观测角度重叠的多站ISAR成像方法、装置及设备
本技术涉及雷达成像,特别是涉及一种观测角度重叠的多站isar成像方法、装置及设备。
背景技术:
1、逆合成孔径雷达(isar)成像技术具有全天时全天候获取运动目标高分辨图像的能力,是空间观测与目标识别的重要手段,在军事与民用领域得到了广泛的应用。
2、isar通过目标与雷达之间累积的相对转角实现方位维高分辨成像,为获得高分辨图像,需要雷达对目标进行较长时间的观测,以获取较大的累积转角。然而,由于目标具有非合作运动,长时间观测必然导致运动补偿的困难。
3、多站isar成像技术是一种综合利用空间观测和时间观测的成像技术,利用空间中不同位置的多个阵元对目标进行观测,并对不同阵元的回波数据进行联合处理,从而实现高分辨成像。通常来讲,多站isar能够在更短的累积时间内获取更大的累积转角,从而避免单站isar在方位分辨率与运动补偿之间的矛盾。然而,当多个子站距离较近时,相邻子站的观测角存在较大的重叠部分,此时,多站isar积累得到的观测角有限,导致isar图像分辨率降低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够在多站isar的子站观测角存在较大重叠时进行高分辨成像的观测角度重叠的多站isar成像方法、装置及设备。
2、一种观测角度重叠的多站isar成像方法,所述方法包括:
3、获取目标回波信号集,所述目标回波信号集中包括由多站isar雷达的各子站分别从不同观测角度对目标进行探测,得到的子站回波信号;
4、对各所述子站回波信号依次进行平动补偿、快速傅里叶变换,得到一维距离像数据;
5、根据各所述子站的一维距离像数据以及待重构的各子站isar图像构建子站观测模型,并基于该子站观测模型将求解目标isar图像问题转换为l1范数优化问题,并得到相应的l1范数优化求解模型;
6、根据所述l1范数优化求解模型构建拉格朗日函数,根据所述拉格朗日函数构建交替方向乘子模型;
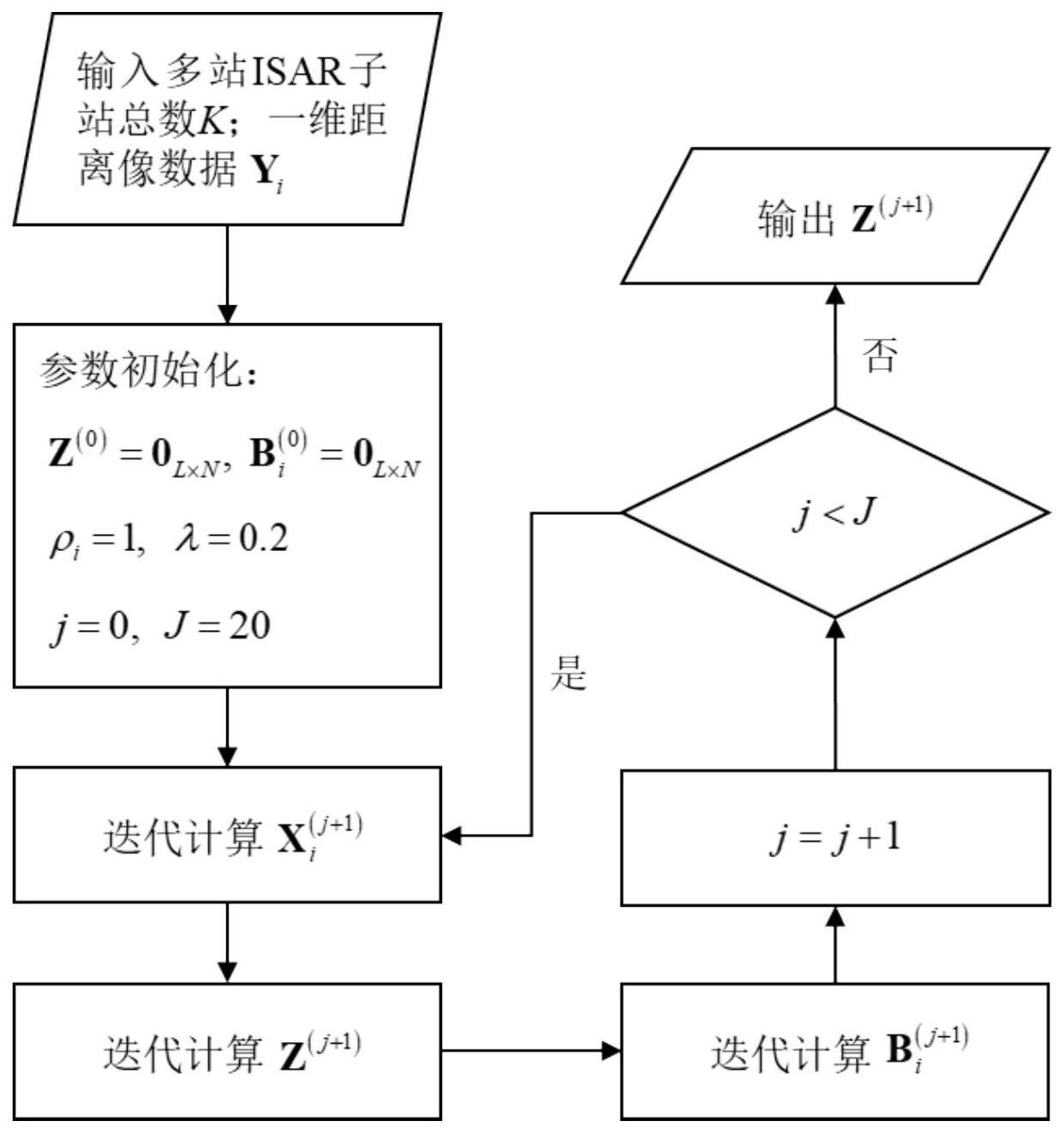
7、利用所述交替方向乘子模型以及各所述子站的一维距离像数据对目标isar图像进行迭代求解,直至迭代次数满足预设条件,则将当前迭代得到的目标isar图像作为最终的多站isar成像结果。
8、在其中一实施例中,所述子站观测模型表示为:
9、yi=axi+n=dfxi+n
10、在上式中,表示第i个子站的一维距离像数据,表示待重构的第i个子站isar图像,表示高斯白噪声矩阵,表示观测矩阵,表示傅里叶变换矩阵,表示短孔径观测矩阵。
11、在其中一实施例中,所述短孔径观测矩阵表示为:
12、
13、在上式中,im表示m×m维单位矩阵,0m×l-m表示m×l-m维全0矩阵
14、在其中一实施例中,所述l1范数优化求解模型表示为:
15、
16、s.t.xi=z
17、在上式中,||·||f和||·||1分别表示矩阵f范数和l1范数,λ表示正则化参数,k表示子站个数,表示待求解的目标isar图像。
18、在其中一实施例中,所述拉格朗日函数表示为:
19、
20、在上式中,表示拉格朗日乘子矩阵,ρi表示惩罚系数,⊙表示矩阵哈达玛积,sum(·)为求和算子,表示对矩阵中所有元素求和。
21、在其中一实施例中,所述交替方向乘子模型表示为:
22、
23、在上式中,j表示迭代次数,表示矩阵对应元素相除运算,1l×n表示尺寸为l×n的全1矩阵,表示掩码矩阵。
24、在其中一实施例中,所述掩码矩阵表示为:
25、
26、一种观测角度重叠的多站isar成像装置,所述装置包括:
27、目标回波信号集获取模块,用于获取目标回波信号集,所述目标回波信号集中包括由多站isar雷达的各子站分别从不同观测角度对目标进行探测,得到的子站回波信号;
28、回波信号处理模块,用于对各所述子站回波信号依次进行平动补偿、快速傅里叶变换,得到一维距离像数据;
29、范数优化求解模型构建模块,用于根据各所述子站的一维距离像数据以及待重构的各子站isar图像构建子站观测模型,并基于该子站观测模型将求解目标isar图像问题转换为l1范数优化问题,并得到相应的l1范数优化求解模型;
30、交替方向乘子模型构建模块,用于根据所述l1范数优化求解模型构建拉格朗日函数,根据所述拉格朗日函数构建交替方向乘子模型;
31、目标isar图像求解模块,用于利用所述交替方向乘子模型以及各所述子站的一维距离像数据对目标isar图像进行迭代求解,直至迭代次数满足预设条件,则将当前迭代得到的目标isar图像作为最终的多站isar成像结果。
32、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
33、获取目标回波信号集,所述目标回波信号集中包括由多站isar雷达的各子站分别从不同观测角度对目标进行探测,得到的子站回波信号;
34、对各所述子站回波信号依次进行平动补偿、快速傅里叶变换,得到一维距离像数据;
35、根据各所述子站的一维距离像数据以及待重构的各子站isar图像构建子站观测模型,并基于该子站观测模型将求解目标isar图像问题转换为l1范数优化问题,并得到相应的l1范数优化求解模型;
36、根据所述l1范数优化求解模型构建拉格朗日函数,根据所述拉格朗日函数构建交替方向乘子模型;
37、利用所述交替方向乘子模型以及各所述子站的一维距离像数据对目标isar图像进行迭代求解,直至迭代次数满足预设条件,则将当前迭代得到的目标isar图像作为最终的多站isar成像结果。
38、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
39、获取目标回波信号集,所述目标回波信号集中包括由多站isar雷达的各子站分别从不同观测角度对目标进行探测,得到的子站回波信号;
40、对各所述子站回波信号依次进行平动补偿、快速傅里叶变换,得到一维距离像数据;
41、根据各所述子站的一维距离像数据以及待重构的各子站isar图像构建子站观测模型,并基于该子站观测模型将求解目标isar图像问题转换为l1范数优化问题,并得到相应的l1范数优化求解模型;
42、根据所述l1范数优化求解模型构建拉格朗日函数,根据所述拉格朗日函数构建交替方向乘子模型;
43、利用所述交替方向乘子模型以及各所述子站的一维距离像数据对目标isar图像进行迭代求解,直至迭代次数满足预设条件,则将当前迭代得到的目标isar图像作为最终的多站isar成像结果。
44、上述观测角度重叠的多站isar成像方法、装置及设备,通过对由多站isar雷达系统接收到的各子站回波信号依次进行平动补偿、快速傅里叶变换后得到一维距离像数据,根据各一维距离像数据以及待重构的各子站isar图像构建子站观测模型,并基于该子站观测模型将求解目标isar图像问题转换为l1范数优化问题,并得到相应的l1范数优化求解模型,根据该求解模型构建拉格朗日函数,再根据拉格朗日函数构建交替方向乘子模型,最后利用交替方向乘子模型以及各子站的一维距离像数据对目标isar图像进行迭代求解,直至迭代次数满足预设条件,则将当前迭代得到的目标isar图像作为最终的多站isar成像结果。采用本方法可重构高分辨目标图像。
- 还没有人留言评论。精彩留言会获得点赞!