用于确定两个运动之间的差值的方法和装置与流程
本发明涉及一种用于确定两个运动之间的差值的方法。本发明的主题还包括一种用于执行该方法的装置和计算机程序。
背景技术:
1、从现有技术中已知由两个被测信号(也称为测量信号)的数学变换通过使用感应式转子位置传感器来确定转子的角位置。为此,通常正弦通道提供转子角位置的相应正弦信号,并且余弦通道提供转子角位置的相应余弦信号。然后可以借助于反正切函数从正弦信号和余弦信号计算出转子的当前角位置。待测量的扭矩与两个转子的角度差成比例,其各自的角度可通过反正切函数来计算。在此,在这种扭矩传感器的上侧处的第一(上部)转子的第一角度被检测为第一测量信号,并且第二(下部)转子的第二角度被检测为第二测量信号。根据所检测的测量信号的周期性,这两个角度具有大于或等于1的特定周期性,其以该周期性在机械旋转中进行重复。
2、在第一和第二角度的角度测量的周期性相同的情况下,可以通过简单地减去两个所测量的电角度来计算差角。然而,在此可能出现扭矩传感器两侧的不期望的电感耦合。当使用不相等同的周期性时,由于反正切函数的不连续性,需要一种方法来计算在输出信号中没有跳变的差角。
3、由de 101 42 448a1已知一种用于确定对开式轴处的旋转角度和/或角度差的方法,在该轴处设置有多个具有编码的相位轨迹。每个轨迹组通过评估单元提供相位信号,其相对于轴的旋转每次都是不明确的。将至少两个相位信号加权地相加为一个信号,并且从中形成整数分量和非整数分量。非整数分量与两个轨迹组之间的角度差成比例。扭矩可通过乘以中间扭杆的弹簧刚度来确定。由信号的整数分量和相位值或借助于加权相加来确定明确的旋转角度。
4、由de 10 2008 006 865 a1已知一种特别是用于机动车的感应式扭矩传感器,其具有至少一个励磁线圈、至少一个与励磁线圈耦合且在运行期间周期性交流电压信号耦合到励磁线圈中的振荡电路、具有第一接收器装置和第二接收器装置(其分别具有多个周期性重复的接收器结构)、相对于彼此和相对于定子电路板可旋转且影响励磁线圈和接收器装置之间的电感耦合强度的至少两个转子、适用于评估在接收器装置中感应的信号的评估装置,其中第一接收器装置的接收器结构的数量和第二接收器装置的接收器结构的数量彼此成整数比。
5、由de 11 2016 005 661 t5已知一种用于转向机构的感应式扭矩和角度传感器,其具有输入轴,该输入轴通过扭杆与输出轴连接。第一耦合器与输入轴连接,而第二耦合器与输出轴连接。分别具有多个反向缠绕的圈的第一和第二接收线圈布置为分别贴靠在第一或第二耦合器处。所述第二耦合器,其中电路确定耦合器之间的角度偏移。
技术实现思路
