基于风廓线雷达数据的风场垂直精细结构获取方法和装置与流程
本申请涉及环境数据质控,特别是涉及一种基于风廓线雷达数据的风场垂直精细结构获取方法和装置。
背景技术:
1、随着雷达技术的发展,各种类型的雷达更多地被应用在大气环境监测领域。风廓线雷达是一种新型的多普勒测风雷达,主要以晴空大气作为探测对象。与常规大气探测相比,风廓线雷达具有连续无人值守、可全天候监测大气风场、可连续探测以及高精度和高运行可靠性等优点。但是在实际探测过程中,风廓线雷达往往受到地物杂波、降水、无线电信号等各种非气象因素的干扰,从而影响了其观测数据的准确性。
2、风场垂直精细结构对云和对流的发展、演变有重要作用,而风廓线雷达观测数据可以用于对风场垂直精细结构的检测,因此风廓线雷达观测数据的不准确性,会对风场垂直精细结构的检测造成影响。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高风廓线雷达数据质量,从而得到更精确的风场垂直精细结构的基于风廓线雷达数据的风场垂直精细结构获取方法和装置。
2、第一方面,本申请提供了一种基于风廓线雷达数据的风场垂直精细结构获取方法,所述方法包括:
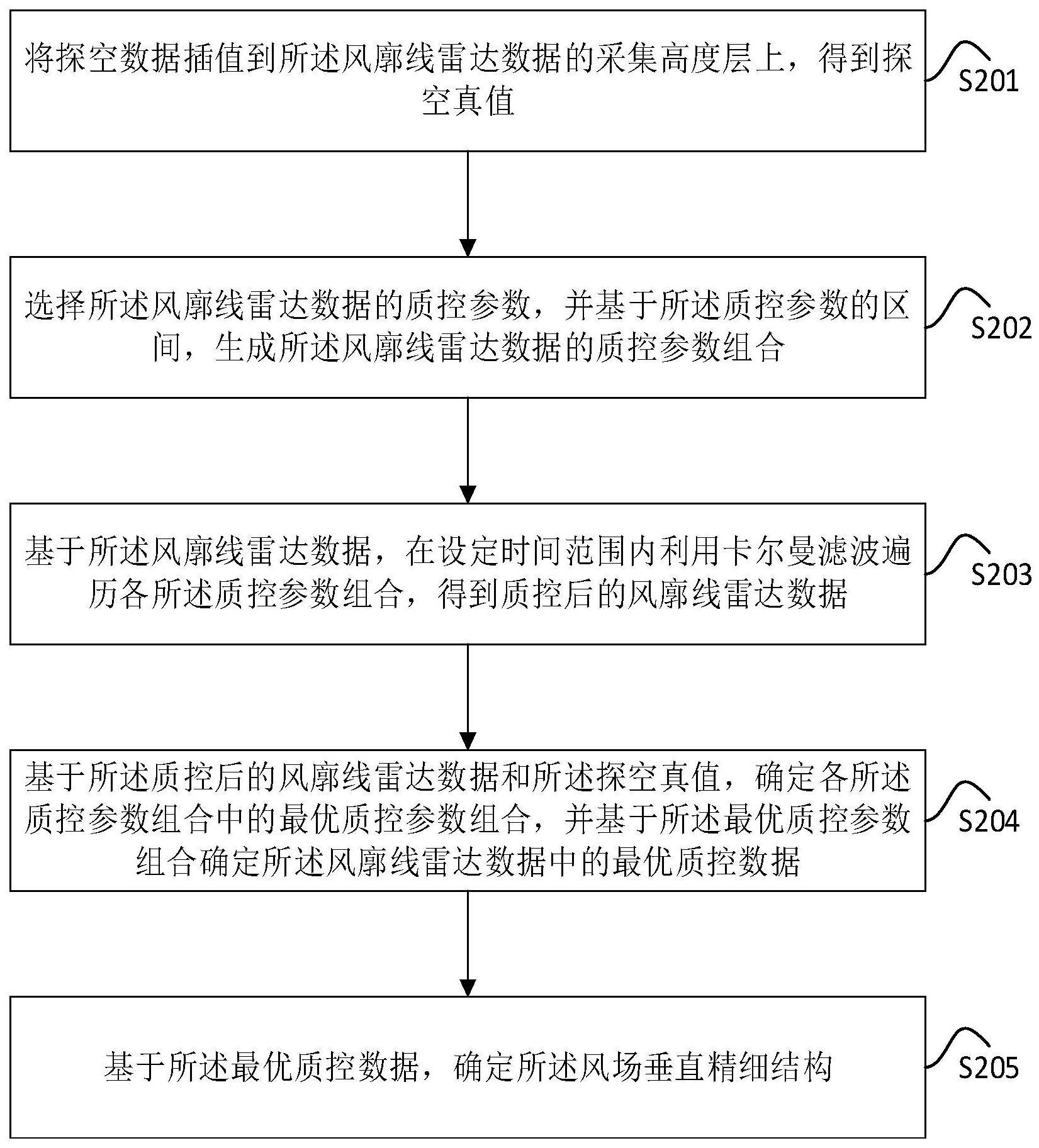
3、将探空数据插值到所述风廓线雷达数据的采集高度层上,得到探空真值,所述探空真值与所述风廓线雷达数据的采集高度相同;
4、选择所述风廓线雷达数据的质控参数,并基于所述质控参数的区间,生成所述风廓线雷达数据的质控参数组合;
5、基于所述风廓线雷达数据,在设定时间范围内利用卡尔曼滤波遍历各所述质控参数组合,得到质控后的风廓线雷达数据
6、基于所述质控后的风廓线雷达数据和所述探空真值,确定各所述质控参数组合中的最优质控参数组合,并基于所述最优质控参数组合确定所述风廓线雷达数据中的最优质控数据;
7、基于所述最优质控数据,确定所述风场垂直精细结构。
8、在其中一个实施例中,所述选择所述风廓线雷达数据的质控参数,并基于所述质控参数的区间,生成所述风廓线雷达数据的质控参数组合包括:
9、基于所述风廓线雷达数据的历史数据,选择所述风廓线雷达数据的质控参数,确定所述质控参数的区间,所述质控参数包括观测方差、初始估计方差以及过程噪声;
10、基于所述观测方差的第一数据区间、所述初始估计方差的第二数据区间以及所述过程噪声的第三数据区间,生成所述风廓线雷达数据的质控参数组合。
11、在其中一个实施例中,所述基于所述风廓线雷达数据,在设定时间范围内利用卡尔曼滤波遍历各所述质控参数组合,得到质控后的风廓线雷达数据包括:
12、基于所述风廓线雷达数据的采集高度层,对设定时间范围内的所述风廓线雷达数据进行排序,得到排序后的所述风廓线雷达数据;
13、利用卡尔曼滤波,将所述排序后的风廓线雷达数据遍历各所述质控参数组合,得到质控后的所述风廓线雷达数据。
14、在其中一个实施例中,所述利用卡尔曼滤波,将所述排序后的风廓线雷达数据遍历各所述质控参数组合,得到质控后的所述风廓线雷达数据包括:
