一种晶圆厚度测量方法及装置与流程
本发明涉及晶圆厚度测量,尤其涉及一种晶圆厚度测量方法及装置。
背景技术:
1、晶圆是半导体晶体圆形片的简称,最常见的是硅晶圆,另有氮化镓晶圆、碳化硅晶圆等。目前晶圆形貌量测设备主要分为测距式和干涉式两大类。其中测距式量测设备采用两个间距固定的传感器探头(电容感应式或白光共焦式)分别测量探头至晶圆上下表面的距离,将两个探头的间距减去测得的距离得到测量点的晶圆厚度。为获得晶圆的面形,测距式量测设备需扫描整个晶圆,效率较低。干涉式量测设备采用经过扩束准直的可覆盖整个晶圆的面激光照射待测晶圆,通过分析晶圆反射的测量光和参考面反射的参考光干涉形成的干涉条纹获得晶圆的面形。干涉条纹的相位差包含待测晶圆至参考面的距离信息,通过相位调制移相并提取相位差,同时补偿参考面的面形,获得待测晶圆的面形。其中掠入射干涉技术采用棱镜对光路进行偏折,使测量光接近平行晶圆表面入射。它的光程差和入射角的余弦线性相关,因此掠入射干涉仪适用于大翘曲晶圆的面形测量。
2、在干涉式量测设备中,移相干涉技术的相位提取多采用反正切函数atan2提取幅角并解包裹,周期数未知导致面形缺少厚度基准,因此干涉式量测设备在面形测量前会对晶圆厚度进行测量。标准gb/t 30867-2014中推荐采用接触式探头对晶圆厚度进行测量。探头接触晶圆易引入污染和损伤,因此接触式测厚法较少使用。常用的晶圆厚度测量方法有双探头测距法和称重法。测距法的原理如上所述,称重法则精确测量晶圆的重量,通过重量和厚度的对应关系获得晶圆的平均厚度。这些厚度测量方法均需额外添加测量模块,增加了设备的复杂度和成本。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明提供了一种晶圆厚度测量方法及装置,主要目的在于在降低设备成本的同时实现晶圆厚度的测量。
3、本发明的第一方面提供了一种晶圆厚度测量装置,包括掠入射干涉设备和控制设备;
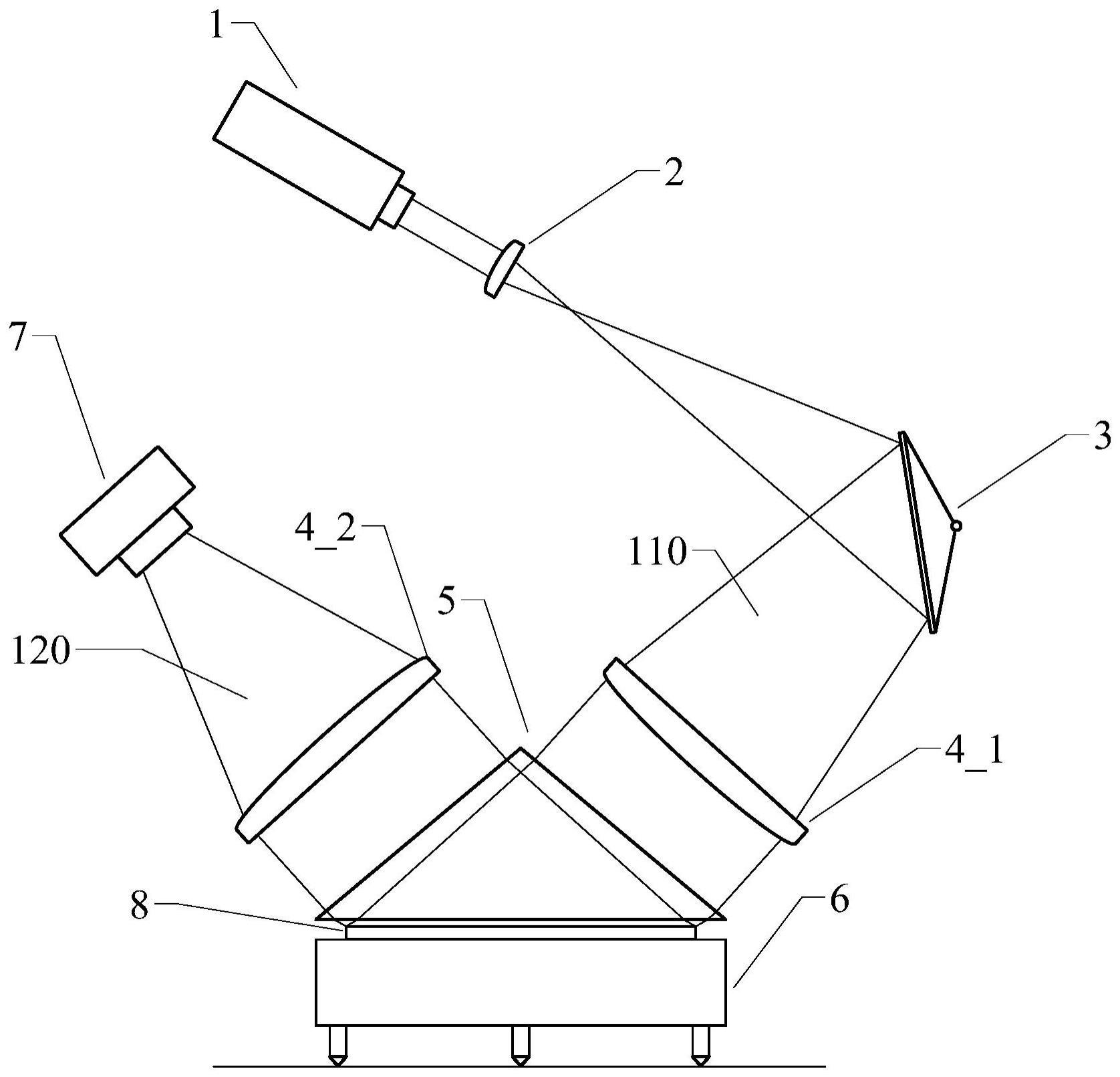
4、所述掠入射干涉设备包括光源、移相器、棱镜、吸附平台和图像传感器,所述光源发出的激光经所述移相器反射后射入棱镜,射入棱镜的入射光在棱镜底面反射得到参考光,所述入射光在棱镜底面折射并在测量面反射后再次进入棱镜得到测量光,所述参考光与所述测量光发生干涉得到携带干涉信号的出射光;所述图像传感器用于采集所述出射光的干涉信号并将干涉信号传送至控制设备;所述吸附平台包括多个促动器,吸附平台上表面用于承载晶圆,在无晶圆装载时,所述吸附平台上表面与所述棱镜底面相对,所述吸附平台上表面为测量面;在有晶圆装载时,晶圆上表面与所述棱镜底面相对,所述晶圆上表面为测量面;
