一维俯仰相扫防撞雷达增益自动控制设计方法与流程
本发明属于雷达系统的,尤其涉及一种一维俯仰相扫防撞雷达增益自动控制设计方法。
背景技术:
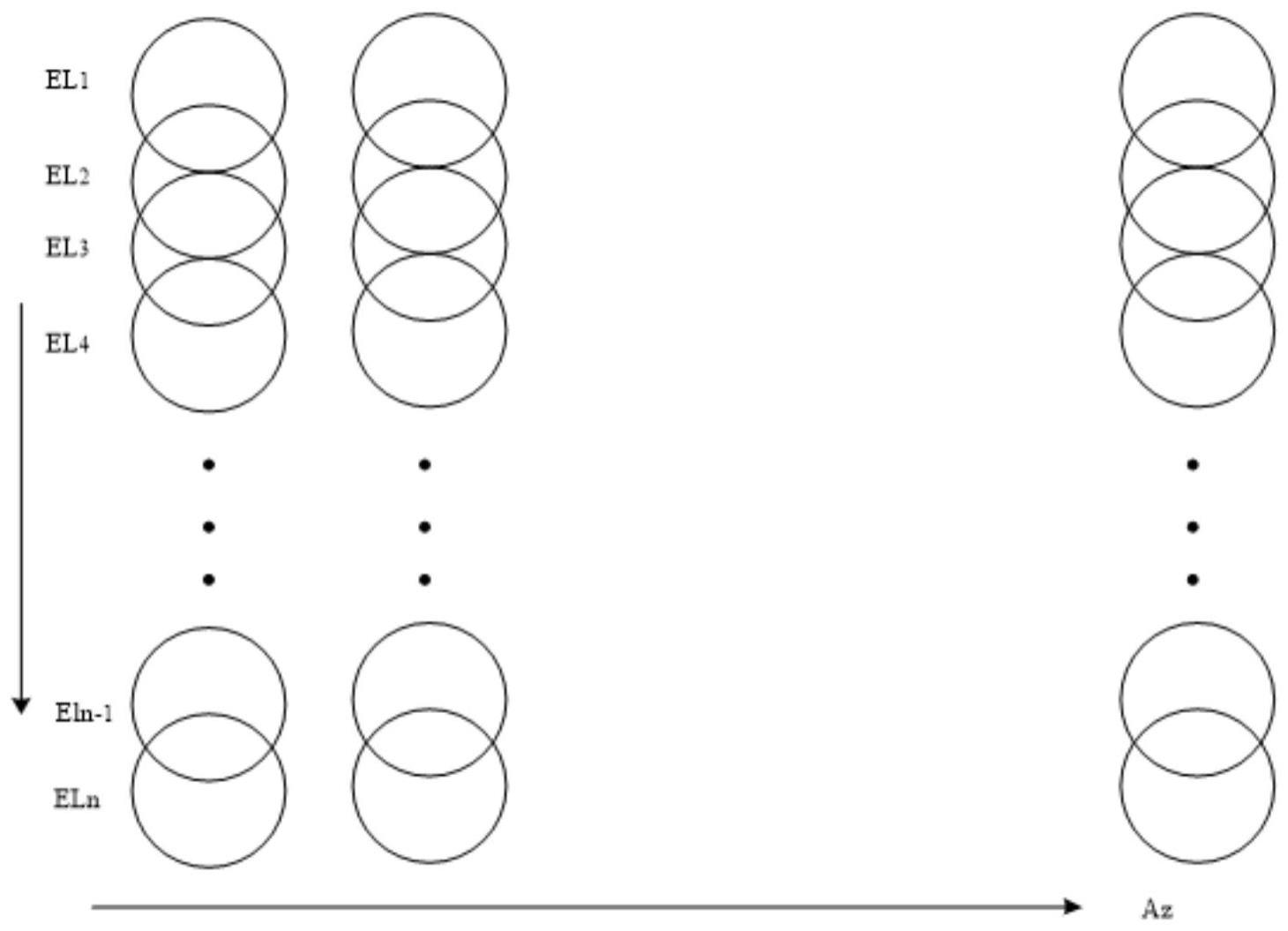
1、防撞雷达的使命任务为实时探测载机飞行前方高压线、烟囱、山峰等低空障碍物,保障直升机、无人机等低空飞行器飞行安全。参见图1,为保证目标探测的实时性,防撞雷达采用一维俯仰相扫体制,在方位扫描的同时进行俯仰扫描,实现对雷达前方一定方位、俯仰范围的立体空间快速扫描。
2、防撞雷达在载机低空飞行时使用,主要接收地物回波,具有俯仰扫描范围大、指向变化快的特点。由于雷达不同俯仰指向波束搭地距离、范围的差异,雷达接收的回波功率动态范围较大,在低俯仰指向时,雷达接收的地物回波较多,距离较近,回波信号较强,如果不控制的话,处于接收放大系统的饱和区,参见图2,致使回波信号幅度增量、没有在线性区工作,致使信息丢失,幅度增量和相位信息均有损失和相位信息丢失,不利于目标的检测和识别;高俯仰指向时,雷达接收到的地物回波较少,距离较远,信号相对较弱。为保证防撞雷达在个俯仰指向,均能使回波始终处于接收系统线性放大区,雷达接收通道设计有增益控制功能,能够在一定范围内进行回波功率大小的调节。
3、传统的方式:一维相扫防撞雷达波束捷变快如,毫秒级别,俯仰变化范围大,手动增益控制无法满足设计需求,必须采用自动增益控制agc。传统agc控制策略采用上一帧信号幅度作为参考基准,根据本帧信号的极大值作为增益调整的依据,由于一维相扫防撞雷达俯仰波束在持续变化,相邻两帧的俯仰指向不同,回波强度也不同,无法作为增益控制的有效参考,采用传统的agc控制策略计算出的增益控制量值会持续振荡,无法实现增益控制系统的稳定。理想情况下,信号与噪声的衰减量与增益控制值呈线性变化,然而,随着增益控制值的增加,噪声减小量不再与其成线性关系。这是由于当增益控制前级噪声衰减到一定程度后,由于增益控制后级噪声的存在,总体噪声将不再衰减。继续增加信号衰减量,在信号处理进行增益补偿时,会降低目标的信噪比,并且,俯仰变化快,传统的方法参考基准偏差较大,导致增益无法稳定,持续震荡,致使雷达的性能降低或不稳定。
4、有鉴于此,特提出本发明。
技术实现思路
1、本发明的目的在于提供一种一维俯仰相扫防撞雷达增益自动控制设计方法,解决现有技术的方法降低雷达使用效率的技术问题。本案的技术方案有诸多技术有益效果,见下文介绍:
2、提供一种一维俯仰相扫防撞雷达增益自动控制设计方法,其方法包括:
3、根据雷达的俯仰扫描层数,对每个所述俯仰扫描层分配一个存储区域,每个存储区域设置一个初始值;
4、获取雷达接收线性区的工作参数,所述工作参数至少包括雷达接收动态范围、ad采样范围和接收机噪声衰减特性;若,接收回波的幅度在雷达接收线性区,从而确定出采样数据范围[a1,a2],其中:a1接收线性区为下限值,a2为上限值,若当,接收回波的幅度大于上限值a2所对应信号的幅度,判定饱和信号;
