一种水下三维场景实时重建装置及方法与流程
本发明涉及水下图像采集,特别涉及一种水下三维场景实时重建装置及方法。
背景技术:
1、激光雷达具有捕获目标物体及其周围场景三维数据的能力,已被广泛应用于多个领域,包括无人自动驾驶汽车、大气环境探测、生物诊断等。激光雷达的另一个潜在应用领域是水下目标三维成像,将其安装在水下自主航行器上,可以提供一种以厘米分辨率进行水下探测。
2、目前,大多数激光雷达系统采取单点/扫描的方式,使用共轴对齐的激光二极管探测器,由激光器发射激光,探测器接收经目标场景反射回来的回波信息。扫描式激光雷达系统虽然能够获取较为准确的深度信息,但采集速度慢。此外,在水下环境中,激光雷达发射的激光受到水中颗粒物的散射和吸收作用,穿透能力有限。在此需求之下,单光子雪崩二极管(single-photon avalanche diode,spad)阵列应运而生。通过同时采集多个回波光子,即使在水下极低的光照条件下,spad阵列可以捕获准确快速的场景深度信息。
3、然而,使用单光子激光雷达成像进行水下目标探测时,受限于探测器数目固定的影响,难以做到较高分辨率探测。被动式光学成像是一种接收目标自身辐射或者接收目标反射的外来辐射来获取目标像的方式,它的探测器集成化程度较高,具有较高的成像分辨率和图像纹理信息。所以本发明将单光子成像激光雷达与可见光图像相融合,可以更好地解决成像激光雷达分辨率低的问题,能够同时获得目标的三维空间信息,为提高单光子成像激光雷达的分辨率与提升传统水下激光雷达或光学成像在高浑浊等强散射环境中的探测距离,提供了一种新的思路,对于水下环境中的目标检测具有重要意义。
技术实现思路
1、本发明提供了一种水下三维场景实时重建装置及方法,能够解决现有单光子激光雷达成像分辨率低、水下高浑浊强散射环境中探测距离受限的问题。
2、本发明实施例提供了一种水下三维场景实时重建装置,包括:
3、密闭箱体;
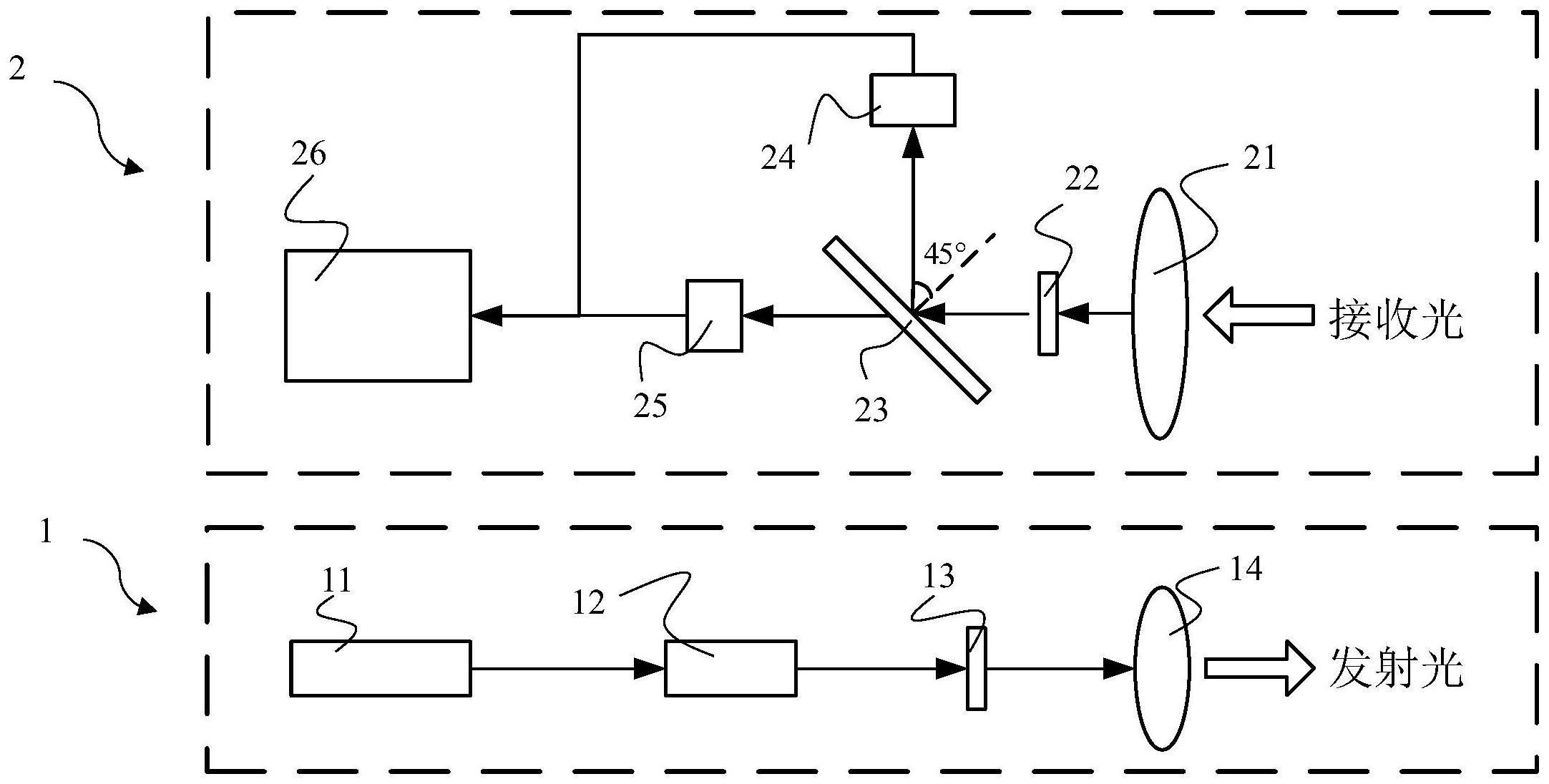
4、光路发射单元,设置于所述密闭箱体中,用于向待测目标发射激光,所述光路发射单元包括沿光路行进方向依次设置的激光光源、激光准直器、光束扩散器和第一光学透镜;
5、光路接收单元,设置于所述密闭箱体中,用于接收经所述待测目标的表面漫反射后的回波信号,所述光路接收单元包括沿光路行进方向依次设置的第二光学透镜、滤光片、分束器、单光子成像探测器和数据处理模块,所述分束器和所述数据处理模块之间还设置有可见光相机,所述分束器用于将所述回波信号平分给所述单光子成像探测器和所述可见光相机,所述可见光相机用于根据所述回波信号生成可见光图像。
