一种基于全stokes矢量的自适应水下偏振探测装置
本发明涉及水下目标探测,具体是一种基于全stokes矢量的自适应水下偏振探测装置。
背景技术:
1、水下目标探测技术是对海洋环境感知和资源开发的重要基础和前提,作为水下机器人的核心关键技术之一,其探测结果可为水下机器人等相关装备的作业提供重要指导。
2、然而,水下成像环境复杂多变,受水体吸收散射作用影响,尤其在浑浊水体强散射作用影响下,水下成像存在严重的“帷幔效应”,细节信息被淹没于背景散射光中。传统成像方法中常用的诸如颜色、亮度等特征衰减严重,导致水下图像的清晰度和系统的能见度显著降低,严重影响系统对水下目标的识别能力。此外,由于水体对光的吸收具有波长选择性,水下成像还常伴有色彩畸变等问题。
3、相比于传统光电成像技术,偏振成像技术作为一种新型的光学侦察手段,涵盖光强成像技术,除了能给出光强的测量值,同时又能给出经目标反射、折射或散射后的偏振度、偏振角、偏振椭偏率等信息。因此,偏振成像技术可通过强度信息和偏振信息的融合对目标进行探测,可获得目标更多的信息。
4、但是,在实现本发明的过程中,发明人发现现有技术存在以下问题:
5、一是现有实现全stokes矢量的偏振成像方法,为了获得stokes矢量的4个参数,需要至少四次的偏振调制测量,可以通过分时或者分焦平面的方法实现。传统分时测量的结构一般为1/4波片和线偏振器的组合,通过改变波片的方位角解调出入射光的偏振态。而对于商业单通道型分焦平面线偏振相机单次测量无法得到全stokes矢量,也需要旋转波片配合实现全stokes矢量的测量。这两种方法均不适用于对于动态目标探测。因此需要能够实现快照式测量全stokes矢量的方法。
6、二是现有的偏振成像方法均为单波长通道测量方式,或者采用插值法恢复目标场景的颜色信息,这将造成严重的颜色失真问题。因此,需要能够实现多波长通道的偏振测量方式,以恢复出水下真实色彩。
技术实现思路
1、本发明提供一种能适应低浑浊水体和高浑浊水体的目标物恢复,同时波长多通道信息的加入可同时恢复目标的颜色信息,实现目标信息维度的提升的基于全stokes矢量的自适应水下偏振探测装置。
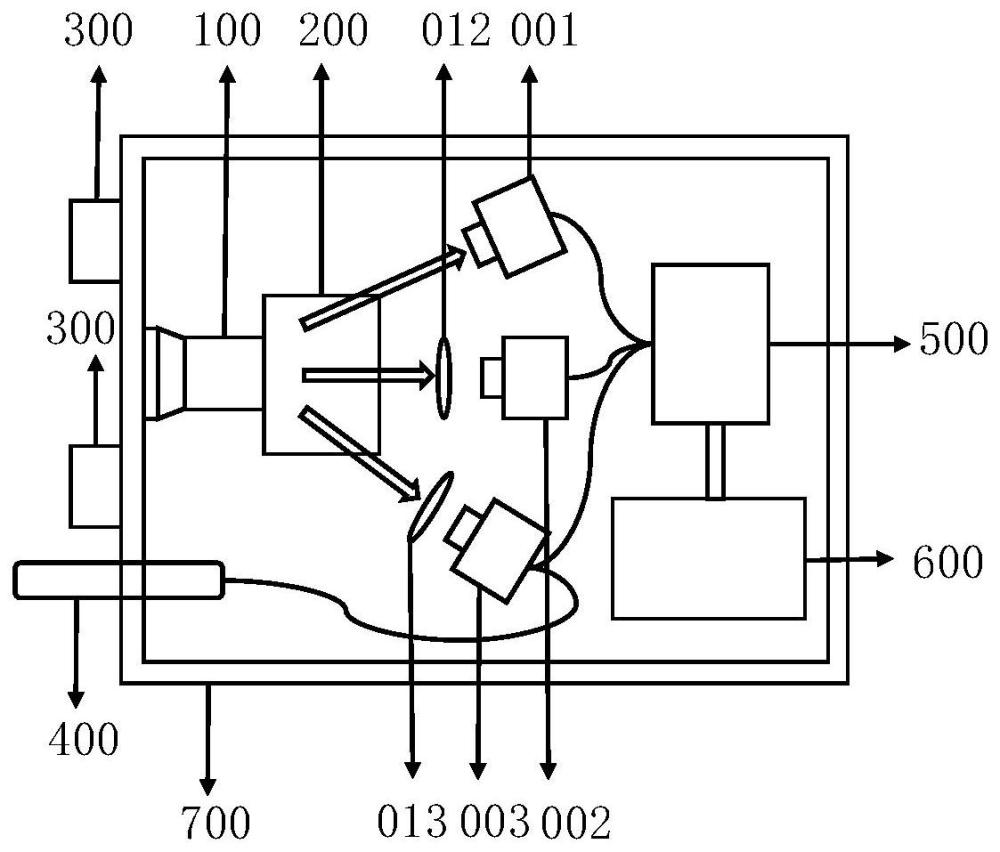
2、本发明所采用的技术方案为:一种基于全stokes矢量的自适应水下偏振探测装置,其特征在于:包括密封舱,所述密封舱外侧设有两个照明模块,所述密封舱上贯穿设有传感模块,所述密封舱内一侧设有镜头,所述镜头一侧设有分光模块,所述分光模块第一光线对照b通道偏振相机,所述分光模块第二光线通过使g和b通道波长成90度相位差的波片对照g通道偏振相机,所述分光模块第三光线通过使r和b通道波长成90度相位差的波片对照r通道偏振相机,所述密封舱内设有与b通道偏振相机、g通道偏振相机、r通道偏振相机连接的处理模块,所述处理模块连接电源模块,所述b通道偏振相机、g通道偏振相机、r通道偏振相机、使g和b通道波长成90度相位差的波片、使r和b通道波长成90度相位差的波片组合为偏振成像模块。
3、还包括光的任意偏振态可以通过斯托克斯(stokes)矢量来描述。斯托克斯矢量(s0 s1 s2s3)t四个参量的物理意义:s0正比于入射光的总光强;s1表征了光是更接近于x方向偏振(s1>0)还是y方向偏振(s2<0),s0=s1代表入射光是x轴方向振动线偏振光;s2表征了光是更接近于+45°(s2>0)方向偏振还是-45°(s2<0)方向偏振;s3表征了光是更接近于右旋圆偏振光(s3>0)还是左旋圆偏振光(s3<0)。
