一种增加3D霍尔测量位移距离的方法及其装置与流程
本发明属于传感器位移测量,尤其涉及一种增加3d霍尔测量位移距离的方法及其装置。
背景技术:
1、随着霍尔技术不断发展,用3d霍尔测量角度和位移的芯片越来越多,它具用高分辨率,高精度,高线性度,具有多种输出方式,实时性强,可靠性好,性价比高等优点。在汽车,工程机械,工业产品中广泛应用。
2、3d霍尔利用磁钢移动,产生2个磁场矢量方向变化,从而达到测量位移变化量输出。但由于霍尔测量磁场强度的限制和磁钢2个矢量磁场变化必须连续变化,所以芯片供应商推荐的测量位移小于40mm。
3、传统霍尔感应测量位移的传感器可以检测的位移量不超过40mm,且精度均在1.5%~3%之间。有两种方式可以增加检测的位移量:1.单颗霍尔最长检测距离为40mm,按整列方式增加霍尔数量,从而达到检测距离的加长;2.将检测物磁铁的尺寸加长,从而增加位移量。以上的两种方式都有弊端。第1种:在目前传感器行业的压力下,要求传感器的尺寸是越来越小,通过增加霍尔数量一定是会增大传感器的尺寸;第2种:被测物体磁铁的尺寸增加,但相同的磁场也会增强,按照霍尔效应的原理磁场强度过大,霍尔能感受到的磁场变化强度有限,会使霍尔芯片误判检测的位移距离会非常不准确,参考图3,图3证明2个磁场矢量其中一个在中间是不变化的,所以用增加磁钢长度无法增加测量位移。
4、目前,若想实现检测长位移的目的,通常采用磁组整列式的方法,即方法1和方法2相结合,但这样的方式,使安装传感器的空间需求较大,占用了大量空间,使得产品的体型臃肿,且由于使用整列式的磁组,无疑增加了制造成本。
技术实现思路
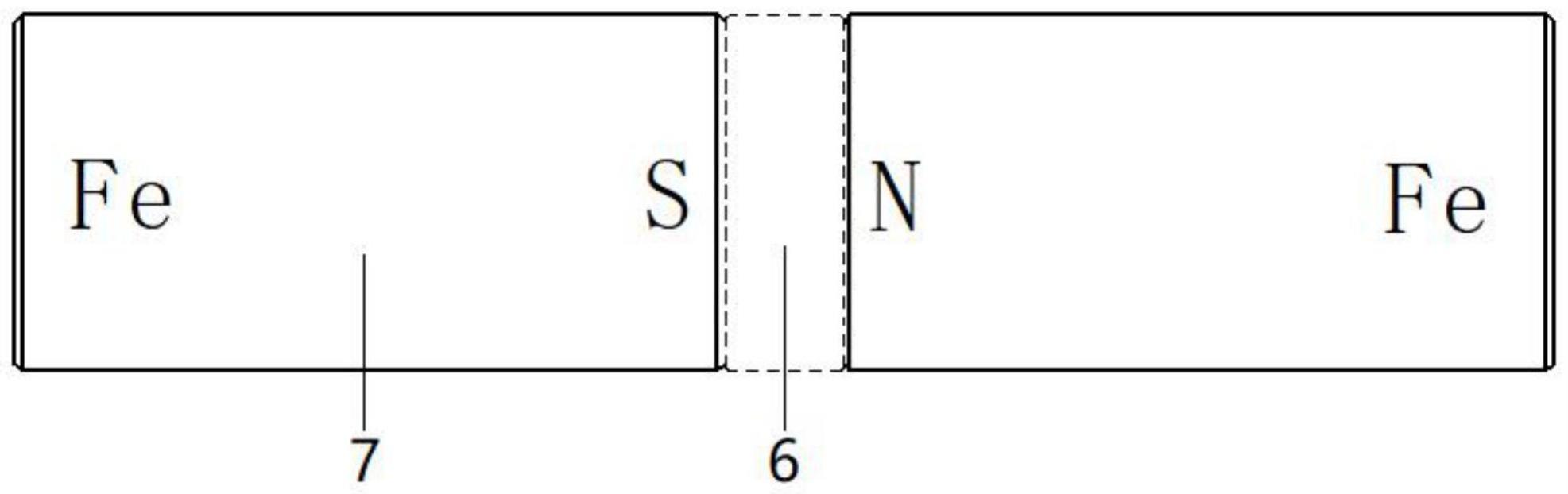
1、本发明的目的在于提供一种增加3d霍尔测量位移距离的方法,其特征在于,通过增加磁钢的磁场范围,从而增加霍尔检测磁钢的检测距离,具体包括磁钢和乘磁物体铁,乘磁物体铁的数量为两块,两块乘磁物体铁分别磁吸附在磁钢的两极。
2、进一步地,3d霍尔测量位移距离的测量精度在1%以内。
3、一种用于3d霍尔测量位移的装置,其特征在于,包括工装底座、步进电机、传感器组件、磁钢组件、滑轨、光电开关、驱动器和上位机;
4、步进电机和滑轨皆固定于工装底座上方,步进电机的输出轴传动连接有丝杆,丝杆通过其两端的固定架固定在滑轨的正上方;
5、光电开关固定于滑轨上,且光电开关和驱动器线路连接,驱动器连接有电源并与上位机信号连接;
6、传感器组件架设于丝杆上方;
7、磁钢组件的底部滑动设于滑轨上,且磁钢组件与丝杆螺纹连接,通过步进电机和滑轨相互配合实现磁钢组件于传感器下方往复位移。
8、进一步地,磁钢组件包括磁钢件、磁钢件固定件和磁钢件滑轨固定件,磁钢件包括磁钢和分别吸附在磁钢两极的两个乘磁物体铁;磁钢件固定于磁钢件固定件内,磁钢件固定件固定于磁钢件滑轨固定件上方,磁钢件滑轨固定件的底部与回归滑动连接。
9、进一步地,传感器组件包括传感器固定框架和传感器,传感器固定框架包括两条框架腿和连接两条框架腿顶部的固定板,两条框架腿的底部皆固定于工装底座上,且分别位于丝杆的相对两侧,传感器固定于固定板的上方,并通过两条框架腿架设于丝杆的上方。
