一种低空林业监测遥感无人机路径多目标规划方法与流程
本发明涉及低空遥感无人机路径规划,更具体的说,涉及一种低空林业监测遥感无人机路径多目标规划方法。
背景技术:
1、不同于主要通过高空卫星影像、并辅以中空航空影像补充关键区域的大范围高空林业遥感监测,林下资源监测属于低空林业监测领域,导致传统监测手段无法对林下进行精细化监测。低空遥感无人机是利用无线电遥控设备和机载程序控制装置操纵的小型航空器,具有体积小、造价低、使用方便、环境适应性强等优点,能够对低空域内进行精细化的监测。同时,无人机应用低空遥感领域具有响应快速、图像分辨率高、拓展能力强、运营成本低等特点,在林下资源监测管理中具有广阔的应用前景。
2、低空遥感无人机在运行时,一个关键制约因素在于飞行路径的规划。低空遥感环境中,无人机的应用场景中不仅存在固定障碍物(如树木、建筑物等),同时存在各种突发情况(如飞鸟、气球、环境风等),飞行路径的优劣直接决定了低空遥感无人机的任务执行效率,因此需要在三维复杂空间内规划出合理、高效的路径。
3、传统的无人机路径规划主要基于可视图法、a*算法、dijkstra算法:根据预先获取的地图数据,利用上述算法获取一个初始路径方案,然后实时探知运行环境的变化,在初始路径方案基础上进行局部调整,以获得最终运行路径。然而传统路径规划方法对于初始地图的要求极高,如果无法事前获取任务场景的详细地形、环境的地图信息,则无法有效的设定初始路径方案;同时传统方法的计算效率低,导致应用场景中出现瞬时、复杂环境变化时,无法有效的快速调整后续路径。而低空遥感场景下,无人机难以获取详细的三维初始地图信息,且在任务执行过程中,也容易受到诸如飞鸟、漂浮物、侧向风等环境干扰因素。因此,针对低空遥感应用场景下的无人机路径规划问题,需要开展不依赖于精细预设地图的快速路径规划。
4、无人机在沿规划路径运行时,沿路径运行时所使用的能源、所耗费的时间、无人机自身的存活率都是评价路径优劣的指标,而这些指标间存在复杂的互耦合关系,无法通过常规解耦手段将这些指标合成作为一个指标来衡量规划路径的优劣。因此可使用多目标优化方法进行路径规划快速求解,提高最终路径方案的规划效率和精度。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种低空林业监测遥感无人机路径多目标规划方法,解决了当前低空遥感无人机路径规划过程中效率低下、精度不高的问题,提高了计算效率及准确率。
