车辆路径规划方法及装置、存储介质、终端、车辆与流程
本技术涉及数据处理,尤其涉及一种车辆路径规划方法及装置、计算机可读存储介质、终端、车辆。
背景技术:
1、车辆路径规划的主要功能是根据地图信息、定位信息以及车辆状态信息等,在一定区域内搜索到一条由当前位置到目标终点的无碰撞的、安全可行的路径。目前,在进行车辆路径规划的过程中,一般会根据道路环境信息的不同将路径规划的任务分为结构化道路上的路径规划和非结构化道路上的路径规划。结构化道路具有清晰的道路标志线,包括高速公路、城市主干道等;而非结构化道路没有道路标志线,往往指乡村街道、开放环境中的道路等。在非结构化规划中,通常因为没有车道信息,因此通常只需要根据周围障碍物情况规划出一条到达终点的安全、无碰撞且高效的路径。
2、现有的车辆路径规划方案中虽然会考虑障碍物碰撞情况,但是通常倾向于选择一条行驶距离最短的路径。这种逻辑会为了使行驶距离减少而导致最终路径非常靠近障碍物,并且当障碍物检测不足够精确时,车辆按照规划路径行驶时仍然存在较高的碰撞几率。
技术实现思路
1、本技术解决的技术问题是如何兼顾车辆路径的安全性以及路径规划的成功率。
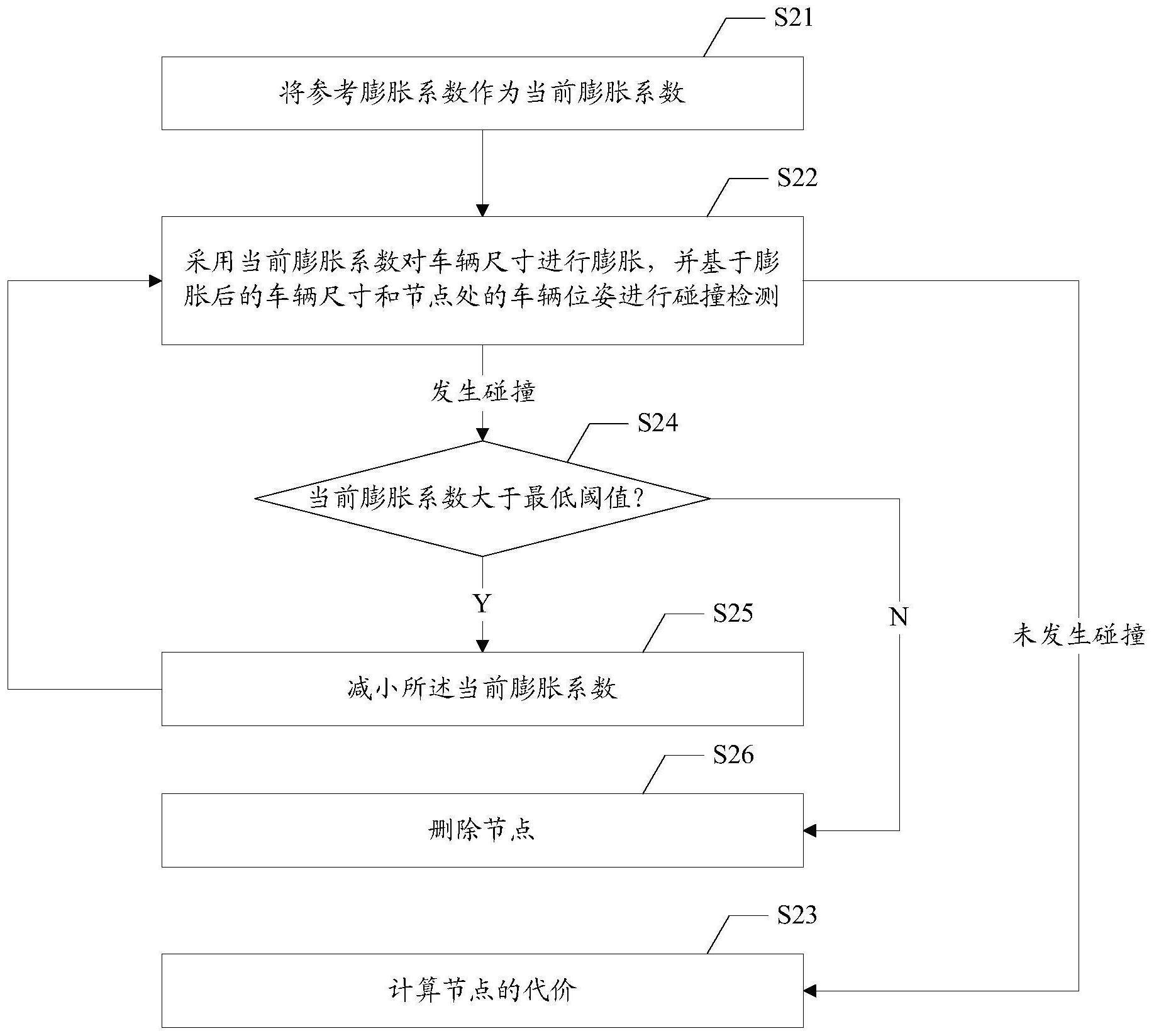
2、有鉴于此,本技术实施例提供一种车辆路径规划方法,所述方法包括:确定路径规划的起始节点和目标节点;迭代地进行一次或多次节点搜索,其中,首次节点搜索时以所述起始节点作为搜索起点,每次搜索时确定当前节点列表以及所述当前节点列表中各个节点的代价,若代价最小的节点落入所述目标节点的预设范围内,则生成目标路径,若所述代价最小的节点并未落入所述目标节点的预设范围内,则将所述代价最小的节点作为搜索起点继续进行下一次节点搜索,直至所述代价最小的节点落入所述目标节点的预设范围内;其中,确定所述当前节点列表中各个节点的代价包括:步骤一:将参考膨胀系数作为当前膨胀系数;步骤二:采用所述当前膨胀系数对车辆尺寸进行膨胀,并基于膨胀后的车辆尺寸和节点处的车辆位姿进行碰撞检测,若所述碰撞检测的检测结果为发生碰撞,则执行步骤三,否则,计算所述节点的代价;步骤三:若所述当前膨胀系数大于最低阈值,则减小所述当前膨胀系数,并返回至所述步骤二,若所述当前膨胀系数小于或等于所述最低阈值,则删除所述节点。
3、可选的,减小所述当前膨胀系数包括:从膨胀系数集合中选取小于且最接近于所述当前膨胀系数的系数,作为所述当前膨胀系数。