1、根据本发明的用于确定两个运动之间差值的方法的优点在于,可以针对扭矩传感器的周期性的任何组合来计算差角。通过实现在没有浮点运算的情况下基于整数的计算算法,可以低成本地在集成电路中实现。为了计算差值从而也计算扭矩,将第一测量信号乘以第二测量信号的周期性,并从中减去乘以第一测量信号周期性的第二测量信号。在此,在计算中的多处利用可能发生的算术整数溢出。在此,测量信号被缩放为使得其分别利用用于执行该方法的装置的整数数据类型的全范围。因此,当使用整数数据类型范围为8位的装置时,360度的机械旋转运动例如相应于2^8的十进制值,等于256。当使用整数数据类型范围为16位的装置时,360度的机械旋转运动相应于2^16的十进制值65536。减法的顺序原则上是可互换的,并且只会改变符号。此外,在一个可能的实施方式中,还定义了差角的上限和下限,当超过其时设置错误状态。计算结果可被任意缩放。附加地或替代地,可以在不施加扭矩的情况下进行零点的偏移补偿。计算结果与差值的唯一性范围成比例,并且取决于两个测量信号的周期性。
2、本发明的实施方式提供了一种用于确定两个运动之间的差值的方法。在此提供了至少两个不同的测量信号,其中第一测量信号表示以第一周期性检测的第一当前机械运动,而第二测量信号表示以第二周期性检测的第二当前机械运动。第一测量信号的第一测量范围和第二测量信号的第二测量范围分别被缩放为使得其分别利用所提供的整数数据类型的完整范围。在此,基于整数算法将所检测的第一测量信号乘以第二周期性,并且可以将通过利用潜在发生的算术整数溢出所得的第一乘法结果提供用于进一步处理。基于整数算法将所检测的第二测量信号乘以第一周期性,并且可以将通过利用潜在发生的算术整数溢出所得的第二乘法结果提供用于进一步处理。基于整数算法,形成第一乘法结果和第二乘法结果之差,并且将通过利用潜在发生的算术整数溢出所得的差值提供用于进一步处理。
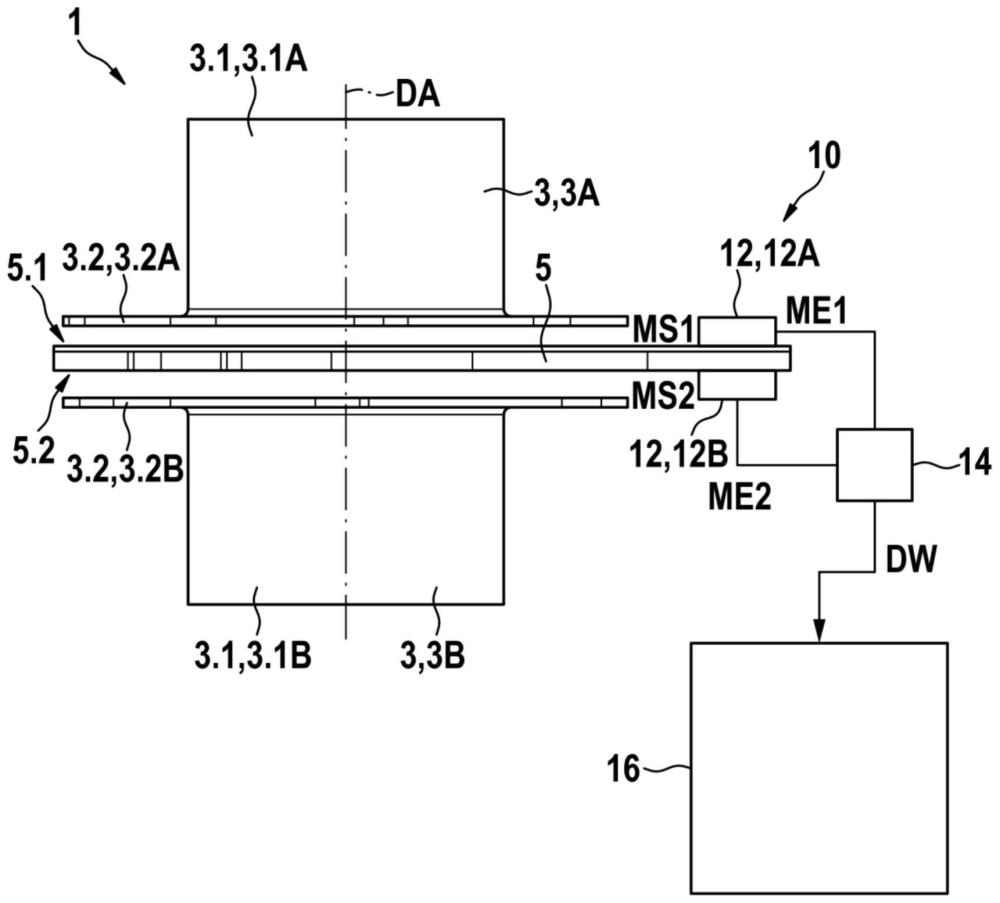
3、此外,提出了一种感应传感器组件,具有至少两个耦合装置和至少一个测量值检测装置,测量值检测装置包括具有至少一个励磁结构和至少两个接收结构的至少一个电路载体。至少一个励磁结构与至少一个振荡电路耦合,该振荡电路在运行期间将周期性的交流信号耦合到至少一个励磁结构中。至少两个耦合装置被实施为影响至少一个励磁结构和至少两个接收结构之间的感应耦合,其中至少一个评估和控制单元被实施为评估在至少两个接收结构中感应的信号,并且向计算装置提供至少两个不同的测量信号。测量值检测装置具有预定的整数数据范围,并且被配置为执行根据本发明的用于确定两个运动之间的差值的方法。
4、此外,提出了一种计算机程序,其被设置为执行根据本发明的用于确定两个运动之间的差值的方法。
5、在本文中,评估和控制单元可以被理解为处理或评估所检测的传感器信号的电气组件和电路。评估和控制单元可以具有可基于硬件和/或软件构造的接口。在基于硬件的构造方式中,接口例如可以是所谓的asic系统的包含评估和控制单元各种功能的部分。而还可行的是,接口是单独的集成电路或者至少部分地由分立元件组成。在基于软件的构造方式中,接口可以是例如与其他软件模块并存于微控制器上的软件模块。还有利的是具有程序代码的计算机程序产品,该程序代码可以存储在诸如半导体存储器、硬盘存储器或光学存储器的机器可读的载体上,并且当程序由评估和控制单元运行时用于执行评估。
