一种基于GNSS和IMU的风机轨迹高频监测方法与流程
本发明涉及风力发电机安全监测,具体涉及一种基于gnss和imu的风机轨迹高频监测方法。
背景技术:
1、风力发电机安全监测是确保风力发电系统稳定运行的关键因素,因此非常重要。风力发电机通常安装在高空和偏远地区,进行维护和修理需要经过危险的爬高和大风等情况,安全监测可以提前发现任何潜在的安全隐患,保障维修人员的安全,另外风力发电机在运行时,需要持续运行超过数十年,如不及时监测,设备老化、结构破损、疲劳等等安全问题很可能出现,从而导致事故的发生。
2、现有技术中的倾角传感器测量法具有采样频率高、瞬时精度高的优点,但是倾角传感器的性能受外部环境和温度变化的影响较大,经常会由于外部温度的变化引起传感器性能下降或产生不准确的倾角计算结果。
3、振动监测法是一种有效的风机安全监测方法,但其缺点也是存在的,主要包括以下几个方面:传感器成本高,振动传感器的价格相对较高,且需要经常更换,对成本构成一定的压力;监测数据处理复杂,振动传感器采集的数据比较多,处理起来较为繁琐,需要用计算机进行大量的数据处理。
4、声音监测法受环境影响大,声音监测法会受到环境噪声的影响,且环境噪声也可能掩盖真正的异常声音。监测数据难以分析,信号处理比较复杂,并且对于一些微小故障或频率较高的故障的监测精准度相对较低,需要和其它监测方法发生结合使用。
5、双天线北斗风机监测需要在风机机舱顶部安装双天线北斗设备,安装复杂,设备成本高,并且受基准站、监测站数据交换的限制,监测频率最高仅能达到1hz,对于高频振动无法监测。
6、由上可知,风机塔筒实时监测多为采用高精度的传感器进行数据采集,并且各自存在不足之处,同时还难以实现高精度的三维形变监测。而北斗系统能够实时监测三维形变,但是并不适用于高频监测领域。对于高频监测的需求,gnss与imu(惯性传感器)数据融合虽然能够得到高频结果,但需要两者进行姿态转换及数据融合,计算复杂,无法适用于现场解算。
7、综上所述,急需一种基于gnss和imu的风机轨迹高频监测方法以解决现有技术中存在的问题。
技术实现思路
1、本发明目的在于提供一种基于gnss和imu的风机轨迹高频监测方法,旨在解决现有对风机塔筒监测的方式无法实现高频监测的问题,具体技术方案如下:
2、一种基于gnss和imu的风机轨迹高频监测方法,包括以下步骤:
3、步骤s1、在风机附近的稳固区域安装基准站,在风机机舱顶部安装监测站;
4、步骤s2、获得风机塔筒初始中心点坐标和风机机舱的旋转半径并完成北方向寻找,将imu的初始方向与北方向对齐;
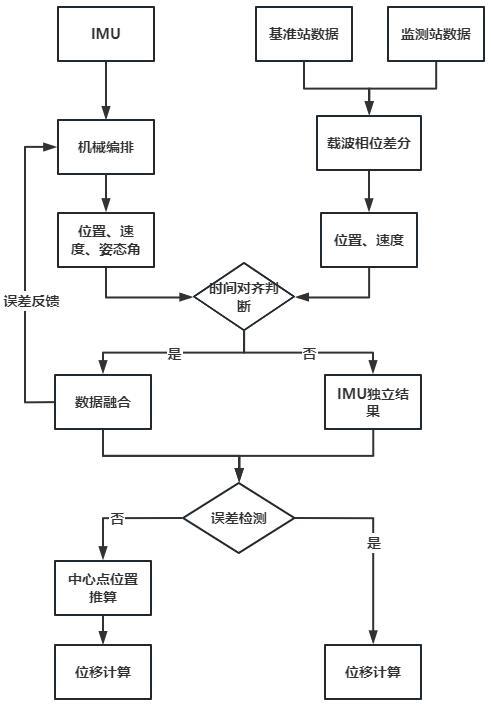
5、步骤s3、输出imu解算结果和gnss解算结果,将imu解算结果和gnss解算结果进行对比;若两者时间相等则对imu解算结果和gnss解算结果进行数据融合后执行下一步;若两者的时间不相等则单独输出imu解算结果,然后执行下一步;
6、步骤s4、判断是否在一条直线上,并计算在或不在一条直线情况下风机塔筒的位移量;其中,为风机塔筒初始中心,为第次测量时塔筒中心的实际位置,为第次测量时gnss的位置;
7、步骤s5、基于计算得到的风机塔筒的位移量进行风机模态分析。
8、以上技术方案中优选的:
9、设定阈值并根据公式(9)计算解算误差;当时,则认为在一条直线上;当,则认为不在一条直线上;
10、(9),
11、其中,为不在一条直线上时与的距离,为在一条直线上时与的距离。
12、以上技术方案中优选的,根据公式(7)计算:
13、(7),
14、根据公式(8)计算:
15、 (8),
16、其中,为风机塔筒初始中心与第次测量时gnss的位置之间的距离,为第次测量时gnss的位置与第次测量时塔筒中心的实际位置之间的距离,为与之间的夹角。
17、以上技术方案中优选的,风机塔筒初始中心点的坐标为,假设第次测量gnss输出坐标为,则根据公式(5)和公式(6)计算:
