一种深空多源弹性融合导航方法及系统
本发明涉及导航,具体的说,是涉及一种深空多源弹性融合导航方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、现有对深空航天器的控制技术与自主导航方法,通常还是极大程度的依赖动力学模型,依靠地面深空测控网的s波段遥测技术(unified s band,usb)、甚长基线干涉技术(very long baseline interferometry,vlbi)技术,对航天器巡航段进行测控,而惯性导航、视觉导航以及星敏感器大部分是靠近天体时进行使用;并且卫星导航系统自建成之后为人类生活提供了极大的便利,但是作为其重要功能之一的旁瓣信号似乎并没得到广泛的应用。
3、秦洪卫在2013年发表的论文《捷联惯导/星光组合导航技术研究》中,采用最小二乘微分校正的间接敏感地坪的解析算法,借助高精度星敏感器,采用数学解析算法,简单可靠且有较高的定位精度,并且提出了一种惯性、星光姿态、位置组合方式,得到精度更高的导航结果,但是只用了惯性导航和星敏感器两种传感器。2016年期刊swiss federalinstitute of technology in lausanne中发表的论文《gnss-based navigation forlunar missions》,对全球导航卫星系统(global navigation satellite system,gnss)旁瓣信号进行了详细的分析,认为gnss旁瓣信号能够为探月任务乃至地月空间飞行器提供导航手段,并且利用惯性导航、gnss旁瓣信号以及星敏感器实现了近地飞行器的高精度自主导航,虽然以及没有依赖动力学模型,但是其目标依然是500km以下的低高度飞行器。2022年发表的论文《design of the assut-ff algorithm for gto satellite cns/bdsintegrated navigation》,针对gto(地球同步转移轨道)飞行器设计了超球面分布采用自适应超球面分布采样变换无迹滤波算法(adaptive spherical simplex unscentedtransformation federated kalman filter,assut-ff),采用了星敏感器构成的天体导航系统(celestial navigation system,cns)以及北斗系统(beidou system,bds)旁瓣信号,但是同时依赖动力学模型,分析了不同算法下bds/cns组合导航的精度效果,并且论证了动力学模型失准条件下对自主导航精度的影响,实现了高精度的深空飞行器自主导航。