6、在一种可能的设计中,所述数据处理模块,用于执行如下操作:
7、对单光子成像数据的背景环境光和暗电流噪声进行去除;其中,所述单光子成像数据是所述单光子成像探测器接收所述回收信号产生的;
8、对所述可见光图像进行去散射;
9、对处理后的所述单光子成像数据和所述可见光图像进行配准处理,得到目标图像;
10、对所述目标图像进行重构,得到水下三维场景图。
11、在一种可能的设计中,所述激光光源发射的激光波长为532nm。
12、在一种可能的设计中,所述滤光片为单通滤光片,所述单通滤光片的中心波长为532nm。
13、在一种可能的设计中,所述分束器的光轴与所述可见光相机的光线入射处光轴之间的夹角为45度。
14、在一种可能的设计中,所述单光子成像探测器和所述可见光相机均设置有信号同步控制单元,所述信号同步控制单元用于对所述单光子成像探测器和所述可见光相机进行信号同步控制。
15、在一种可能的设计中,所述单光子成像探测器采用硅基cmos单光子探测器阵列,所述单光子成像探测器的帧频至少为45帧/秒。
16、在一种可能的设计中,所述光路发射单元和所述光路接收单元采用共轴式设计。
17、在一种可能的设计中,所述密闭箱体的前面板设置有发射单元窗口和接收单元窗口;所述发射单元窗口和所述接收单元窗口均为独立部件;所述发射单元窗口直径小于所述接收单元窗口。
18、第二方面、本发明实施例提供了一种水下三维场景实时重建方法,其特征在于,应用于上述任一项实施例所述的水下三维场景实时重建装置,包括:
19、利用所述单光子成像探测器采集待测目标的单光子成像数据;
20、利用所述可见光相机采集待测目标的可见光图像;
21、利用所述数据处理模块对所述单光子成像数据的背景环境光和暗电流噪声进行去除;
22、利用所述数据处理模块对所述可见光图像进行去散射处理;
23、利用所述数据处理模块对处理后的所述单光子成像数据和所述可见光图像进行配准处理,得到目标图像;
24、利用所述数据处理模块对所述目标图像进行重构,得到所述待测目标的水下三维场景图。
25、本发明中,单光子成像探测器和可见光相机同时接收回波信号,依次对应生成同位单光子成像数据和可见光图像,对单光子成像数据进行扣除背景环境光和自身暗电流噪声处理,对可见光图像数据进行去散射清晰成像算法处理,再将处理后的单光子成像数据与处理后的可见光图像进行配准处理,最后利用图像融合算法将进行配准处理后的图像重构生成待测目标的水下三维场景图。通过将单光子成像激光雷达与可见光图像相融合,可以更好地解决成像激光雷达采集速度慢,成像分辨率低的问题,同时能够获得目标的三维空间信息,为提高单光子成像激光雷达的分辨率与提升传统水下激光雷达或光学成像在高浑浊等强散射环境中的探测距离,提供了一种新的思路,对于水下环境中的目标检测具有重要意义,同时装置整体机构简洁易安装,方便本领域技术人员进行快速调整。
