用于北斗PPP-RTK/MEMS的完好性监测方法
本发明属于卫星导航,具体涉及到一种用于北斗ppp-rtk/mems导航系统的完好性监测方法。
背景技术:
1、2020年国家提出建设北斗综合pnt体系的宏伟目标,将北斗卫星导航系统(beidounavigation satellite system,bds)作为国家基础设施,根据不同的应用场景下的用户需求,通过不同的应用技术全天候为广大用户提供适配需求的导航定位服务。在自动驾驶、无人农场和海洋牧场等诸多安全关键应用领域中,卫星导航系统面临着信号遮挡、非视距误差、多径效应、射频威胁等多重误差源影响,难以独立满足应用场景所需导航性能。
2、为了满足上述应用场景所需要的导航性能,人们研究高精度的ppp-rtk定位与低成本的mems(micro-electro-mechanical system,微机电系统)惯性定位的组合模式作为上述应用场景的导航定位方案。其中ppp-rtk是近年来发展火热的一种定位技术,其结合了ppp(precise point position,精密单点定位技术)的覆盖范围广以及rtk(real timekinematic,实时动态差分定位技术)的收敛时间快等特点,能为服务区域内的用户提供高精度、快收敛的导航定位服务。ppp-rtk/mems组合模式可接收服务云端信息,有着覆盖范围大、收敛速度快和亚米级精度的优势,可有效弥补单卫星导航系统在应用场景、连续性等方面的不足,受到业界的广泛关注。
3、然而,异构系统之间的组合意味着故障发生频次提升,且引入传感器融合不匹配的潜在风险,严重制约导航定位服务的可靠性。同时,在城市峡谷、海洋牧场、无人农场等复杂环境下,北斗ppp-rtk/mems组合导航系统存在着多种故障模式混合的特殊风险,面临阶跃故障和缓变故障难以同时监测的威胁。此外,在与生命财产安全高度相关的应用场景下,用户除对导航定位的高精度需求外,对导航信息的完好性需求也日益增长。现有的传统gnss/ins组合导航系统的完好性监测方案难以适配。
4、因此,需要开发针对ppp-rtk/mems组合导航定位模式的完好性监测方法,保障组合导航定位结果的完好性,可有效拓展卫星导航系统应用领域。
技术实现思路
1、为解决上述问题,本发明提供了一种用于北斗ppp-rtk/mems组合导航系统的完好性监测方法,该方法包括:
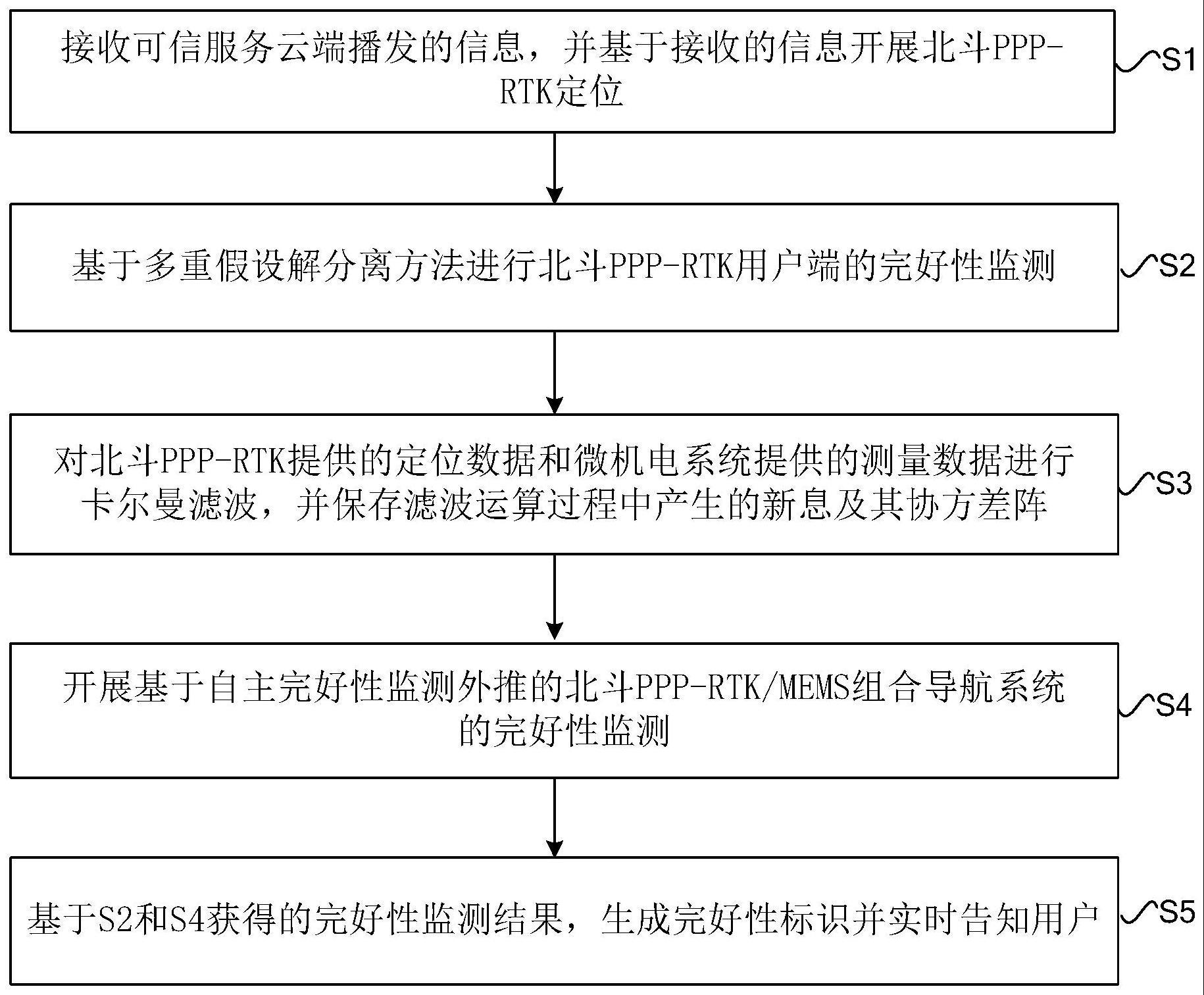
2、s1)接收可信服务云端播发的信息,并基于接收的信息开展北斗ppp-rtk定位;
3、s2)基于多重假设解分离方法进行北斗ppp-rtk用户端的完好性监测;
4、s3)对北斗ppp-rtk提供的定位数据和微机电系统提供的测量数据进行卡尔曼滤波,并保存滤波运算过程中产生的新息及其协方差阵;
5、s4)开展基于自主完好性监测外推的北斗ppp-rtk/mems组合导航系统的完好性监测;
6、s5)基于步骤s2和s4获得的完好性监测结果,生成完好性标识并实时告知用户。
7、本发明的有益效果在于:
8、针对在城市交通、城市峡谷、无人农场和海洋牧场等复杂场景,在北斗ppp-rtk和mems组合导航系统参与的导航定位场景中,本发明提出的完好性监测方法,基于多重假设解分离(multiple hypothesis solution separation,mhss)和自主完好性监测外推(autonomous integrity monitoring extrapolation,aime),分别在北斗ppp-rtk定位层面和组合定位层面进行完好性监测,该双重监测方法利用卫星导航增强系统作为可信服务云端,用户端接收可信服务云端播发的相关信息进行完好性监测,解决了大气改正产品和卫星钟轨改正产品中断导致的北斗卫星导航系统定位服务降级情况下完好性监测困难这一技术问题,以及异构传感器融合不匹配导致的导航定位信息失效的技术问题,保障用户终端导航定位结果的可靠性和完好性,具有重要意义。
