一种港口区域无人机巡检路径搜索方法
本发明涉及港口安全监管,尤其是涉及一种港口区域无人机巡检路径搜索方法。
背景技术:
1、港口是涉及多种人员、配备多种设备以及需要完成多种繁杂任务的高密度人机交叉作业集合体,港口生产危险系数高,容易发生事故。现如今安全风险智能化识别与研判的手段不足,限制了港口安全监管的效率。
2、传统的港口安全监管存在以下局限:
3、1)传统港口监管主要是依靠人员巡检与固定的监控设备,监管人员须亲临现场,监控范围存在死角,耗费大量的人力成本。
4、2)传统监管手段单一,无法充分识别不同事故隐患并最大化降低港口事故率。
5、3)现有的无人机巡检方式多为往返式巡检,路径规划不合理,造成资源浪费,巡检效率低。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供了一种巡检效率高的港口区域无人机巡检路径搜索方法。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明提供了一种港口区域无人机巡检路径搜索方法,该方法包括以下步骤:
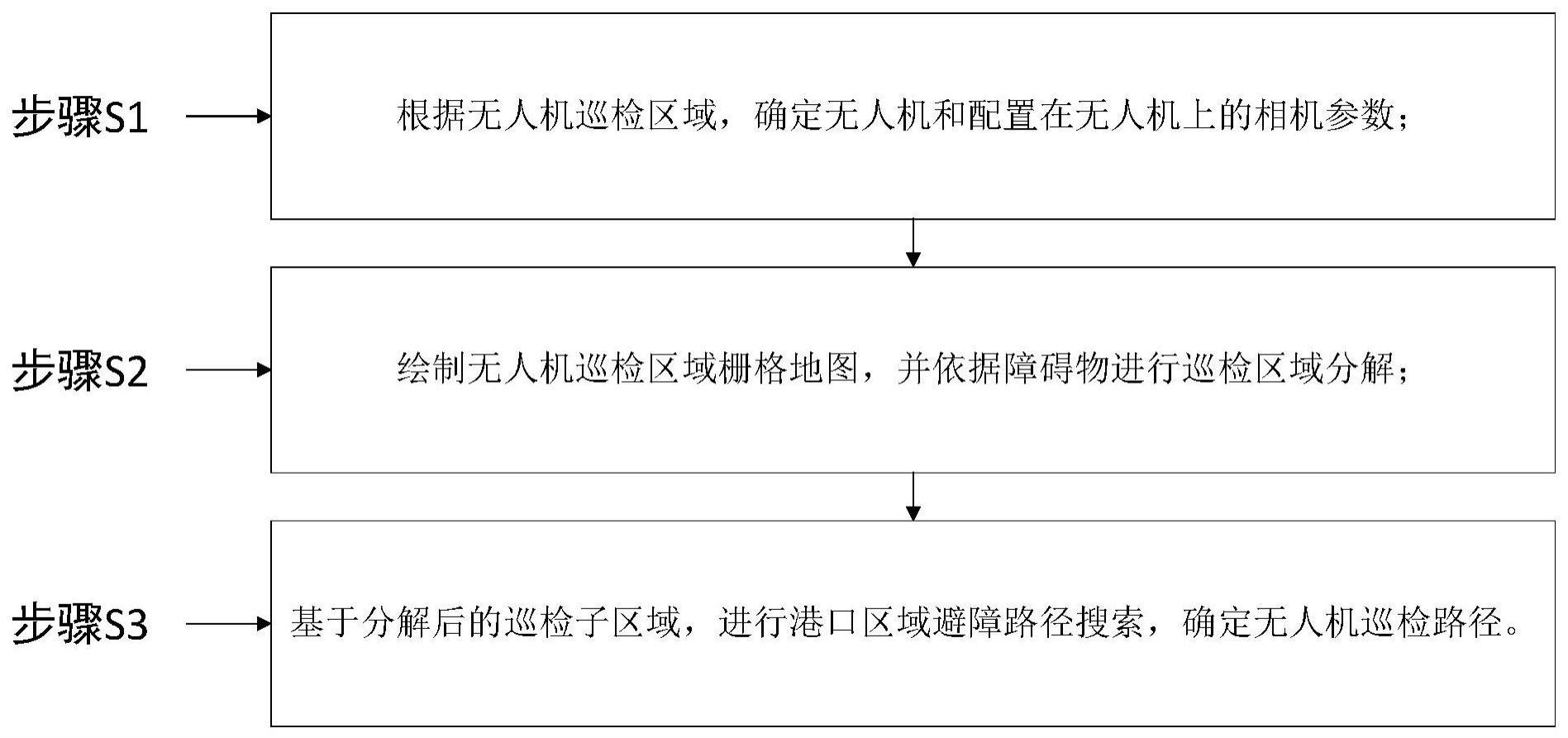
4、步骤s1、根据无人机巡检区域,确定无人机和配置在无人机上的相机参数;
5、步骤s2、绘制无人机巡检区域栅格地图,并依据障碍物进行巡检区域分解;
6、步骤s3、基于分解后的巡检子区域,进行港口区域避障路径搜索,确定无人机巡检路径。
7、优选地,步骤s1中,根据无人机飞行高度以及地面分辨率需求确定相机参数。
8、优选地,所述相机的地面分辨率至少为1cm/px。
9、优选地,所述步骤s2中绘制无人机巡检区域栅格地图,具体为:根据单架次单张照片拍摄面积,获得无人机的单架次扫描宽度,最终确定栅格地图每单元栅格的边长代表的实际长度,得到无人机巡检区域栅格地图。
10、优选地,在栅格地图中根据障碍物比例随机设置障碍物位置,或根据环境变化在指定位置添加障碍物,或根据实际地图进行栅格化建模,将禁飞区量化在栅格地图中,得到含有障碍物的无人机巡检区域栅格地图。
11、优选地,所述依据障碍物进行巡检区域分解,具体为:采用矩形分解法对无人机巡检区域栅格地图进行划分,使得划分后的每个子区域不再含有障碍物。
12、优选地,所述禁飞区包括堆场间的办公区、停车场和空堆场。
13、优选地,所述无人机巡检区域栅格地图采用colormap函数自定义不同栅格单元的颜色,以对应栅格属性;所述栅格属性包括障碍物、路径起点和路径终点。
14、优选地,所述步骤s3具体为:将子区域的中心坐标作为子区域节点,采用路径规划算法求得最短遍历路径,确定无人机在子区域间的遍历顺序,按遍历顺序依次完成不同子区域中的避障连接,得到最终的无人机巡检路径;
15、其中,当无人机结束当前子区域的遍历到达当前子区域的终点后,无法直接飞往下一子区域的起点时,两点间存在障碍物时,通过a*算法得到两点之间的最优路径。
16、优选地,所述路径规划算法为蚁群算法。
17、与现有技术相比,本发明具有以下有益效果:
18、1)本发明的巡检路径能够在100%覆盖巡检区域的基础上,有效减少无人机的拐角数量、路径重复率和路径总长度,提高无人机港口巡检效率。