6、机械运动例如可以是需要确定其当前差角位置的转子旋转运动。替待地,机械运动可以是平移运动,其路径差应借助于所检测的两个测量信号的当前差角位置来确定,其中所检测的单个测量信号的当前角位置与对应平移运动所经过的位移成比例。此外,第一机械运动可以对应于沿空间轴线的线性运动,而第二机械运动可以对应于围绕旋转轴线的旋转运动,其位移差或角度差应借助于所检测的两个测量信号的当前差角位置来确定。
7、在下文中,励磁结构被理解为具有预定匝数的发射器线圈,其发射由至少一个振荡器电路耦合的交流信号。两个接收结构优选地被实施为接收线圈,其分别具有周期性重复的环路结构。在此,两个接收结构中接收线圈的环路结构的周期性不同。
8、通过在下文中列出的措施和改进方案,可以有利地改进以上说明的用于确定两个运动之间的差值的方法。
9、特别有利的是,可以利用唯一性范围来缩放差值。唯一性范围可以基于第一周期性和第二周期性来计算。这意味着通过周期性的选择得到差角的唯一性范围。通过使用不同的周期性,可以避免不期望的感应耦合效应。
10、在该方法的有利设计方案中,两个运动可以分别对应于围绕旋转轴线的旋转运动。在此,第一测量信号可以表示代表第一机械角度的第一电角度信号,并且第二测量信号可以表示代表第二机械角度的第二电角度信号。差值表示第二机械角度和第一机械角度之间的角度差。
11、在该方法的替代设计方案中,两个运动可以分别对应于沿空间轴线的线性运动。在此,第一测量信号可以表示代表第一线性位移的第一电角度信号,并且第二测量信号可以表示代表第二线性位移的第二电角度信号。差值表示第二线性位移和第一线性位移之间的位移差。在确定位移差时,差值也可以附加地以换算因子进行缩放。
12、作为该方法的另一替代设计方案,第一机械运动可以对应于沿着空间轴线的线性运动,而第二机械运动可以对应于围绕旋转轴线的旋转运动。在此,第一测量信号可以表示代表线性位移的第一电角度信号,并且第二测量信号可以表示代表机械角度的第二电角度信号。可以将线性位移换算为机械角度,或者可以将机械角度换算为线性位移,从而差值表示角度差或位移差。
13、在该方法的另一有利设计方案中,可以将两个周期性选择为使得第一周期性与第二周期性呈非整数比。例如,可以将两个周期性选择为使得第一周期性和第二周期性具有大于1的公约数。由此,可以根据应用的需要在唯一性范围相同的情况下提高角度测量的分辨率和/或在分辨率相同的情况下增大唯一性范围。唯一性范围可以优选地根据等式(1)来计算。
14、u=gcd(p1,p2)*(360°/(p1*p2)) (1)
15、在此,(u)代表唯一性范围,(gcd)代表公约数,(p1)代表第一周期性,并且(p2)代表第二周期性。
16、差值测量的十进制分辨率可以根据等式(2)计算。
17、al=u/idtb (2)
18、在此,(al)代表差值测量的十进制分辨率,(u)代表唯一性范围,并且(idtb)代表所提供的整数数据类型范围的十进制值。对于所提供的8位整数数据类型范围,其相应于256的十进制值(idtb)。对于所提供的16位整数数据类型范围,其相应于65536的十进制值(idtb)。
- 还没有人留言评论。精彩留言会获得点赞!