4、水下目标探测中,不同波长的stokes矢量包含了大量的散射成分,在一段波长范围内stokes矢量值差异不大。多波长通道偏振成像方式能够充分利用波片在不同波段提供不同的相位延迟量,实现单次采样就能分析出全stokes矢量。在单次采样中,每个超像素一共有3*4共计12组光强。理论上,只需要利用两个波长通道8组光强即可计算出完整的stokes矢量。
5、在相应波长的偏振相机前放置一块固定的波片(补偿器),根据波片在不同波段的相位延迟量不同,选取其中两个波长通道的光强,单次采样的w矩阵为:
6、
7、探测光强与stokes矢量的关系为:i=w(δ1,δ2,θ)s,δ1和δ2分别为波片在不同波长处的相位延迟量,θ为波片的固定方位角。相比与单通道的w矩阵,多通道的w矩阵提供了更多的偏振信息,具有更稳定的逆矩阵形式s=w-1i。
8、通过优化w矩阵的条件数来选择δ1和δ2以及方位角,条件数越小意味着测量得计算到stokes矢量的抗噪能力越强。通过全局优化算法可以得到当δ1和δ2的相位延迟量差值在为90°时,在任意的方位角下w矩阵条件数达到最小值2。
9、在具体应用中可选择具有双折射特性的蓝宝石作为波片。满足相应相位延迟量的双折射晶体均适用本专利。相位延迟量δ的计算公式为:
10、其中,λ为波长,d为波片的厚度,ne-no为该波长下的e光和o光的折射率差,即双折射值。
11、作为本发明进一步的方案:所述传感模块可测量当前水体浑浊度,低浑浊度水体下系统自动采用b通道偏振相机和g通道偏振相机进行工作,高浑浊度水体下传感模块发送指令信号控制r通道偏振相机进行工作,即所有偏振相机同时进行工作,以提高stokes矢量的求解精度以及成像质量。
12、作为本发明进一步的方案:所述分光模块使用三棱镜进行分光,产生r/g/b三个波长通道,分别使用三个偏振探测器进行接收,相比于一个彩色偏振探测器接收所有波长通道的光,可使总体能量利用率提升三倍。r通道波长为700nm附近,连接r通道偏振相机、g通道波长为546nm附近,连接g通道偏振相机、b通道的波长为435nm附近,连接b通道偏振相机。
13、作为本发明进一步的方案:所述偏振成像模块由1个镜头、2个波片和3个偏振相机组成。镜头焦距可调,偏振相机均为线偏振相机。其中b通道偏振相机前不放置波片;g通道偏振相机前放置可使g通道和b通道之间产生90度相位延迟量的使g和b通道波长成90度相位差的波片;r通道偏振相机前放置可使r通道和b通道之间产生90度相位延迟量的使r和b通道波长成90度相位差的波片。波片均固定,无需驱动机构,以此可实现动态快速成像。
14、作为本发明进一步的方案:所述处理模块将各偏振成像相机所获得的偏振图像进行矩阵运算,得到目标的全stokes矢量,并进行偏振去散射运算,以恢复出水下清晰图像。同时,将不同波长通道的偏振数据进行融合,还原水下目标物体的清晰色彩。
15、作为本发明进一步的方案:所述电源模块设置在所述密封舱内,用于为所述照明模块、偏振成像模块和处理模块提供工作电压。
16、本发明的有益效果:
17、本发明通过传感器所获得的水体浊度信息,控制偏振相机进行工作,从而实现全stokes矢量的获取,适应低浑浊水体和高浑浊水体的目标物恢复,同时波长多通道信息的加入可同时恢复目标的颜色信息,实现目标信息维度的提升。本发明的实施可以有效适应不同水体环境,并解决水下物体恢复时的色彩失真问题。
18、本发明提出利用多通道偏振相机结合波片补偿器,快照式测量stokes矢量的方法,该方法能够一次采样测量并计算出场景的偏振分布情况,该方法结构简单,没有复杂的光路对准与校正。
- 还没有人留言评论。精彩留言会获得点赞!