19、2)本发明分别采用蚁群算法规划子区域遍历路径,利用a*算法进行障碍物路径规划,提高了巡检效率。
20、3)本发明根据栅格地图和障碍物设定,结合无人机的飞行限制,可合理规划路径有效避开障碍物。
21、4)本发明利用无人机搭载智能检测设备进行港口的巡检,利于推进智慧化港口建设明能够根据港口实际环境,为无人机快速规划出巡检路径,为港口的安全管理和应急响应决策提供有力支撑,降低港口事故率及事故造成的损失。
技术特征:
1.一种港口区域无人机巡检路径搜索方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种港口区域无人机巡检路径搜索方法,其特征在于,步骤s1中,根据无人机飞行高度以及地面分辨率需求确定相机参数。
3.根据权利要求2所述的一种港口区域无人机巡检路径搜索方法,其特征在于,所述相机的地面分辨率至少为1cm/px。
4.根据权利要求1所述的一种港口区域无人机巡检路径搜索方法,其特征在于,所述步骤s2中绘制无人机巡检区域栅格地图,具体为:根据单架次单张照片拍摄面积,获得无人机的单架次扫描宽度,最终确定栅格地图每单元栅格的边长代表的实际长度,得到无人机巡检区域栅格地图。
5.根据权利要求4所述的一种港口区域无人机巡检路径搜索方法,其特征在于,在栅格地图中根据障碍物比例随机设置障碍物位置,或根据环境变化在指定位置添加障碍物,或根据实际地图进行栅格化建模,将禁飞区量化在栅格地图中,得到含有障碍物的无人机巡检区域栅格地图。
6.根据权利要求5所述的一种港口区域无人机巡检路径搜索方法,其特征在于,所述依据障碍物进行巡检区域分解,具体为:采用矩形分解法对无人机巡检区域栅格地图进行划分,使得划分后的每个子区域不再含有障碍物。
7.根据权利要求5所述的一种港口区域无人机巡检路径搜索方法,其特征在于,所述禁飞区包括堆场间的办公区、停车场和空堆场。
8.根据权利要求5所述的一种港口区域无人机巡检路径搜索方法,其特征在于,所述无人机巡检区域栅格地图采用colormap函数自定义不同栅格单元的颜色,以对应栅格属性;所述栅格属性包括障碍物、路径起点和路径终点。
9.根据权利要求1所述的一种港口区域无人机巡检路径搜索方法,其特征在于,所述步骤s3具体为:将子区域的中心坐标作为子区域节点,采用路径规划算法求得最短遍历路径,确定无人机在子区域间的遍历顺序,按遍历顺序依次完成不同子区域中的避障连接,得到最终的无人机巡检路径;
10.根据权利要求9所述的一种港口区域无人机巡检路径搜索方法,其特征在于,所述路径规划算法为蚁群算法。
技术总结
本发明涉及一种港口区域无人机巡检路径搜索方法,该方法包括以下步骤:步骤S1、根据无人机巡检区域,确定无人机和配置在无人机上的相机参数;步骤S2、绘制无人机巡检区域栅格地图,并依据障碍物进行巡检区域分解;步骤S3、基于分解后的巡检子区域,进行港口区域避障路径搜索,确定无人机巡检路径。与现有技术相比,本发明具有巡检效率高的优点。
技术研发人员:雷超,李灿,王琪,梁云昊
受保护的技术使用者:上海海事大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!