15、利用以下公式将所述排序后的风廓线雷达数据遍历各所述质控参数组合,得到所述质控后的风廓线雷达数据:
16、
17、其中,所述为利用所述质控参数组合进行卡尔曼滤波得到的当前时次所述质控后风廓线雷达数据,所述为利用所述质控参数组合进行卡尔曼滤波得到的前一时次所述质控后的风廓线雷达数据,所述rn为所述风廓线雷达数据的观测方差,所述zn为当前时次质控前的所述风廓线雷达数据,所述pn,n-1为前一时次对当前时次的所述质控后的风廓线雷达数据的更新估计方差;
18、所述更新估计方差为所述风廓线雷达数据的初始估计方差在卡尔曼滤波过程中的更新值,所述更新估计方差的公式为:
19、
20、所述q为所述风廓线雷达数据的过程噪声。
21、在其中一个实施例中,所述基于所述质控后的风廓线雷达数据和所述探空真值,确定各所述质控参数组合中的最优质控参数组合包括:
22、基于所述探空真值,计算所述质控后的风廓线雷达数据与所述探空真值的均方根误差;
23、基于所述均方根误差中的最小值,确定各所述质控参数组合中的最优质控参数组合。
24、在其中一个实施例中,所述将探空数据插值到所述风廓线雷达数据的采集高度上,得到探空真值包括:
25、基于所述风廓线雷达数据的采集高度层,将所述探空数据的纬向风分量和径向风分量,插值到所述采集高度层上,得到所述探空真值。
26、第二方面,本申请还提供了一种基于风廓线雷达数据的风场垂直精细结构获取装置,所述装置包括:
27、探空数据插值模块,用于将探空数据插值到所述风廓线雷达数据的采集高度层上,得到探空真值,所述探空真值与所述风廓线雷达数据的采集高度相同;
28、质控组合生成模块,用于选择所述风廓线雷达数据的质控参数,并基于所述质控参数的区间,生成所述风廓线雷达数据的质控参数组合;
29、质控组合遍历模块,用于基于所述风廓线雷达数据,在设定时间范围内利用卡尔曼滤波遍历各所述质控参数组合,得到质控后的风廓线雷达数据;
30、最优数据确定模块,用于基于所述质控后的风廓线雷达数据和所述探空真值,确定各所述质控参数组合中的最优质控参数组合,并基于所述最优质控参数组合确定所述风廓线雷达数据中的最优质控数据;
31、风场结构确定模块,用于基于所述最优质控数据,确定所述风场垂直精细结构。
32、第三方面,本申请还提供了一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面的内容。
33、第四方面,本申请还提供了一种计算机可读存储介质,所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面的内容。
34、第五方面,本申请还提供了一种计算机程序产品,所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面的内容。
