一种非平行轨迹分布式星载SAR空间同步方法
本发明属于合成孔径雷达,尤其涉及一种非平行轨迹分布式星载sar空间同步方法。
背景技术:
1、分布式星载合成孔径雷达(sar)利用双/多星形成近距离编队,以同时/近同时获取场景的多幅图像,实现对场景的单航过干涉测高功能。由于各卫星同时/近同时观测同一个场景,各星获得的图像之间的场景去相关可忽略不计,因此分布式星载sar可获得精度远优于重轨星载sar的地面数字高程模型(dem)。由于上述优势,分布式星载sar成为近年来国内外的研究热点。
2、分布式星载sar由于收发卫星分置,需解决时间、频率和空间同步问题。其中,空间同步指的是通过实时有效地控制发射和接收平台的天线指向,使得发射和接收波束同时、精确地指向地面同一个目标,以尽可能提高系统产品的性能(如干涉测高精度等)。
3、目前,在已有的分布式星载sar(tandem-x、陆探一号等)中,采用的空间同步方法都是使主星和从星都独立、正侧视地指向场景,使图像具有相同的多普勒中心。与主从星共同指向场景中心的方式相比,这种空间同步方法尽管会略微降低辅图像的信噪比,但是能够保证主辅图像具有相同的多普勒中心,从而具有最高的多普勒相关性。
4、然而,上述已有分布式星载sar空间同步方法都是基于主从星具有平行轨迹的假设前提下。当卫星之间的轨迹不平行时,即使令各主辅图像多普勒中心相同,也无法保证主辅图像的多普勒相关性最高。对于分布式星载sar而言,图像几何相关性是决定高程反演的首要因素,因此,迫切需要突破不平行轨迹下的分布式星载sar空间同步方法,以提高单航过测高的精度。这在现有的分布式星载sar空间同步技术中未有提及。
技术实现思路
1、为解决上述问题,本发明提供一种非平行轨迹分布式星载sar空间同步方法,该空间同步方法可结合主从星的速度和观测场景精确计算主星孔径中心时间、主星天线方位角和俯仰角、从星天线方位角和俯仰角,完成空间同步,提高主辅图像的相关性。
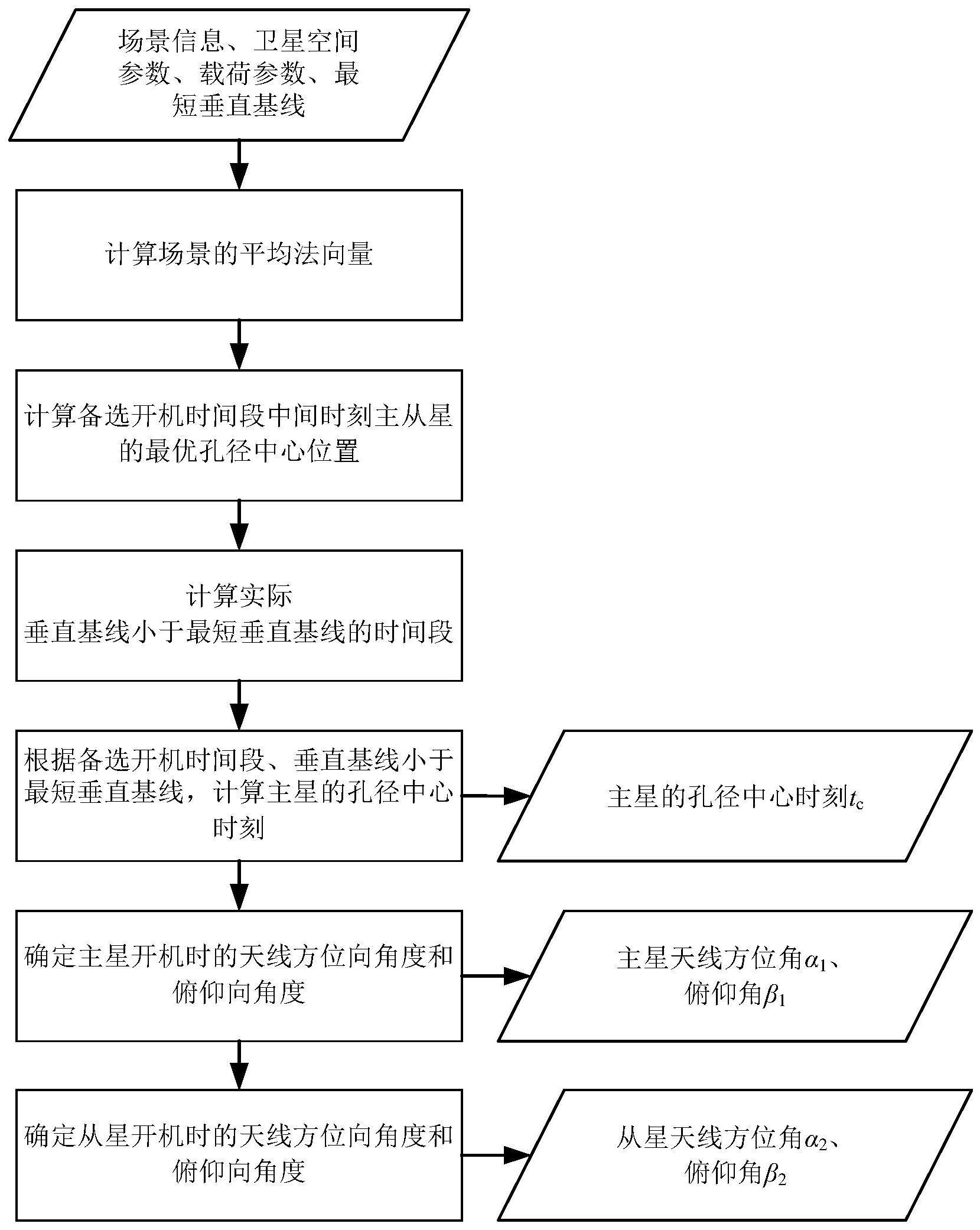
2、本发明的非平行轨迹分布式星载sar空间同步方法包括:
3、s1、获取卫星的空间参数,包括主星的可开机时间段ω=[tbeg,tend]、ω时间内地心固定(ecf)坐标系下主星的平均速度v1、从星的平均速度v2、主星的起始位置s1,0、从星的起始位置s2,0,以及地心惯性坐标系(eci)坐标系下主星的平均速度v1,eci、从星的平均速度v2,eci、主星的起始位置s1,0,eci、从星的起始位置s2,0,eci;获取待成像场景信息,包括可开机时间段中间时刻eci和ecf坐标系下场景中心的坐标peci和p、场景的dem、tbeg时刻场景中心在eci坐标系下由地球自转引起的瞬时运动速度vp;获取卫星的载荷参数,包括波长λ、带宽b、合成孔径时间ts;获取干涉所需的最短垂直基线bmin。
4、s2、分别计算可开机时间段中间时刻,eci和ecf坐标系下场景的平均法向量neci和n。在eci坐标系下,根据场景dem构建场景中各点的三维坐标,形成三维曲面并得到各个网格内曲面的法线。对所有法线方向取均值并归一化,得到场景的平均法向量neci;类似地,在ecf坐标系下执行此操作,得到n。
5、s3、计算可开机时间段中间时刻主从星的最优孔径中心位置s1,c、s2,c,具体步骤包括:
6、s31、计算可开机时间段中间时刻,计算方式为t1,c=(tbeg+tend)/2;进一步,获得此时主星的位置,计算方式为s1,c=s1,0+v1·(t1,c-tbeg)。
7、s32、计算地面等距离方向ug⊥。首先计算视线方向矢量,计算方式为u=(s1,c-p)/||s1,c-p||;然后地距方向ug,计算方式为ug=pgu,其中pg=i-nnt表示以n为法向量的投影矩阵,i为单位矩阵,上标t表示转置操作;进一步,根据下式计算地面等距离方向
8、ug⊥=ug×n/||ug×n|| (1)
9、其中×为向量的叉乘运算。
10、s33、计算与可开机时间段中间时刻相应的最优从星孔径中心时刻t2,c,计算方式为
11、
12、其中p=i-uut表示以视线方向矢量为法向量的投影矩阵。
13、s34、计算开可开机时间段中间时刻从星的最优孔径中心位置s2,c,计算方式为
14、s2,c=s2,0+v2·(t2,c-tbeg) (3)
15、s4、计算实际垂直基线小于最短垂直基线bmin的时间段φ=[t1+t1,c,t2+t1,c],具体步骤包括:
16、s41、计算开机时间段中任意时刻t对应的主从星星间垂直基线,计算方式为
17、
18、其中表示高程方向。δsc=s1,c-s2,c表示t1,c时刻的星间基线,δv=v1-v2表示主从星速度偏差。
19、s42、求解方程b⊥≤bmin,得到时间段φ=[t1+t1,c,t2+t1,c],其中
20、
21、s5、根据可开机时间段、垂直基线小于最短垂直基线的时间段,计算主星的孔径中心时刻tc,计算方式为
22、
23、其中ω-φ表示集合ω与φ的差集。
24、s6、确定主星开机时的天线方位向角度α1和俯仰向角度β1,具体步骤包括:
25、s61、计算eci坐标下,孔径中心时刻主从星的位置和场景中心的位置,计算方式为
26、
27、s62、根据主星孔径中心时刻位置计算主星参考水平面的法向量n1,计算方式为
28、
29、参考水平面指的是包含速度所在的平面,并且与地心到卫星连线s1,cen,eci尽可能垂直的平面。
30、s63、确定主星开机时的天线方位向角度α1和俯仰向角度β1,计算方式为
31、
32、s7、确定从星开机时的天线方位向角度α2和俯仰向角度β2,具体步骤包括:
33、s71、计算辅图像获取时候主从星最优孔径中心时刻t,计算方式为
34、
35、s72、确定t时刻主星的波足中心peci,1坐标,计算方式为
36、
37、其中s1,bi,eci=s1,0,eci+v1,eci·(t-tbeg)为t时刻主星的位置。
38、s73、根据从星孔径中心时刻位置计算从星参考水平面的法向量n2,计算方式为
39、
40、其中s2,bi,eci=s2,0,eci+v2,eci·(t-tbeg)为t时刻从星的位置。
41、s74、确定从星开机时的天线方位向角度α2和俯仰向角度β2,计算方式为
42、
43、其中peci,2为t时刻从星波束中心的位置,计算方式为peci,2=2pcen,eci-peci,1。
44、本发明的有益效果在于:
45、本发明可结合主从星的速度和观测场景,精确计算使图像几何相关性最优的主星孔径中心时间、主星天线方位角和俯仰角、从星天线方位角和俯仰角,完成空间同步,提高主辅图像的相关性。
- 还没有人留言评论。精彩留言会获得点赞!