机器人定位更新方法、装置、电子设备及可读存储介质与流程
本技术涉及机器人定位,尤其涉及一种机器人定位更新方法、装置、电子设备及可读存储介质。
背景技术:
1、随着机器人定位技术的不断发展,越来越多的机器人具备有自主定位功能,进而进行任务的执行,其中,具备高定位精度的反光板定位技术得以广泛应用。
2、反光板定位技术首先按照一定规则在机器人的任务执行空间内部署反光板,进而机器人在移动过程中通过搭载的激光传感器对周围环境进行扫描,在扫描到至少三个反光板后,通过三角定位方法确定机器人的位置,但是,由于机器人在任务执行过程中可能会因轮子打滑或者累计误差等造成实际位置偏差,导致因标定在全局坐标系下的反光板位置计算得到的机器人位置与机器人实际位置存在位置偏差,进而使得易出现任务执行失败的情况,所以,当前机器人的定位精度低。
技术实现思路
1、本技术的主要目的在于提供一种机器人定位更新方法、装置、电子设备及可读存储介质,旨在解决现有技术中机器人的定位精度低的技术问题。
2、为实现上述目的,本技术提供一种机器人定位更新方法,应用于搭载有激光传感器的目标机器人,所述机器人定位更新方法包括:
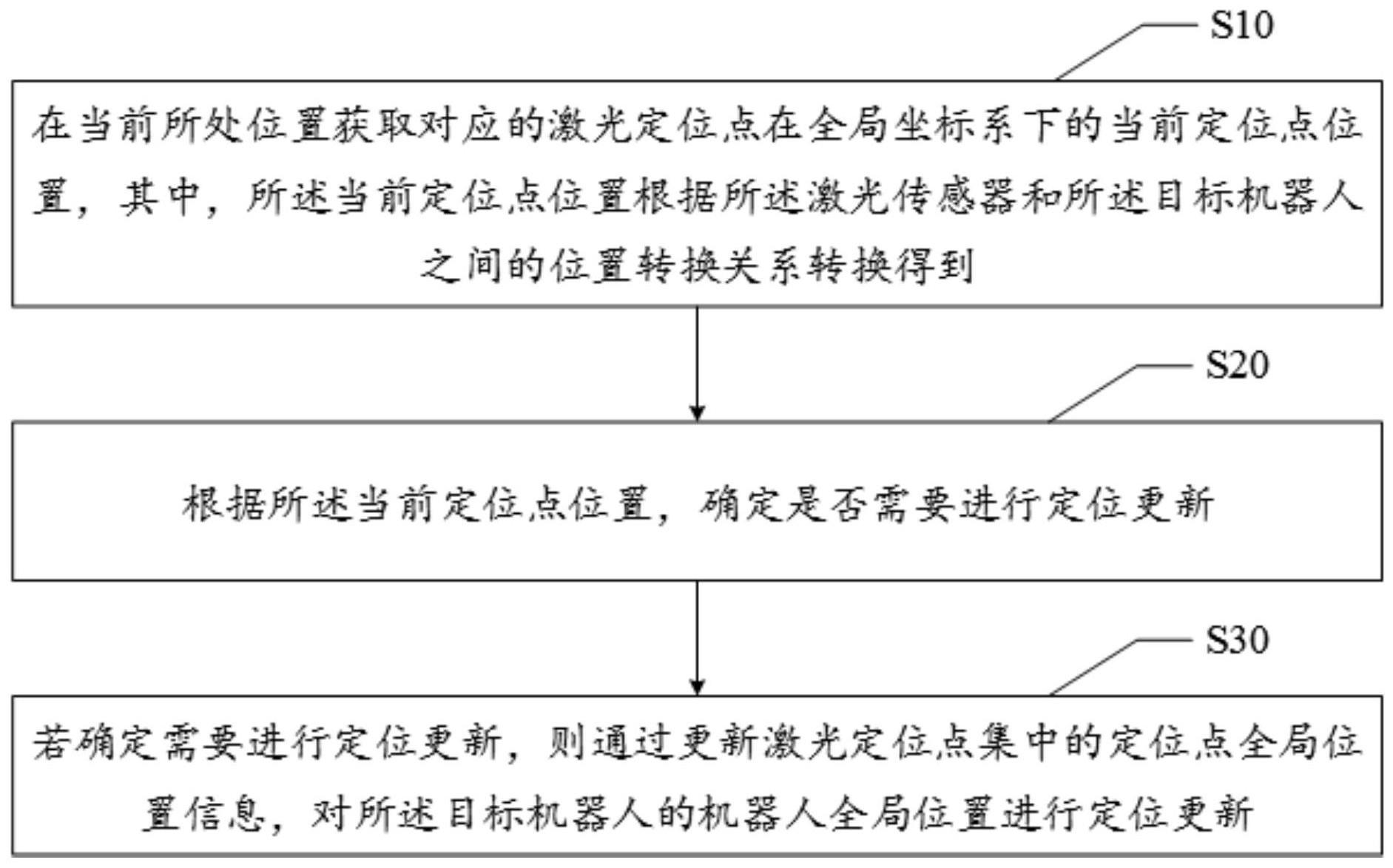
3、在当前所处位置获取对应的激光定位点在全局坐标系下的当前定位点位置,其中,所述当前定位点位置根据所述激光传感器和所述目标机器人之间的位置转换关系转换得到;
4、根据所述当前定位点位置,确定是否需要进行定位更新;
5、若确定需要进行定位更新,则通过更新激光定位点集中的定位点全局位置信息,对所述目标机器人的机器人全局位置进行定位更新。
6、可选地,所述根据所述当前定位点位置,确定是否需要进行定位更新的步骤包括:
7、检测所述当前定位点位置和所述激光定位点在所述全局坐标系下的历史定位点位置之间的位置偏差是否大于预设位置偏差阈值;
8、若大于,则确定需要进行定位更新;
9、若小于或者等于,则确定不需要进行定位更新。
10、可选地,所述定位点包括第一定位点、第二定位点和第三定位点,所述根据所述当前定位点位置,确定是否需要进行定位更新的步骤包括:
11、根据所述当前定位点位置,计算由所述第一定位点、所述第二定位点和所述第三定位点共同构成的在所述全局坐标系下的当前定位点面积;
12、根据所述当前定位点面积和历史定位点面积,确定是否需要进行定位更新,其中,所述历史定位点面积由全局坐标系下所述第一定位点、所述第二定位点和所述第三定位点在历史时间步的位置信息共同计算得到。
13、可选地,所述通过更新激光定位点集中的定位点全局位置信息,对所述目标机器人的机器人全局位置进行定位更新的步骤包括:
14、在由所述激光定位点集任意两个定位点之间组成的当前定位点约束集中选取异常定位点约束,其中,所述当前定位点约束集包括至少一个当前定位点约束,所述当前定位点约束由基准点在当前时间步对约束点进行约束得到;
15、对所述异常定位点约束对应的至少一个历史定位点约束进行聚类融合,得到定位点聚类约束,其中,所述历史定位点约束由所述基准点在历史时间步对所述约束点进行约束得到;
16、根据所述定位点聚类约束,对所述激光定位点集中的定位点全局位置信息进行更新;
17、在所述激光定位点集中的定位点全局位置信息完成更新后,对所述目标机器人的机器人全局位置进行定位更新。
18、可选地,所述在由所述激光定位点集任意两个定位点之间组成的当前定位点约束集中选取异常定位点约束的步骤包括:
19、对于所述当前定位点约束集中的任一当前定位点约束,确定当前定位点约束和在上一时间步组成的定位点约束之间的定位点约束变化量;
20、根据各所述定位点约束变化量和第一预设约束变化量阈值之间的大小关系,在所述当前定位点约束集中选取得到异常定位点约束。
21、可选地,在所述根据各所述定位点约束变化量和第一预设约束变化量阈值之间的大小关系,在所述当前定位点约束集中选取得到异常定位点约束的步骤之前,所述机器人定位更新方法还包括:
22、对于任一所述定位点约束变化量,若检测到所述定位点约束变化量小于或者等于第二预设约束变化量阈值,则将所述定位点约束变化量对应的当前定位点约束作为待选取定位点约束,其中,所述第二预设约束变化量阈值大于所述第一预设约束变化量阈值;
23、根据各所述待选取定位点约束,构建所述当前定位点约束集。
24、可选地,所述对所述目标机器人的机器人全局位置进行定位更新的步骤包括:
25、在所述激光定位点集中选取距离所述目标机器人最近的第四定位点、第五定位点和第六定位点,其中,所述第四定位点、所述第五定位点和所述第六定位点不位于同一直线;
26、根据所述第四定位点、所述第五定位点和所述第六定位点的定位点全局位置信息,计算所述目标机器人的机器人全局位置信息;
27、根据所述机器人全局位置信息,对所述机器人全局位置进行定位更新。
28、为实现上述目的,本技术提供一种机器人定位更新装置,应用于搭载有激光传感器的目标机器人,所述机器人定位更新装置包括:
29、获取模块,用于在当前所处位置获取对应的激光定位点在全局坐标系下的当前定位点位置,其中,所述当前定位点位置根据所述激光传感器和所述目标机器人之间的位置转换关系转换得到;
30、确定模块,用于根据所述当前定位点位置,确定是否需要进行定位更新;
31、定位更新模块,用于若确定需要进行定位更新,则通过更新激光定位点集中的定位点全局位置信息,对所述目标机器人的机器人全局位置进行定位更新。
32、可选地,所述确定模块还用于:
33、检测所述当前定位点位置和所述激光定位点在所述全局坐标系下的历史定位点位置之间的位置偏差是否大于预设位置偏差阈值;
34、若大于,则确定需要进行定位更新;
35、若小于或者等于,则确定不需要进行定位更新。
36、可选地,所述定位点包括第一定位点、第二定位点和第三定位点,所述确定模块还用于:
37、根据所述当前定位点位置,计算由所述第一定位点、所述第二定位点和所述第三定位点共同构成的在所述全局坐标系下的当前定位点面积;
38、根据所述当前定位点面积和历史定位点面积,确定是否需要进行定位更新,其中,所述历史定位点面积由全局坐标系下所述第一定位点、所述第二定位点和所述第三定位点在历史时间步的位置信息共同计算得到。
39、可选地,所述定位更新模块还用于:
40、在由所述激光定位点集任意两个定位点之间组成的当前定位点约束集中选取异常定位点约束,其中,所述当前定位点约束集包括至少一个当前定位点约束,所述当前定位点约束由基准点在当前时间步对约束点进行约束得到;
41、对所述异常定位点约束对应的至少一个历史定位点约束进行聚类融合,得到定位点聚类约束,其中,所述历史定位点约束由所述基准点在历史时间步对所述约束点进行约束得到;
42、根据所述定位点聚类约束,对所述激光定位点集中的定位点全局位置信息进行更新;
43、在所述激光定位点集中的定位点全局位置信息完成更新后,对所述目标机器人的机器人全局位置进行定位更新。
44、可选地,所述定位更新模块还用于:
45、对于所述当前定位点约束集中的任一当前定位点约束,确定当前定位点约束和在上一时间步组成的定位点约束之间的定位点约束变化量;
