一种基于剩余电量的多AGV冲突避免方法与流程
本发明涉及自动驾驶领域,特别是一种基于剩余电量的多agv冲突避免方法。
背景技术:
1、自动引导搬运车系统(agvs)在智能仓储系统有着十分重要的作用,其设计与研发符合物流系统智能化的发展要求。通过合理规划和调度,能够替身仓储系统的货物周转率和分拣准确率,降低物流成本。
2、随着科学技术的进步与发展,路径规划技术面对的环境更加复杂多变,这对路径规划算法的迅速响应有了更高的要求。因为路径规划算法的性能对agv调度系统有着十分重要的影响,特别是当环境的复杂程度上升和agv数量增多时,容易出现交通堵塞的情况,使得agv的效率大打折扣。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述和/或现有的一种基于剩余电量的多agv冲突避免方法中存在的问题,提出了本发明。
3、因此,本发明所要解决的问题在于如何提供一种基于剩余电量的多agv冲突避免方法。
4、为解决上述技术问题,本发明提供如下技术方案:一种基于剩余电量的多agv冲突避免方法,其包括,
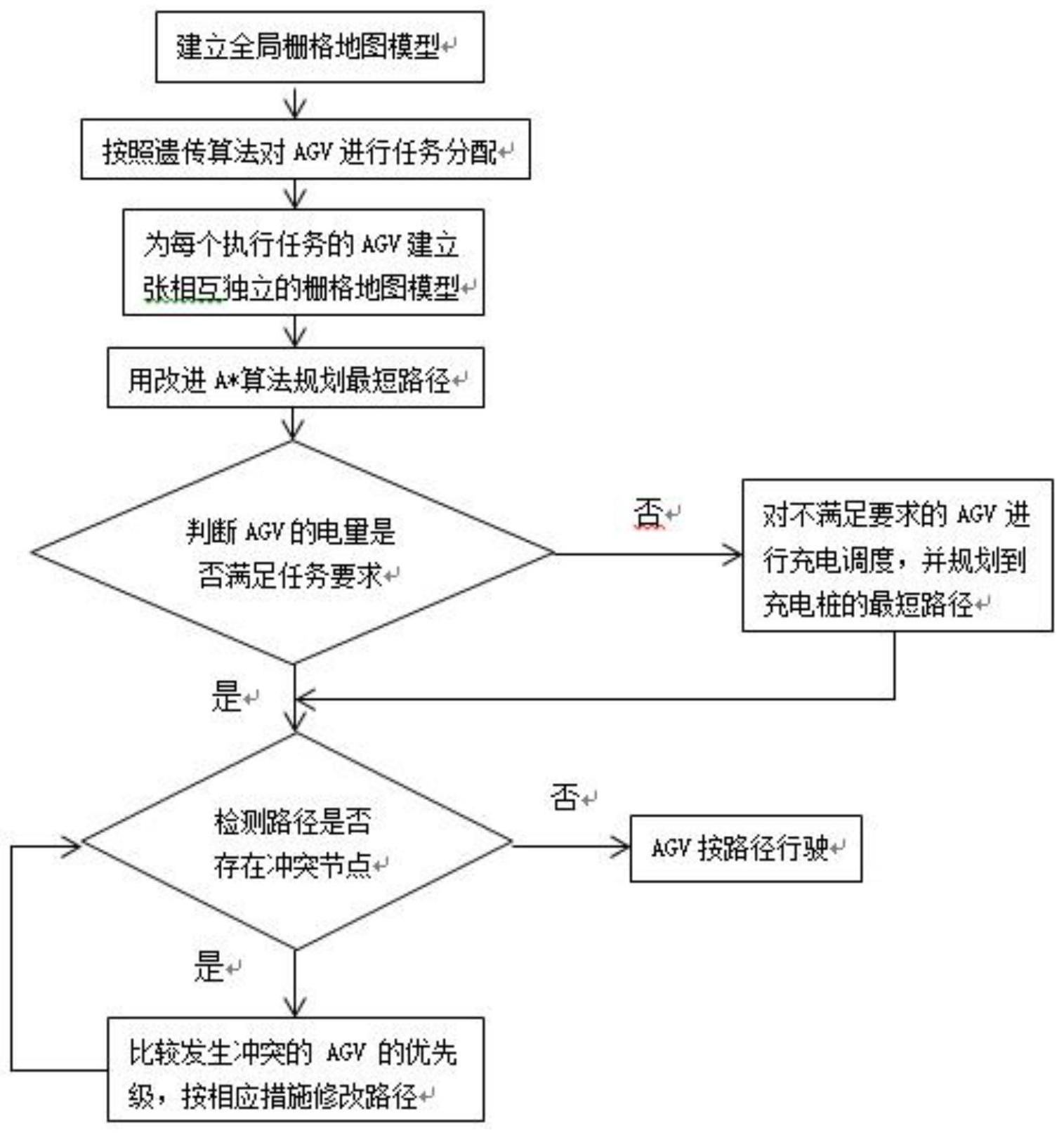
5、建立一张全局栅格地图模型;
6、根据遗传算法为agv分配任务;
7、对上述的agv车辆采用三层法,为agv进行路径规划和充电调度,找寻出一条全局静态无冲突路径;
8、agv按照规划好的路径执行任务。
9、作为本发明所述一种基于剩余电量的多agv冲突避免方法的一种优选方案,其中:所述建立一张全局栅格地图模型包括,全局栅格地图模型是为agv分配任务使用的。
10、作为本发明所述一种基于剩余电量的多agv冲突避免方法的一种优选方案,其中:所述三层法包括,底层agv路径规划系统、中层agv充电调度系统和顶层agv路径冲突节点检测系统;在底层路径规划系统中采用改进a*算法,规划出agv完成任务的最短路径;
11、在使用三层法为agv进行路径规划时,为每个执行任务agv的各自建立一张栅格地图模型,确保agv路径规划时的相互独立性;
12、栅格地图模型相比较于全局栅格地图模型,增加阻塞节点模型和等待节点模型,更加符合实际情况。
13、作为本发明所述一种基于剩余电量的多agv冲突避免方法的一种优选方案,其中:所述agv按照规划好的路径执行任务包括,通过底层agv路径规划系统计算出所有agv的最短路径后,将数据传输agv充电调度系统,检查agv是否有充足的电量来执行当前的任务,若某agv的电量不足,则将其调去充电并删除其的最短路径,重新规划其去充电桩的最短路径,再将数据传输到顶层agv路径冲突节点检测系统,顶层agv路径冲突节点检测系统按照时间顺序逐步比对agv路径节点检测存在的冲突节点,若检测到节点w存在冲突,判断冲突类型,计算发生冲突的agv车辆的行驶优先级,优先级高的行驶路径不变,优先级低的修改路径以避免冲突,若是两辆以上的agv发生冲突,两两之间判断冲突类型,优先解决相向冲突。
14、作为本发明所述一种基于剩余电量的多agv冲突避免方法的一种优选方案,其中:为了防止agv电量过低,在执行任务时停在路上造成阻塞,设置agv最低充电调度电量q1,在agv执行任务前判断当前电量是否充足,充足则执行该次任务,不足则放弃执行此次任务去充电;