技术特征:
1.一种用于北斗ppp-rtk/mems的完好性监测方法,其特征在于,包括:
2.如权利要求1所述的完好性监测方法,其特征在于,在步骤s1中,所述接收可信服务云端播发的信息包括但不限于:区域大气改正产品、产品质量标识、保守误差模型及相关参数、和风险源先验故障概率,其中所述区域大气改正产品和所述保守误差模型用于开展北斗ppp-rtk定位,所述风险源先验故障概率用于为不同故障分配误警率指标,是北斗ppp-rtk用户端的完好性监测的必要输入信息。
3.如权利要求2所述的完好性监测方法,其特征在于,在步骤s2中,首先,提前设定需要监测的风险源,并接收可信服务云端播发的对应先验故障,根据风险源构造全视子集和故障子集,计算出检测统计量;接着,根据所接收的先验故障概率分配的误警率和滤波过程的状态误差协方差矩阵,计算出各故障子集解的分离标准差和故障检测阈值,最后,计算出保护水平,在东北天中某个方向q的保护水平未超过给定的告警限值的情况下,若在东北天该方向q的检测统计量大于故障检测阈值,则认为北斗ppp-rtk的定位结果不可信,需要在告警时限内告警,排除故障子集所对应的故障,并重复步骤s2,直至所有的检测结果为无故障存在,进入步骤s3;若无法排除故障,则进入步骤s5;反之,若在东北天该方向q的检测统计量小于等于故障检测阈值,则认为无故障存在,北斗ppp-rtk的定位结果可信,进入步骤s3。
4.如权利要求1所述的完好性监测方法,其特征在于,在步骤s3中,所述进行卡尔曼滤波的卡尔曼滤波方程如下:
5.如权利要求2所述的完好性监测方法,其特征在于,在步骤s4中,利用步骤s3产生的新息计算出检测统计量,基于为不同故障分配的误警率计算出故障检测阈值,利用新息的协方差阵和滤波增益矩阵计算水平保护水平和垂直保护水平,当水平保护水平和垂直保护水平分别小于给定的告警限值时,此时如果所述检测统计量大于故障检测阈值,则认为微机电系统存在故障,在告警时限内向用户告警,并排除故障重构定位系统,进入步骤s5;反之,如果所述检测统计量小于等于故障检测阈值,则认为微机电系统不存在故障,进入步骤s5。
6.如权利要求1所述的完好性监测方法,其特征在于,在步骤s5中,对经由步骤s2和s4分别获得的完好性监测结果进行处理,导航系统生成完好性标识,向用户实时反馈当前导航服务的可信状态。
技术总结
本发明涉及一种用于北斗PPP‑RTK/MEMS的完好性监测方法,包括:接收可信服务云端播发的信息,并基于接收的信息开展北斗PPP‑RTK定位;基于多重假设解分离方法进行北斗PPP‑RTK用户端的完好性监测;对北斗PPP‑RTK提供的定位数据和微机电系统提供的测量数据进行卡尔曼滤波,并保存滤波运算过程中产生的新息及其协方差阵;开展基于自主完好性监测外推的北斗PPP‑RTK/MEMS组合导航系统的完好性监测;基于获得的完好性监测结果,生成完好性标识并实时告知用户。
技术研发人员:赵琳,叶祺玮,张洁,杨福鑫,程建华,李慧
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!