4、可选的,所述膨胀系数集合包括多个系数,所述参考膨胀系数为所述多个系数中的最大值,且所述多个系数中的最小值大于或等于所述最低阈值。
5、可选的,所述节点搜索包括:根据本次节点搜索的搜索起点的方向状态信息和搜索方向限制信息,确定本次节点搜索的搜索方向,其中,所述方向状态信息用于表征所述搜索起点和所述搜索起点的父节点之间的位置关系,所述搜索方向限制信息用于描述相邻两次节点搜索所采用的搜索方向之间的关系;基于所确定的搜索方向进行所述本次节点搜索。
6、可选的,所述相邻两次节点搜索所采用的搜索方向之间的关系包括以下任意一项或多项:若前一次节点搜索的搜索方向为前向,则后一次节点搜索的搜索方向为前向;若前一次节点搜索的搜索方向为后向,则后一次节点搜索的搜索方向为前向或后向;若前一次节点搜索的搜索方向为后向,则后一次节点搜索的搜索方向为后向。
7、可选的,计算所述节点的代价包括:根据所述当前膨胀系数计算所述节点的碰撞代价;根据所述节点的碰撞代价和距离代价,确定所述节点的代价。
8、可选的,代价最小的节点落入所述目标节点的预设范围的判断方法包括:若所述代价最小的节点为所述目标节点,则所述代价最小的节点落入所述目标节点的预设范围;若所述代价最小的节点不为所述目标节点,且所述代价最小的节点和所述目标节点之间的距离小于或等于预设距离,则采用启发函数曲线算法确定连接所述代价最小的节点和所述目标节点的曲线;在所述曲线上的各个采样点处进行碰撞检测,若所述各个采样点处的碰撞检测的检测结果均为不发生碰撞,则确定代价最小的节点落入所述目标节点的预设范围。
9、可选的,所述方法还包括:若确定所述目标路径生成失败,则减小所述最低阈值;基于减小后的最低阈值,重新迭代地进行一次或多次节点搜索。
10、本技术实施例还提供一种车辆路径规划装置,所述装置包括:初始化模块,用于确定路径规划的起始节点和目标节点;路径规划模块,用于迭代地进行一次或多次节点搜索,其中,首次节点搜索时以所述起始节点作为搜索起点,每次搜索时确定当前节点列表以及所述当前节点列表中各个节点的代价,若代价最小的节点落入所述目标节点的预设范围内,则生成目标路径,若所述代价最小的节点并未落入所述目标节点的预设范围内,则将所述代价最小的节点作为搜索起点继续进行下一次节点搜索,直至所述代价最小的节点落入所述目标节点的预设范围内;其中,所述路径规划模块包括:初始化子模块,用于执行步骤一,所述步骤一包括:将参考膨胀系数作为当前膨胀系数;检测子模块,用于执行步骤二,所述步骤二包括:采用所述当前膨胀系数对车辆尺寸进行膨胀,并基于膨胀后的车辆尺寸和节点处的车辆位姿进行碰撞检测,若所述碰撞检测的检测结果为发生碰撞,则执行步骤三,否则,计算所述节点的代价;判断子模块,用于执行步骤三,所述步骤三包括:若所述当前膨胀系数大于最低阈值,则减小所述当前膨胀系数,并返回至所述步骤二,若所述当前膨胀系数小于或等于所述最低阈值,则删除所述节点。。
