一种面向远距离高并行性的激光成像方法及系统
本发明属于遥感测距,具体是涉及到一种面向远距离高并行性的激光成像方法及系统。
背景技术:
1、激光雷达(lidar,light detection and ranging)因其分辨率高、精度高、检测范围长等特点,被广泛用于智能机械、自动驾驶汽车、增强现实/虚拟现实(ar/vr)以及同步定位等领域。大多数激光雷达使用脉冲激光作为光源,以获得更好的信噪比(snr)和检测范围。其工作原理是发射重复的光脉冲,并随后测量从目标反射回来的每个光脉冲的飞行时间,判断目标在延迟时间段相对应距离段内是否存在目标,并按照延迟时间的先后获得不同距离的目标的回波信号,从而获取目标的3d成像信息。
2、但是,由于常规脉冲激光雷达发出的是不特定的重复脉冲,因此,脉冲的周期性和规律性通常会导致距离模糊,并且容易受到堵塞和干扰。为了提高距离选通激光成像雷达的距离分辨率,通常需要缩短激光脉冲宽度和采样间隔,以及提高激光发射峰值功率,这将对激光器和接收系统提出苛刻要求,具体实行存在很多困难。并且在成像激光雷达对远距离目标进行成像时,由于激光器发射信号的峰值功率的限制,系统需要将脉冲宽度加宽以加大信号能量,这将近一步降低激光雷达系统的距离分辨率。同时由于采用的是单脉冲体制,目标距离限制了激光脉冲信号的重复频率,从而限制了激光雷达系统的成像速率,且成像精度较低。
技术实现思路
1、本发明提供一种面向远距离高并行性的激光成像方法及系统,以解决对远距离探测目标进行探测时成像速率和成像精度较低的问题。
2、第一方面,本发明提供一种面向远距离高并行性的激光成像方法,该方法包括如下步骤:
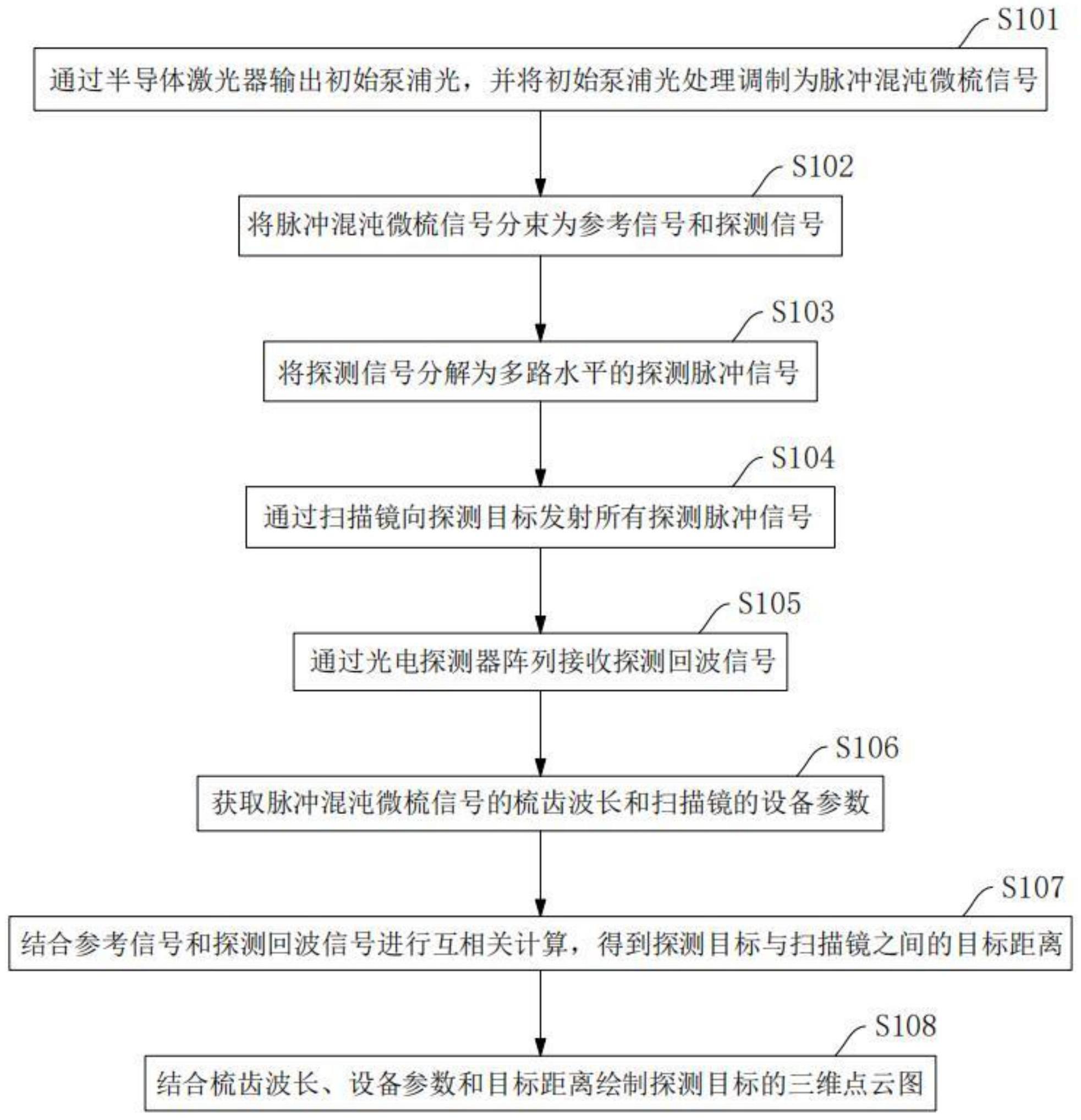
3、通过半导体激光器输出初始泵浦光,并将所述初始泵浦光处理调制为脉冲混沌微梳信号;
4、将所述脉冲混沌微梳信号分束为参考信号和探测信号;
5、将所述探测信号分解为多路水平的探测脉冲信号;
6、通过扫描镜向探测目标发射所有所述探测脉冲信号;
7、通过光电探测器阵列接收探测回波信号,所述探测回波信号为所述探测脉冲信号被所述探测目标反射的回波信号;
8、获取所述脉冲混沌微梳信号的梳齿波长和所述扫描镜的设备参数;
9、结合所述参考信号和所述探测回波信号进行互相关计算,得到所述探测目标与所述扫描镜之间的目标距离;
10、结合所述梳齿波长、所述设备参数和所述目标距离绘制所述探测目标的三维点云图。