2022年在期刊the journal of the astronautical sciences中发表的论文《comparison ofdeep space navigation using optical imaging,pulsar time-of-arrival tracking,and/or radiometric tracking》,基于光学图像、脉冲星导航以及无线电导航等多种空间导航手段,首先提出了一种简化的深空轨道确定问题,直接捕获飞行器轨道的动力学和几何特征,然后采用不同类型数据的特征确定飞行器轨道,并且研究了火星探测的巡航、接近和着陆阶段的导航问题,对不同的数据类型对求解精度的影响进行了定量分析,具有十分的重要意义。
4、上述提出的各种飞行器自主导航方法存在两类弊端:一类是传感器整合的类型较少,没有充分利用深空的多源传感器的探测数据,并且仅仅是针对低空飞行器,对深空航天器的讨论较少;另一类是依赖动力学模型,虽然能够极大提高航天器的导航精度,但是其自主性大大降低,并且对解算性能有着较高的要求,并不适合大规模航天器集群的自主导航。
技术实现思路
1、本发明提供一种深空多源弹性融合导航方法及系统,充分利用了gnss旁瓣信号、惯性导航(inertial navigation system,ins)、星敏感器以及脉冲星等深空多源观测信息,脱离了对动力学模型的依赖,能够在地月空间进行实时高效的自主导航解算。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种深空多源弹性融合导航方法,其包括:
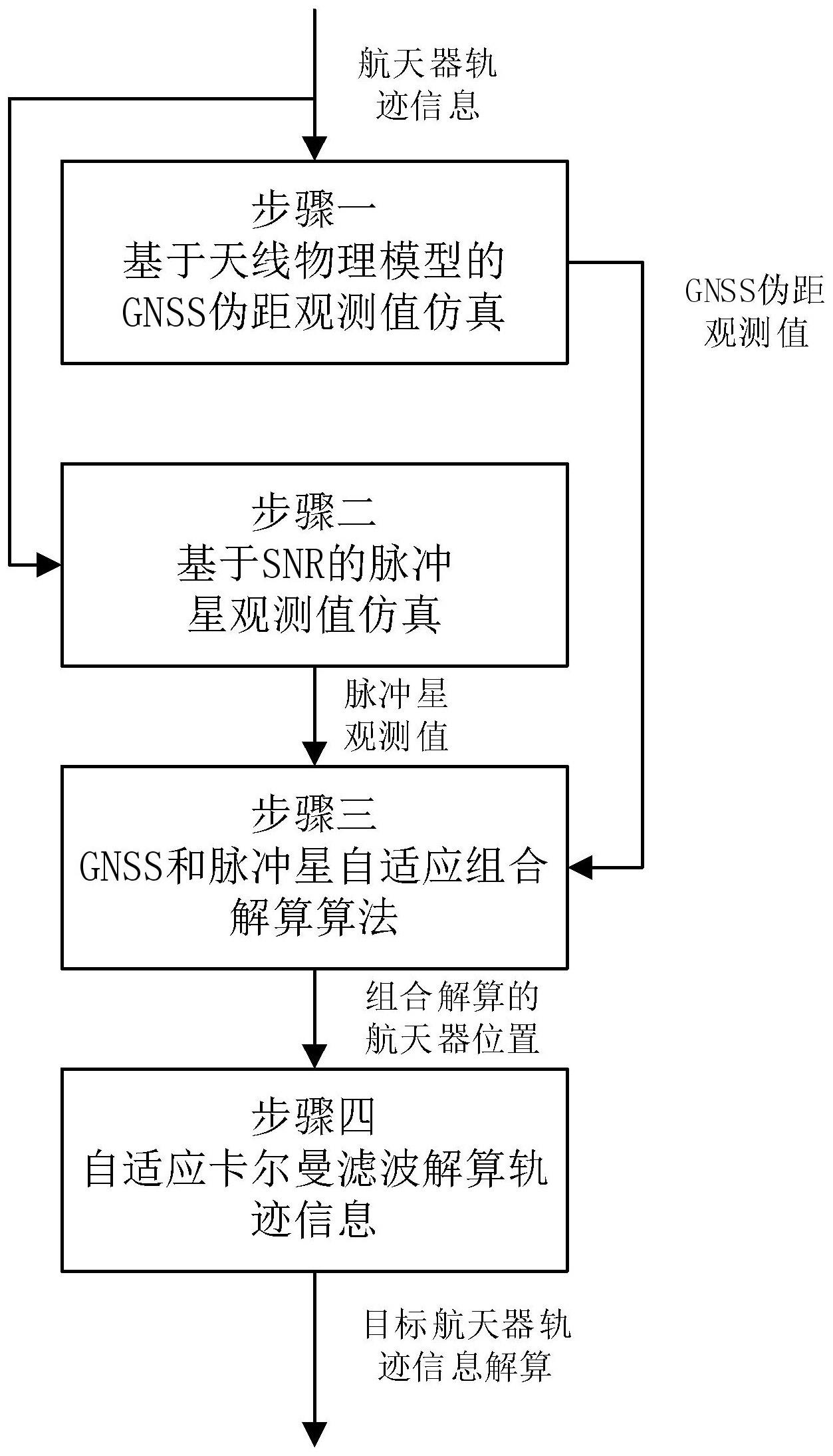
4、获取gnss采集的航天器位置和导航卫星位置,得到导航卫星与航天器之间的几何距离,并结合gnss旁瓣信号,计算得到航天器接收信号功率,基于航天器接收信号功率计算得到伪距观测值的噪声,结合所述几何距离和伪距观测值的噪声,计算得到gnss卫星的主瓣信号和旁瓣信号的伪距观测值;
5、获取航天器精密星历和脉冲星星表,仿真得到脉冲星的仿真相位观测值;
6、基于所有gnss卫星的主瓣信号和旁瓣信号的伪距观测值和所有脉冲星的仿真相位观测值,得到组合解算的航天器位置;
7、基于组合解算的航天器位置,并结合惯性传感器观测值和星敏感器观测值,滤波解算得到航天器轨迹信息。
8、进一步地,所述航天器接收信号功率为gnss旁瓣信号、接收机天线增益和自由空间传输损耗的和。
9、进一步地,所述自由空间传输损耗基于波长和导航卫星与航天器之间的几何距离计算得到。
10、进一步地,所述伪距观测值的噪声基于接收机信号信噪比,再根据设定的接收机跟踪和捕获阈值得到,其中,接收机信号信噪比基于航天器接收信号功率和环境温度计算得到。
11、进一步地,所述仿真得到脉冲星的仿真相位观测值的具体过程为:
12、根据航天器t时刻的精密星历,计算航天器在地心惯性坐标系内的坐标;
13、根据脉冲星参考时间,计算与时刻t的时间差;
14、基于时间差,利用脉冲星时间模型,计算太阳系质心坐标时的时间尺度下t时刻脉冲到太阳系质心的到达时间;
15、根据行星历表,计算t时刻地心在太阳系质心坐标系内的坐标;