2、本发明解决其技术问题所采用的技术方案是:一种低空林业监测遥感无人机路径多目标规划方法,所述方法包括以下步骤:
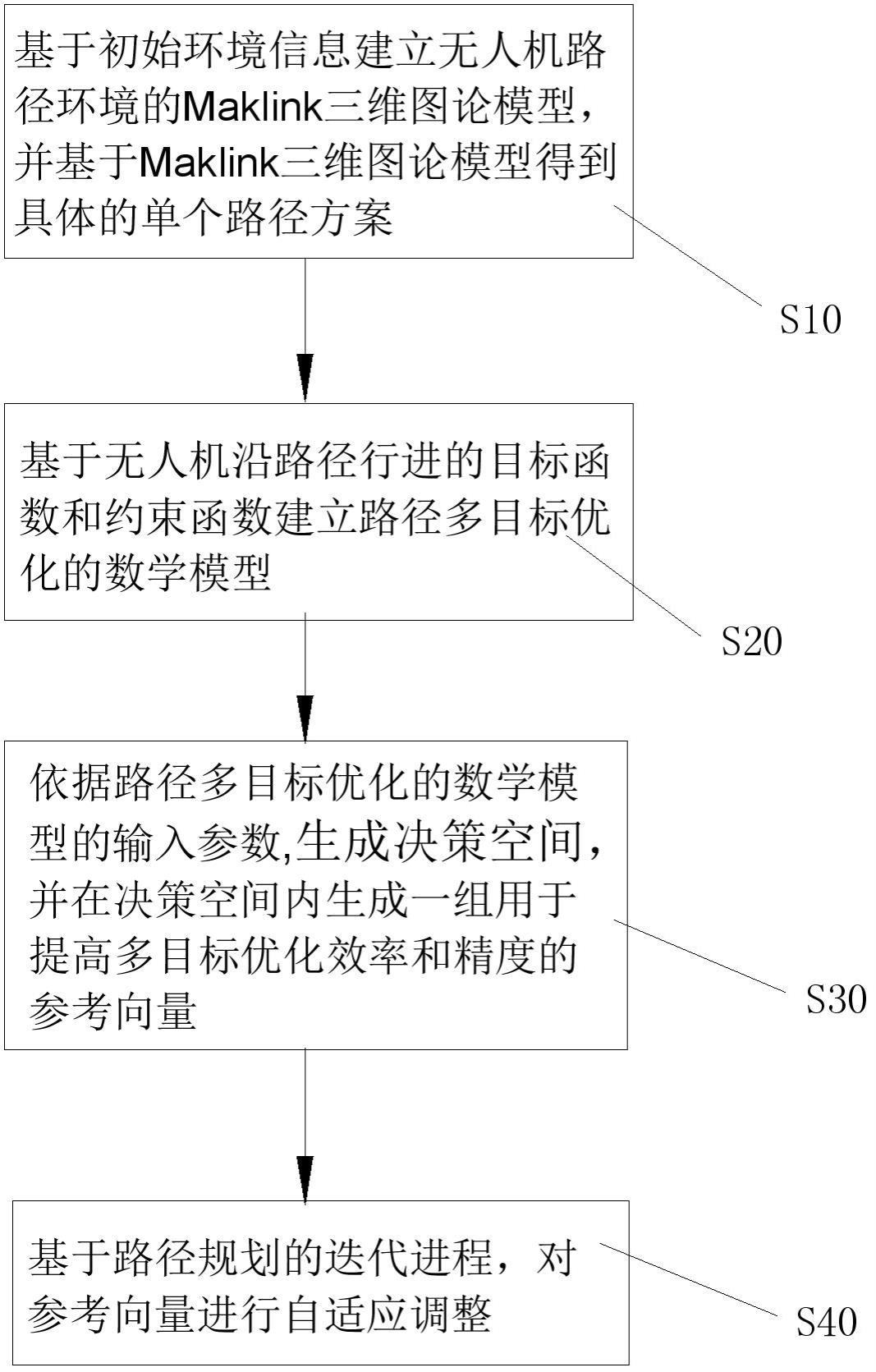
3、s10,基于初始环境信息建立无人机路径环境的maklink三维图论模型;并基于maklink三维图论模型得到具体的单个路径方案;所述初始环境信息包括无人机初始位置、任务目标位置以及能够获得的三维地图信息;
4、s20,基于无人机沿路径行进的目标函数和约束函数建立路径多目标优化的数学模型;所述目标函数包括无人机沿路径行进时所需的时间、耗费的能源以及无人机存活率;所述约束函数为无人机路径中的干扰运行因素;
5、s30,依据构成路径多目标优化的数学模型的目标函数,生成由目标函数上下限所构成的数学空间,即决策空间,并在决策空间内生成一组用于提高多目标优化效率和精度的参考向量;
6、s40,基于路径规划的迭代进程,对参考向量进行自适应调整,最终迭代得到路径方案的帕累托优化解集。
7、进一步的,步骤s20中,所述建立路径多目标优化的数学模型具体步骤如下:
8、s201,利用预设的地图信息和无人机通过机载摄像头获取所在空间信息,通过slam手段完成所处的物理空间建模后,划分出三维空间网格,后续基于maklink图论在三维空间网格上设立路径,并将路径方案转化为数学形式:,其中指代路径方案的第k个设计变量;
9、s202,根据任务细节和运行环境,将运行环境中的障碍物视作路径多目标优化规划时的约束函数,设置无人机沿路径行进时所需的时间、耗费的能源和自身存活率,作为评判路径的多目标函数,确定路径方案数学形式x的设计变量上下限;其中,指代对路径方案x进行长度积分得到的路径实际长度,指代对路径某一点进行微分得到的路径长度微元,指代路径方案x的速度表达式,指代对路径某一点进行微分得到的瞬时速度微元,指代基于路径某一点的瞬时速度微元计算得到的能源消耗量,表明无人机存活率正比于路径x中约束违背量g的倒数,为存活率控制数;
10、s203,基于设计变量上下限初始化设计变量空间ω,形成路径规划的多目标优化数学模型;所述路径规划的多目标优化数学模型为:
11、,
12、所述约束函数为:,其中n指代约束函数的个数,x指代路径方案的数学形式,指代第i个约束函数,具体包含无人机沿路径行进时遇到的障碍物,指代第i个约束函数的控制系数。