11、可选的,所述通过半导体激光器输出初始泵浦光,并将所述初始泵浦光处理调制为脉冲混沌微梳信号包括如下步骤:
12、通过半导体激光器输出初始泵浦光;
13、将所述初始泵浦光放大为放大泵浦光;
14、调整所述放大泵浦光的偏振状态,并将调整后的所述放大泵浦光耦合进微谐振腔,产生原始混沌微梳;
15、将所述原始混沌微梳分解为并行的多根混沌微梳齿;
16、预处理所有所述混沌微梳齿,再将预处理后的所有所述混沌微梳齿脉冲调制为脉冲混沌微梳信号。
17、可选的,所述预处理所有所述混沌微梳齿,再将预处理后的所有所述混沌微梳齿脉冲调制为脉冲混沌微梳信号包括如下步骤:
18、抑制所述混沌微梳齿中的泵浦光;
19、滤除所述混沌微梳齿中的噪声信号;
20、生成晶体管-晶体管逻辑电平信号;
21、结合所述晶体管-晶体管逻辑电平信号和滤除噪声后的所述混沌微梳齿进行脉冲调制,得到脉冲混沌微梳信号。
22、可选的,所述结合所述参考信号和所述探测回波信号进行互相关计算,得到所述探测目标与所述扫描镜之间的目标距离包括如下步骤:
23、结合所述参考信号和所述探测回波信号进行互相关计算,得到所述参考信号和所述探测回波信号之间的峰值延时;
24、获取所述探测脉冲信号发射前所经过的光纤长度;
25、结合所述峰值延时和所述光纤长度计算得到所述探测目标与所述扫描镜之间的目标距离。
26、可选的,所述目标距离的计算公式如下:
27、
28、式中:d表示所述目标距离,δt表示所述峰值延时,l表示所述光纤长度。
29、第二方面,本发明还提供一种面向远距离高并行性的激光成像系统,所述系统包括半导体激光器、扫描镜和光电探测器阵列,所述系统还包括:
30、信号生成子系统,用于控制所述半导体激光器输出初始泵浦光,并将所述初始泵浦光处理调制为脉冲混沌微梳信号;
31、信号分束子系统,用于将所述脉冲混沌微梳信号分束为参考信号和探测信号;
32、信号分解子系统,将所述探测信号分解为多路水平的探测脉冲信号;
33、信号发射子系统,用于通过所述扫描镜向探测目标发射所有所述探测脉冲信号;
34、信号接收子系统,用于通过所述光电探测器阵列接收探测回波信号,所述探测回波信号为所述探测脉冲信号被所述探测目标反射的回波信号;
35、信息获取子系统,用于获取所述脉冲混沌微梳信号的梳齿波长和所述扫描镜的设备参数;
36、数据处理子系统,用于结合所述参考信号和所述探测回波信号进行互相关计算,得到所述探测目标与所述扫描镜之间的目标距离;
37、目标成像子系统,用于结合所述梳齿波长、所述设备参数和所述目标距离绘制所述探测目标的三维点云图。