46、根据各所述定位点约束变化量和第一预设约束变化量阈值之间的大小关系,在所述当前定位点约束集中选取得到异常定位点约束。
47、可选地,所述机器人定位更新模块还用于:
48、对于任一所述定位点约束变化量,若检测到所述定位点约束变化量小于或者等于第二预设约束变化量阈值,则将所述定位点约束变化量对应的当前定位点约束作为待选取定位点约束,其中,所述第二预设约束变化量阈值大于所述第一预设约束变化量阈值;
49、根据各所述待选取定位点约束,构建所述当前定位点约束集。
50、可选地,所述机器人定位更新装置还用于:
51、在所述激光定位点集中选取距离所述目标机器人最近的第四定位点、第五定位点和第六定位点,其中,所述第四定位点、所述第五定位点和所述第六定位点不位于同一直线;
52、根据所述第四定位点、所述第五定位点和所述第六定位点的定位点全局位置信息,计算所述目标机器人的机器人全局位置信息;
53、根据所述机器人全局位置信息,对所述机器人全局位置进行定位更新。
54、本技术还提供一种电子设备,所述电子设备包括:存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的所述机器人定位更新方法的程序,所述机器人定位更新方法的程序被处理器执行时可实现如上述的机器人定位更新方法的步骤。
55、本技术还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有实现机器人定位更新方法的程序,所述机器人定位更新方法的程序被处理器执行时实现如上述的机器人定位更新方法的步骤。
56、本技术还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述的机器人定位更新方法的步骤。
57、本技术提供了一种机器人定位更新方法、装置、电子设备及可读存储介质,也即,在当前所处位置获取对应的激光定位点在全局坐标系下的当前定位点位置,其中,所述当前定位点位置根据所述激光传感器和所述目标机器人之间的位置转换关系转换得到;根据所述当前定位点位置,确定是否需要进行定位更新;若确定需要进行定位更新,则通过更新激光定位点集中的定位点全局位置信息,对所述目标机器人的机器人全局位置进行定位更新。由于目标机器人会在当前所处位置实时确定激光定位点在全局坐标系下的当前定位点位置,而当前定位点位置是根据激光传感器与目标机器人之间的位置转换关系转换得到,即,通过位置转换关系以及目标机器人和激光定位点之间的距离转换得到激光定位点在全局坐标系下的实时定位点位置,进而目标机器人可根据移动过程中激光定位点的当前定位点位置,对目标机器人的位置进行实时判定,以确定是否需要进行定位更新,最终在需要进行定位更新时通过更新激光定位点集中的定位点全局位置信息,对目标机器人在全局坐标系下的机器人位置进行定位更新,也即,即可实现在根据激光定位点的实时位置情况确定需要进行定位更新时,通过定位点全局位置信息自主进行全局坐标系下的位置实时定位更新的目的。而非在机器人定位更新的过程中只能依赖于提前标定的激光定位点位置进行定位更新。所以克服了由于机器人在任务执行过程中可能会因轮子打滑或者累计误差等造成实际位置偏差,导致因标定在全局坐标系下的反光板位置计算得到的机器人位置与机器人实际位置存在位置偏差,进而使得易出现任务执行失败的情况的技术缺陷,所以,提升了机器人的定位精度。
- 还没有人留言评论。精彩留言会获得点赞!