18、(5),
19、(6),
20、其中,为第次测量gnss到塔筒初始中心的方位角,为第次测量imu输出的方位角。
21、以上技术方案中优选的,当在一条直线上时,到的位移量与到的位移量相等,其中为第次测量时塔筒无形变理想状态下的gnss位置轨迹,按照极坐标公式得到理想状态下gnss绕中心点旋转的坐标:
22、(10),
23、其中,为理想状态下第次测量gnss位置,为风机机舱的旋转半径;
24、则风机塔筒的位移量根据公式(11)计算:
25、 (11),
26、当不在一条直线上时,根据公式(12)、(13)计算塔筒中心的实际位置坐标:
27、(12),
28、 (13),
29、其中,为imu输出的航向角、偏航角、俯仰角,为状态转移矩阵,为第次测量得到的塔筒中心实际位置,为塔筒初始中心到gnss接收机的杆臂矢量;
30、则风机塔筒的位移量根据公式(14)计算:
31、(14)。
32、以上技术方案中优选的,所述步骤s2中控制风机机舱完整旋转两周完成初始化;第一次旋转用于计算风机塔筒初始中心点坐标、风机机舱的旋转半径和imu校准;第二次旋转用于寻找北方向,并将imu的初始方向与北方向对齐。
33、以上技术方案中优选的,假设第一次旋转gnss得到个解算结果,将解算结果代入公式(1)中,按照最小二乘原理获得风机塔筒初始中心点坐标值以及风机机舱的旋转半径:
34、(1),
35、根据公式(2)获得风机塔筒初始中心点坐标值:
36、 (2),
37、其中,为第一次旋转的第个解算结果;
38、然后利用gnss输出的位置和速度信息对imu设备进行粗校准,然后利用卡尔曼滤波对imu设备进行精校准。
39、以上技术方案中优选的,假设第二次旋转gnss得到个解算结果;若存在,则第个解算结果对应北方向;否则选取的解算结果按照公式(3)计算,选取最小对应的解算结果为北方向:
40、(3),
41、其中,为风机与北方向的夹角,为第二次旋转的第个解算结果。
42、以上技术方案中优选的,根据公式(4)计算塔筒初始中心点到gnss接收机的杆臂矢量:
43、(4),
44、其中,为塔筒初始中心到gnss接收机的杆臂矢量。
45、以上技术方案中优选的,所述步骤s3中,将imu输出的加速度、角加速度数据进行机械编排得到imu解算结果,所述imu解算结果包括imu的位置、imu的速度、imu的方位角信息;
46、将基准站和监测站的gnss数据进行载波相位差分解算得到gnss解算结果,所述gnss解算结果包括gnss位置和gnss速度;
47、采用卡尔曼滤波进行数据融合之后,将误差反馈至机械编排中,进行imu误差改正。
48、应用本发明的技术方案,具有以下有益效果:
49、(1)本发明将gnss和imu结合进行风机安全监测,无需使用双天线北斗接收机,节约成本,克服了传统监测设备无法监测三维坐标的缺陷。
50、(2)用imu输出的方位角判断风机塔筒初始中心、风机塔筒实时中心与gnss接收机的关系,将角度误差转换为位移误差量;采用imu输出的方位角信息进行风机位移情况判断,若在一条直线上则可直接计算风机中心点位移,这种情况下imu的姿态角仅用于姿态判断,并不直接参与位移解算,减少误差积累;若不在一条直线上,采用简单方法进行位移计算,无需利用状态转移矩阵进行复杂运算,减少运算量,更适合高频解算。
51、(3)使用单天线gnss设备与imu设备结合即可进行风机位移监测,设备安装简便,节省成本。
52、(4)依托于imu的高频特性,能够以imu的频率输出三维信息,并在gnss解算结果和imu解算结果数据融合后,对imu进行误差改正,抑制imu误差发散,能够监测风机的高频振动数据。
53、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
- 还没有人留言评论。精彩留言会获得点赞!