模块,用于建立关于设备的空间坐标体系;
50、所述安全临界距离计算模块,用于计算出设备运行的安全临界距离;
51、所述防撞规则制定模块,用于制定设备运行的防撞规则。
52、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现变电站低压交流失压事件判别方法的步骤。
53、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现变电站低压交流失压事件判别方法的步骤。
54、本发明的有益效果:本发明通过利用遥感技术,能够实时获取多个工程设备的位置信息,为后续的实时检测提供了必要的数据来源,通过建立空间坐标体系,能够确保设备的位置信息的准确性,能够更加准确的计算出设备间的安全临界距离,通过防撞规则的建立,能够确保设备在运行过程中始终遵守安全距离,减少碰撞和事故的风险。
- 还没有人留言评论。精彩留言会获得点赞!