10、进一步地,磁钢和乘磁物体铁的长度由传感器和被测物体之间的气隙决定。
11、进一步地,气隙为8.6mm时,磁钢的长度为5mm,乘磁物体铁的长度为30mm。
12、与现有技术相比,本发明的有益效果主要体现在:
13、1、本发明通过采用增加磁钢的磁场范围,从而增加霍尔检测磁钢的检测距离,此方法应用于汽车,工程机械,工业产品中,和磁组整列式相比,减小了传感器的尺寸,进而降低了整体的大小,且降低了制作成本。
14、2、本发明使用方法通过磁路仿真可以证明,测量精度在1%以内。
技术特征:
1.一种增加3d霍尔测量位移距离的方法,其特征在于,通过增加磁钢的磁场范围,从而增加霍尔检测磁钢的检测距离,具体包括磁钢和乘磁物体铁,所述乘磁物体铁的数量为两块,两块所述乘磁物体铁分别磁吸附在所述磁钢的两极。
2.根据权利要求1所述的增加3d霍尔测量位移距离的方法,其特征在于,所述3d霍尔测量位移距离的测量精度在1%以内。
3.一种用于3d霍尔测量位移的装置,用于试验如权利要求1所述的增加3d霍尔测量位移距离的方法,其特征在于,包括工装底座、步进电机、传感器组件、磁钢组件、滑轨、光电开关、驱动器和上位机;
4.根据权利要求3所述的用于3d霍尔测量位移的装置,其特征在于,所述磁钢组件包括磁钢件、磁钢件固定件和磁钢件滑轨固定件,所述磁钢件包括磁钢和分别吸附在所述磁钢两极的两个乘磁物体铁;所述磁钢件固定于所述磁钢件固定件内,所述磁钢件固定件固定于所述磁钢件滑轨固定件上方,所述磁钢件滑轨固定件的底部与所述滑轨滑动连接。
5.根据权利要求4所述的用于3d霍尔测量位移的装置,其特征在于,所述传感器组件包括传感器固定框架和传感器,所述传感器固定框架包括两条框架腿和连接两条所述框架腿顶部的固定板,两条所述框架腿的底部皆固定于所述工装底座上,且分别位于所述丝杆的相对两侧,所述传感器固定于所述固定板的上方,并通过两条所述框架退架设于所述丝杆的上方。
6.根据权利要求5所述的用于3d霍尔测量位移的装置,其特征在于,所述磁钢和乘磁物体铁的长度由传感器和被测物体之间的气隙决定。
7.根据权利要求6所述的用于3d霍尔测量位移的装置,其特征在于,当所述气隙为8.6mm时,所述磁钢的长度为5mm,所述乘磁物体铁的长度为30mm。
技术总结
本发明提供一种增加3D霍尔测量位移距离的方法及其装置,属于传感器位移测量技术领域,通过将磁钢的两极吸附有乘磁物体铁,两块乘磁物体铁增加了磁钢的磁场范围,进而增加霍尔检测磁钢的检测距离,测量装置包括工装底座和其上表面的步进电机和滑轨,设于滑轨上的磁钢组件和光电开关,部件电机传动连接有丝杆,丝杆螺纹连接有磁钢组件,磁钢组件底部与滑轨滑动连接,丝杆的上方,架设有传感器组件。通过驱动步进电机旋转丝杆配合滑轨,实现磁钢组件在传感器的下方进行往复位移。本发明通过增加霍尔检测磁钢的检测距离,和磁组整列式相比,减小了传感器的占用空间,进而降低了整体的大小,降低了制作成本。
技术研发人员:李光荣,杨佳伟,朱力滨,喻小帅,刘正伟
受保护的技术使用者:嘉默传感技术(上海)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!