35、上述基于风廓线雷达数据的风场垂直精细结构获取方法和装置,通过将探空数据插值到所述风廓线雷达数据的采集高度层上,得到探空真值,所述探空真值与所述风廓线雷达数据的采集高度相同;选择所述风廓线雷达数据的质控参数,并基于所述质控参数的区间,生成所述风廓线雷达数据的质控参数组合;基于所述风廓线雷达数据,在设定时间范围内利用卡尔曼滤波遍历各所述质控参数组合,得到质控后的风廓线雷达数据;基于所述质控后的风廓线雷达数据和所述探空真值,确定各所述质控参数组合中的最优质控参数组合,并基于所述最优质控参数组合确定所述风廓线雷达数据中的最优质控数据;基于所述最优质控数据,确定所述风场垂直精细结构,解决了由于风廓线雷达的原始数据不准确导致无法精确获取风场垂直精细结构的问题,提高了风廓线雷达的数据质控质量和风场垂直精细结构的精度。
技术特征:
1.一种基于风廓线雷达数据的风场垂直精细结构获取方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于风廓线雷达数据的风场垂直精细结构获取方法,其特征在于,所述获取所述风廓线雷达数据的质控参数,并基于所述质控参数的区间,生成所述风廓线雷达数据的质控参数组合包括:
3.根据权利要求1所述的基于风廓线雷达数据的风场垂直精细结构获取方法,其特征在于,所述基于所述风廓线雷达数据,在设定时间范围内利用卡尔曼滤波遍历各所述质控参数组合,得到质控后的风廓线雷达数据包括:
4.根据权利要求3所述的基于风廓线雷达数据的风场垂直精细结构获取方法,其特征在于,所述利用卡尔曼滤波,将所述排序后的所述风廓线雷达数据遍历各所述质控参数组合,得到质控后的风廓线雷达数据包括:
5.根据权利要求1所述的基于风廓线雷达数据的风场垂直精细结构获取方法,其特征在于,所述基于所述质控后的风廓线雷达数据和所述探空真值,确定各所述质控参数组合中的最优质控参数组合包括:
6.根据权利要求1所述的基于风廓线雷达数据的风场垂直精细结构获取方法,其特征在于,所述将探空数据插值到所述风廓线雷达数据的采集高度上,得到探空真值包括:
7.一种基于风廓线雷达数据的风场垂直精细结构获取装置,其特征在于,所述装置包括:
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本申请涉及一种基于风廓线雷达数据的风场垂直精细结构获取方法和装置,所述方法包括:将探空数据插值到风廓线雷达数据的采集高度层上,得到探空真值;选择风廓线雷达数据的质控参数,并基于质控参数的区间,生成多个质控参数组合;在设定时间范围内基于风廓线雷达数据利用卡尔曼滤波遍历各质控参数组合,得到质控后的风廓线雷达数据;基于质控后的风廓线雷达数据和探空真值,获取各质控参数组合中的最优质控参数组合,确定风廓线雷达数据中的最优质控数据,从而确定风场垂直精细结构,采用本方法解决了由于风廓线雷达的原始数据不准确导致无法精确获取风场垂直精细结构的问题,提高了风廓线雷达的数据质控质量和风场垂直精细结构的精度。
技术研发人员:黄龄,白兰强,刘春霞,毕雪岩,朱宇,周明森,温冠环
受保护的技术使用者:中国气象局广州热带海洋气象研究所(广东省气象科学研究所)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!