5、所述控制设备,用于在接收到测量指令时,控制所述光源发出激光,控制移相器非等间隔转动预设次数以获取第一干涉信号,基于所述第一干涉信号、各促动器的位置坐标、设定的空气间隙值和各促动器的高度,控制所述促动器以调平所述吸附平台;在所述吸附平台调平的情况下,控制移相器非等间隔转动预设次数以获取第二干涉信号,基于第二干涉信号计算无晶圆时所述吸附平台上表面与所述棱镜底面间的第一间隙分布,在所述吸附平台下降后,控制移相器非等间隔转动预设次数以获取第三干涉信号,基于第三干涉信号计算有晶圆时所述晶圆上表面与所述棱镜底面间的第二间隙分布,基于所述第一间隙分布、所述促动器的位移值和所述第二间隙分布计算得到晶圆厚度。
6、在本发明第一方面提供的晶圆厚度测量装置中,所述移相器与所述控制设备连接,所述控制设备控制所述移相器按照设定需求非等间隔转动预设次数,所述设定需求指的是射入棱镜的入射光在测量面的掠入射角的余弦线性变化。
7、在本发明第一方面提供的晶圆厚度测量装置中,所述基体包括通孔结构,当所述晶圆置于所述吸附平台上表面时通过真空吸附方式使晶圆下表面和所述吸附平台上表面贴合。
8、在本发明第一方面提供的晶圆厚度测量装置中,所述掠入射干涉设备还包括透镜组,所述透镜组包括置于所述光源和所述移相器间的第一透镜、置于所述移相器与所述棱镜间的第二透镜和置于所述棱镜与所述图像传感器间的第三透镜。
9、本发明的第二方面提供了一种采用第一方面所述的晶圆厚度测量装置的晶圆厚度测量方法,包括:
10、在接收到测量指令时,控制光源发出激光;
11、调平吸附平台,调平过程包括:控制移相器非等间隔转动预设次数以使图像传感器获得包含第一干涉信号的出射光;获取图像传感器发送的第一干涉信号,基于所述第一干涉信号、吸附平台的各促动器的位置坐标、设定的空气间隙值和各促动器的高度,逐步控制所述促动器直至所述吸附平台调平;
12、在所述吸附平台调平的情况下,控制移相器非等间隔转动预设次数以获取第二干涉信号,基于所述第二干涉信号计算无晶圆装载时吸附平台上表面与棱镜底面间的第一间隙分布;
13、调节所述促动器以降低所述吸附平台,装载晶圆,控制移相器非等间隔转动预设次数以获取第三干涉信号,基于所述第三干涉信号计算有晶圆时晶圆上表面与棱镜底面间的第二间隙分布;
14、基于所述第一间隙分布、促动器的位移值和所述第二间隙分布计算得到晶圆厚度。
15、在本发明第二方面提供的晶圆厚度测量方法中,控制移相器按照设定需求非等间隔转动预设次数,所述设定需求指的是射入棱镜的入射光在测量面的掠入射角的余弦线性变化。
16、在本发明第二方面提供的晶圆厚度测量方法中,基于所述第一干涉信号、吸附平台的各促动器的位置坐标、设定的空气间隙值和各促动器的高度,逐步控制所述促动器直至所述吸附平台调平,包括:基于所述第一干涉信号计算吸附平台上表面与棱镜底面间空气间隙的间隙分布以得到拟合面参数;判断所述拟合面参数是否满足设定条件,若不满足,则基于所述各促动器的位置坐标、所述拟合面参数和所述设定的空气间隙值调节所述各促动器的高度,以获得新的第一干涉信号,进而得到新的拟合面参数;判断所述新的拟合面参数是否满足设定条件,若满足,则保持各促动器的高度,并将当前的促动器的高度作为目标高度,若不满足,则继续调节各促动器的高度直至新的拟合面参数满足设定条件,此时所述吸附平台调平。