16、基于t时刻地心在太阳系质心坐标系内的坐标和航天器在地心惯性坐标系内的坐标,计算航天器在太阳系质心坐标系下的坐标;
17、基于t时刻脉冲到达太阳系质心的到达时间,计算脉冲到航天器到达时间;
18、基于脉冲到航天器的到达时间,加入脉冲星距离测量误差,得到仿真的脉冲星观测值。
19、进一步地,所述组合解算的航天器位置,采用gnss和脉冲星自适应组合算法,并通过最小二乘法解算得到。
20、进一步地,所述航天器轨迹信息采用自适应卡尔曼滤波解算得到。
21、本发明的第二个方面提供一种深空多源弹性融合导航系统,其包括:
22、第一计算模块,其被配置为:获取gnss采集的航天器位置和导航卫星位置,得到导航卫星与航天器之间的几何距离,并结合gnss旁瓣信号,计算得到航天器接收信号功率,基于航天器接收信号功率计算得到伪距观测值的噪声,结合所述几何距离和伪距观测值的噪声,计算得到gnss卫星的主瓣信号和旁瓣信号的伪距观测值;
23、第二计算模块,其被配置为:获取航天器精密星历和脉冲星星表,仿真得到脉冲星的仿真相位观测值;
24、组合解算模块,其被配置为:基于所有gnss卫星的主瓣信号和旁瓣信号的伪距观测值和所有脉冲星的仿真相位观测值,得到组合解算的航天器位置;
25、滤波解算模块,其被配置为:基于组合解算的航天器位置,并结合惯性传感器观测值和星敏感器观测值,滤波解算得到航天器轨迹信息。
26、本发明的第三个方面提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述所述的一种深空多源弹性融合导航方法中的步骤。
27、本发明的第四个方面提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述所述的一种深空多源弹性融合导航方法中的步骤。
28、与现有技术相比,本发明的有益效果是:
29、本发明提供的一种深空多源弹性融合导航方法,其充分利用了目前能够在深空中长时间使用的惯性传感器、卫星导航接收机、星敏感器以及脉冲星探测器等传感器,并且脱离了对动力学模型的依赖,使其能够在地月空间进行实时高效的自主导航解算。
30、本发明提供的一种深空多源弹性融合导航方法,其针对gnss信号快速衰减的问题,采用了gnss\脉冲星组合导航的方法,能够抑制一部分误差的累积。
31、本发明提供的一种深空多源弹性融合导航方法,其可以在不依赖动力学以及地面监测站的情况下,仅依赖航天器搭载的惯性传感器、卫星导航接收机、星敏感器以及脉冲星探测器等传感器的观测信息,完成对航天器运动的位置、速度和姿态信息的快速估计,尤其针对深空场景中动力学模型未知或者不明确的情况时,几何法能够快速有效的实现航天器的自主导航,避免动力学模型不准确带来的导航误差,同时极大减少了对计算资源的占用,提高了航天器自主导航的实时性,适用于不同的复杂场景。
- 还没有人留言评论。精彩留言会获得点赞!