5、计算雷达当前接收回波信号的幅度,将大于上限值a2所对应的信号提取出来,并计算提取信号在总信号中的占比,以确定饱和率,所述总信号为雷达接收的信号全部采样点,所述饱和率为饱和信号与当帧全部采样点的比值;
6、根据所述饱和率按预设标准划分范围段,每个所述范围段设置增益调整参考门限,并对每个所述范围段进行调整;
7、确定增益调整范围保护。
8、与现有技术相比,本发明提供的技术方案包括以下有益效果:
9、根据俯仰指向对雷达回波数据进行分层处理,对于同一俯仰层的数据,根据实时回波值的大小,动态调整增益控制值的大小,保证高俯仰指向时小功率信号不受损失,低俯仰指向时数据不饱和,幅度、相位信息完整,为后级信号处理提供优质不失真的信号,提升防撞雷达对低空弱小目标的检测能力;
10、本发明提出的根据数据饱和率进行分级判断,确定增益调整量,可以更加准确的判断雷达接收信号饱和情况,有利于合理调整增益控制量,避免因干扰引起的增益控制扰动;本发明提出的根据接收系统噪声特性设置增益衰减的上限值,可以较好的避免信号过度衰减噪声的信噪比损失。可以应用于其他俯仰波束快速捷变的相控阵雷达。解决防撞雷达在不同俯仰指向时增益控制需求不同的问题,保证高俯仰指向时小功率信号不受损失,同时又能够使低俯仰指向的回波数据处于接收系统最优的线性放大区间,最大限度降低目标信号幅度、相位、信噪比等关键信息损失,提出一种一维俯仰相扫防撞雷达增益自动控制设计方法,也应用于直升机/无人机防撞雷达系统设计。
技术特征:
1.一种一维俯仰相扫防撞雷达增益自动控制设计方法,其特征在于,其方法包括:
2.根据权利要求1所述的一维俯仰相扫防撞雷达增益自动控制设计方法,其特征在于,所述初始值为零。
3.根据权利要求1所述的一维俯仰相扫防撞雷达增益自动控制设计方法,其特征在于,根据所述饱和率按预设标准划分范围段,每个所述范围段设置增益调整参考门限,并对每个所述范围段进行调整,包括:
4.根据权利要求3所述的一维俯仰相扫防撞雷达增益自动控制设计方法,其特征在于,根据所述饱和率按预设标准划分范围段,每个所述范围段设置增益调整参考门限,并对每个所述范围段进行调整,包括:
5.根据权利要求4所述的一维俯仰相扫防撞雷达增益自动控制设计方法,其特征在于,确定增益调整范围保护,包括:
技术总结
本发明的一维俯仰相扫防撞雷达增益自动控制设计方法,其方法包括:根据雷达的俯仰扫描层数,对每个所述俯仰扫描层分配一个存储区域,每个存储区域设置一个初始值;从而确定出采样数据范围,计算雷达当前接收回波信号的幅度,将大于上限值所对应的信号提取出来,并计算提取信号在总信号中的占比,以确定饱和率,根据所述饱和率按预设标准划分范围段,每个所述范围段设置增益调整参考门限,并对每个所述范围段进行调整;确定增益调整范围保护。提高雷达的使用性能。
技术研发人员:王自娟,李志科,卢卫国
受保护的技术使用者:中国航空工业集团公司雷华电子技术研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!