13、进一步的,初始路径的多目标函数和约束函数值的计算方法如下:根据无人机运行时的路径方案的设计变量维数k,在确定的设计变量空间ω内进行优化拉丁超立方采样,所述采样数量为3k+2个样本点,这些样本点构成路径多目标优化规划的计算种群;每个样本点根据步骤s201中的方法转化为初始路径,并计算相应的多目标函数和约束函数值;其中,i=1,2,…,3k+2.
14、进一步的,步骤s30中,生成决策空间,并在决策空间内生成一组用于提高多目标优化效率和精度的参考向量的具体方式为:根据在步骤s202中计算得到的所有样本点的三个多目标函数值的上下极值,确定出决策空间,并在决策空间内基于标准边界交叉法生成一组初始参考向量,参考向量数量为,其中k为设计变量维数。
15、进一步的,所述计算种群中每个样本点对应的多目标函数值在决策空间内与所有参考向量间的夹角值,并依据夹角最小值,将每个样本点依附到该最小值对应的参考向量。
16、进一步的,步骤s40中,对参考向量进行自适应调整的具体步骤如下:
17、s401,对所有参考向量管辖下的样本点利用差分进化算法中的交叉、变异、选择操作进行进化,生成新的一组备用子代样本点;
18、s402,依据帕累托支配准则,对种群进行迭代;
19、s403,基于新的种群重新计算决策空间大小,并在新的决策空间内生成一组参考向量;
20、s404,循环s401、s402以及s403,若满足maklink图论计算路径的次数达到设定值,则终止循环,输出当前种群作为多目标解;否则继续循环s401、s402以及s403。
21、进一步的,步骤s401中,对所有参考向量管辖下的样本点进行进化的具体方法包括:先将每个参考向量管辖的样本点放入一个空白进化池,然后找出该参考向量相邻的参考向量,并将相邻的参考向量管辖的样本点加入上一个进化池,对进化池采用差分进化,获得与进化池同规模数量的样本点;最后将这些样本点存入备用子代样本点集。
22、进一步的,步骤s402中,对计算种群进行迭代的具体方式包括:将父代和备用子代样本点合并,并进行帕累托支配排序,根据排序结果,保留排序靠前且与种群规模相同的样本点,这些保留的样本点作为新的种群。
23、进一步的,步骤s403中,所述参考向量的生成方法与s30中参考向量的生成方法相同。
24、本发明的有益效果是:本方案低空林业监测遥感无人机路径多目标规划方法,有效的改善了低空遥感无人机路径多目标规划过程中效率低下、精度不高的问题,从而提高了计算效率及准确率。
- 还没有人留言评论。精彩留言会获得点赞!