17、在本发明第二方面提供的晶圆厚度测量方法中,基于所述第一干涉信号计算吸附平台上表面与棱镜底面间空气间隙的间隙分布以得到拟合面参数,包括:对所述第一干涉信号进行快速傅里叶变换以获得所述空气间隙的间隙分布;对所述空气间隙的间隙分布进行最小二乘拟合,以得到拟合面参数。
18、在本发明第二方面提供的晶圆厚度测量方法中,在装载晶圆时,将晶圆置于所述吸附平台上表面,通过真空吸附方式使晶圆下表面与吸附平台上表面紧贴无间隙。
19、在本发明第二方面提供的晶圆厚度测量方法中,所述基于所述第一间隙分布、促动器的位移值和所述第二间隙分布计算得到晶圆厚度,包括:计算所述第一间隙分布与所述促动器的位移值的和,再将计算的和减去所述第二间隙分布计算得到晶圆厚度。
20、在本发明一个或多个方面中,晶圆厚度测量装置包括掠入射干涉设备和控制设备;掠入射干涉设备包括光源、移相器、棱镜、吸附平台和图像传感器,光源发出的激光经移相器反射后射入棱镜,射入棱镜的入射光在棱镜底面反射得到参考光,入射光在棱镜底面折射并在测量面反射后再次进入棱镜得到测量光,参考光与测量光发生干涉得到携带干涉信号的出射光;图像传感器用于采集出射光的干涉信号并将干涉信号传送至控制设备;吸附平台包括多个促动器,吸附平台上表面用于承载晶圆,在无晶圆装载时,吸附平台上表面与棱镜底面相对,吸附平台上表面为测量面;在有晶圆装载时,晶圆上表面与棱镜底面相对,晶圆上表面为测量面;控制设备,用于在接收到测量指令时,控制光源发出激光,控制移相器非等间隔转动预设次数以获取第一干涉信号,基于第一干涉信号、各促动器的位置坐标、设定的空气间隙值和各促动器的高度,控制促动器以调平吸附平台;在吸附平台调平的情况下,控制移相器非等间隔转动预设次数以获取第二干涉信号,基于第二干涉信号计算无晶圆时吸附平台上表面与棱镜底面间的第一间隙分布,在吸附平台下降后,控制移相器非等间隔转动预设次数以获取第三干涉信号,基于第三干涉信号计算有晶圆时晶圆上表面与棱镜底面间的第二间隙分布,基于第一间隙分布、促动器的位移值和第二间隙分布计算得到晶圆厚度。在这种情况下,通过在吸附平台上增设多个促动器,通过对促动器高度的控制获得无晶圆时吸附平台上表面与棱镜底面间的第一间隙分布,及有晶圆时晶圆上表面与棱镜底面间的第二间隙分布,进而获得晶圆厚度,本发明不需增加额外的测厚设备,对掠入射干涉设备的吸附平台进行改进即可得到本发明的晶圆厚度测量装置,在降低设备成本的同时实现晶圆厚度的测量。
21、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!