技术特征:
1.一种水下三维场景实时重建装置,包括:
2.根据权利要求1所述的装置,其特征在于,所述数据处理模块,用于执行如下操作:
3.根据权利要求1所述的装置,其特征在于,所述光路发射单元和所述光路接收单元采用共轴式设计。
4.根据权利要求1所述的装置,其特征在于,所述激光光源发射的激光波长为532nm。
5.根据权利要求1所述的装置,其特征在于,所述滤光片为单通滤光片,所述单通滤光片的中心波长为532nm。
6.根据权利要求1所述的装置,其特征在于,所述单光子成像探测器采用硅基cmos单光子探测器阵列,所述单光子成像探测器的帧频至少为45帧/秒。
7.根据权利要求1所述的装置,其特征在于,所述分束器的光轴与所述可见光相机的光线入射处光轴之间的夹角为45度。
8.根据权利要求1所述的装置,其特征在于,所述单光子成像探测器和所述可见光相机均设置有信号同步控制单元,所述信号同步控制单元用于对所述单光子成像探测器和所述可见光相机进行信号同步控制。
9.根据权利要求1所述的装置,其特征在于,所述密闭箱体的前面板设置有发射单元窗口和接收单元窗口;所述发射单元窗口和所述接收单元窗口均为独立部件;所述发射单元窗口直径小于所述接收单元窗口。
10.一种水下三维场景实时重建方法,其特征在于,应用于如权利要求1-9中任一项所述的水下三维场景实时重建装置,包括:
技术总结
本说明书实施例涉及水下图像采集技术领域,特别涉及一种水下三维场景实时重建装置及方法。该装置包括:密闭箱体;光路发射单元,设置于所述密闭箱体中,所述光路发射单元包括沿光路行进方向依次设置的激光光源、激光准直器、光束扩散器和第一光学透镜;光路接收单元,设置于所述密闭箱体中,所述光路接收单元包括沿光路行进方向依次设置的第二光学透镜、滤光片、分束器、单光子成像探测器和数据处理模块,所述分束器和所述数据处理模块之间还设置有可见光相机,所述数据处理模块用于生成待测目标的水下三维场景图。本方案能够提高传统水下激光雷达在高浑浊等强散射环境中的探测距离与成像分辨率。
技术研发人员:杨敏,王云强,毛宏霞,王金舵
受保护的技术使用者:北京环境特性研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!