38、可选的,所述信号生成子系统包括:
39、激光输出模块,用于控制所述半导体激光器输出初始泵浦光;
40、泵浦光放大模块,用于将所述初始泵浦光放大为放大泵浦光;
41、混沌微梳生成模块,用于调整所述放大泵浦光的偏振状态,并将调整后的所述放大泵浦光耦合进微谐振腔,产生原始混沌微梳;
42、混沌微梳分解模块,用于将所述原始混沌微梳分解为并行的多根混沌微梳齿;
43、信号生成模块,用于预处理所有所述混沌微梳齿,再将预处理后的所有所述混沌微梳齿脉冲调制为脉冲混沌微梳信号。
44、可选的,所述信号生成模块包括:
45、激光抑制单元,用于抑制所述混沌微梳齿中的泵浦光;
46、噪声过滤单元,用于滤除所述混沌微梳齿中的噪声信号;
47、标准电平生成单元,用于生成晶体管-晶体管逻辑电平信号;
48、信号生成单元,用于结合所述晶体管-晶体管逻辑电平信号和滤除噪声后的所述混沌微梳齿进行脉冲调制,得到脉冲混沌微梳信号。
49、可选的,所述数据处理子系统包括:
50、延时计算模块,用于结合所述参考信号和所述探测回波信号进行互相关计算,得到所述参考信号和所述探测回波信号之间的峰值延时;
51、光纤长度获取模块,用于获取所述探测脉冲信号发射前所经过的光纤长度;
52、距离计算模块,用于结合所述峰值延时和所述光纤长度计算得到所述探测目标与所述扫描镜之间的目标距离。
53、可选的,所述目标距离的计算公式如下:
54、
55、式中:d表示所述目标距离,δt表示所述峰值延时,l表示所述光纤长度。
56、本发明的有益效果是:
57、本发明通过半导体激光器输出初始泵浦光,并将初始泵浦光处理调制为脉冲混沌微梳信号。将探测信号分解为多路水平的探测脉冲信号;通过扫描镜向探测目标发射所有探测脉冲信号;通过光电探测器阵列接收探测回波信号,探测回波信号为探测脉冲信号被探测目标反射的回波信号;获取脉冲混沌微梳信号的梳齿波长和扫描镜的设备参数;结合参考信号和探测回波信号进行互相关计算,得到探测目标与扫描镜之间的目标距离;结合梳齿波长、设备参数和目标距离绘制探测目标的三维点云图。由于将初始泵浦光处理调制为脉冲混沌微梳信号的过程中使得信号能量更加集中,因此有利于提高远距离探测的成像精度。并且将探测信号分解为多路水平的探测脉冲信号,通过扫描镜向探测目标同时发射所有探测脉冲信号,相较于重复发射单束脉冲激光的测量方式,即使在远距离探测时也具有更高的测量和成像效率。
- 还没有人留言评论。精彩留言会获得点赞!