15、为了防止agv充电时间过长导致任务堆积和其余agv等待充电的等待时间过长,设置最高充电完成电量q2,agv在充电若电量到达q2则停止充电去执行运输任务,判断公式为:
16、
17、
18、表示k号agv的最短路径中的转弯次数;表示k号agv从当前节点到分拣台接取任务的路径长度;表示k号agv接取任务后从分拣台到目标节点的路径长度;表示执行任务的k号agv当前电量;表示正在充电的k号agv的当前电量;w1表示agv行驶电量损耗率;w2表示agv转弯电量损耗率;mk表示k号agv的负载。
19、作为本发明所述一种基于剩余电量的多agv冲突避免方法的一种优选方案,其中:发生冲突时agv的行驶优先级为
20、
21、公式中,表示k号agv在冲突节点j的行驶优先级;yk是一个0-1整数值,若k号agv在进行路径规划时任务节点和所在节点的横坐标的差值的绝对值小于2,则其值为1,反之则为0;表示k号agv在冲突节点j的剩余行驶路径;ck是一个0-1整数值,若k号agv执行充电任务其值为1,反之则为0;表示k号agv从当前节点到j号节点的路径长度;是一个0-1整数值,若agv发生的是路径相向冲突则其值为1,反之则为0;是一个0-1整数值,若agv发生的是路口节点冲突则其值为1,反之则为0;表示k号agv从当前节点到j号节点的路径长度。
22、作为本发明所述一种基于剩余电量的多agv冲突避免方法的一种优选方案,其中:检测到冲突节点并计算出优先级后,若是相向冲突,则在优先级低的agv对应栅格地图模型中将冲突节点设置为阻塞节点模型,若是等待冲突,则在优先级低的agv对应栅格地图模型中将冲突节点设置为等待节点模型,然后重新规划路径;
23、在解决所有的冲突后,重新检测路径是否会发生冲突,若没有,则按修改好的全局静态无冲突路径行驶,若有,则继续调整修改路径,直至找出一条全局静态无冲突路径为止。
24、作为本发明所述一种基于剩余电量的多agv冲突避免方法的一种优选方案,其中:所述底层路径规划系统包括,采用改进a*算法计算最短路径时,将转弯转换为相应的距离代价;
25、改进a*算法只需要根据agv当前节点和目标节点的横纵坐标的差值来判断搜索方向,并且对转弯节点进行记录,每次只需搜索一个方向的节点并且,agv运输任务时横坐标值优先比较,即横向行驶优先;agv去分拣台取任务时纵坐标值优先比较,即纵向行驶优先。
26、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上所述方法的步骤。
27、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上所述方法的步骤。
28、本发明有益效果为本发明采用三层法对agv进行事先的全局静态路径规划,其中底层所采用的改进a*算法通过采用只朝目标节点方向搜索的方式进行节点搜索有效提高了算法速度和效率;顶层采用的agv路径冲突节点检测系统,通过对所有的agv车辆的路径进行冲突检测,能够及时发现存在的冲突,并基于优先级进行解决冲突,有效避免了agv之间的冲突发生,极大地提高了agv执行任务的整体效率;中层agv充电调度系统根据实际情况对agv进行了充电调度避免了agv电量过低无法完成任务以及避免了agv充电时间过长导致电池损伤、其余待充电agv等待时间过长和货物堆积等情况。
- 还没有人留言评论。精彩留言会获得点赞!