11、本技术实施例还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器运行时,执行上述的车辆路径规划方法的步骤。
12、本技术实施例还提供一种终端,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器运行所述计算机程序时执行上述的车辆路径规划方法的步骤。
13、本技术实施例还提供一种车辆,所述车辆包括上述的终端。
14、与现有技术相比,本发明实施例的技术方案具有以下有益效果:
15、在本技术实施例的方案中,确定路径规划的起始节点和目标节点之后,迭代地进行一次或多次节点搜索,其中,首次节点搜索时以起始节点作为搜索起点,每次搜索时确定当前节点列表以及当前节点列表中各个节点的代价,若代价最小的节点落入目标节点的预设范围内,则生成目标路径,若代价最小的节点并未落入目标节点的预设范围内,则将代价最小的节点作为搜索起点继续进行下一次节点搜索,直至代价最小的节点落入目标节点的预设范围内。其中,当前节点列表中各个节点的代价采用下列步骤确定:步骤一:将参考膨胀系数作为当前膨胀系数;步骤二:采用当前膨胀系数对车辆尺寸进行膨胀,并基于膨胀后的车辆尺寸和节点处的车辆位姿进行碰撞检测,若碰撞检测的检测结果为发生碰撞,则执行步骤三,否则,计算节点的代价;步骤三:若当前膨胀系数大于最低阈值,则减小当前膨胀系数,并返回至步骤二,若当前膨胀系数小于或等于最低阈值,则删除节点。
16、上述方案中,对于搜索到的每个节点应用于多级碰撞策略,逐渐地减小用于对车辆尺寸进行膨胀的膨胀系数,以确定应用于该节点处的一个合理的膨胀系数,采用该膨胀系数对车辆尺寸进行膨胀后计算节点的代价,相较于设置一个固定的膨胀系数进行路径规划的方案而言,本技术实施例提供的方案能够兼顾车辆路径的安全性以及路径规划的成功率。
17、进一步,本技术实施例的方案中,根据本次节点搜索的搜索起点的方向状态信息和搜索方向限制信息,确定本次节点搜索的搜索方向。上述方案中,在节点搜索时设置了相邻两次节点搜索所采用的搜索方向之间的限制,有利于提高路径的合理性。
- 还没有人留言评论。精彩留言会获得点赞!