一种静止状态下视觉惯性里程计抗动态物体干扰方法与流程
本发明涉及虚拟架构优化,特别涉及一种静止状态下视觉惯性里程计抗动态物体干扰方法。
背景技术:
1、近年来虚拟架构优化技术发展迅猛,应用越来越广泛,为社会的生产生活带来了巨大的效益,未来的发展前景及空间巨大,在机器人行业、自动驾驶行业对虚拟架构优化系统的市场需求彻底引爆。由于虚拟架构优化系统容易受动态物体干扰,这种抗动态物体干扰技术,成为交通枢纽、商场、工厂等人口密集处机器人正常作业的利器。
2、随着工业设计的改进与生产生活方式的改变,人们对智能化机器人的要求越来越高,人们希望机器人能帮助自己极大的提高工作效率,且不易受外界动态物体的干扰。而清洁机器人、巡检机器人等,最重要的功能为抗动态物体干扰,因此一套基于虚拟架构优化系统的抗动态物体的方案应运而生。
3、市面上大多数虚拟架构优化系统采用ai识别的设计思路,但使用ai识别的方案不能识别到非标注物体,在使用场景容易受限,为此,提出一种静止状态下视觉惯性里程计抗动态物体干扰方法。
技术实现思路
1、有鉴于此,本发明实施例希望提供一种静止状态下视觉惯性里程计抗动态物体干扰方法,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
2、本发明实施例的技术方案是这样实现的:一种静止状态下视觉惯性里程计抗动态物体干扰方法,包括:
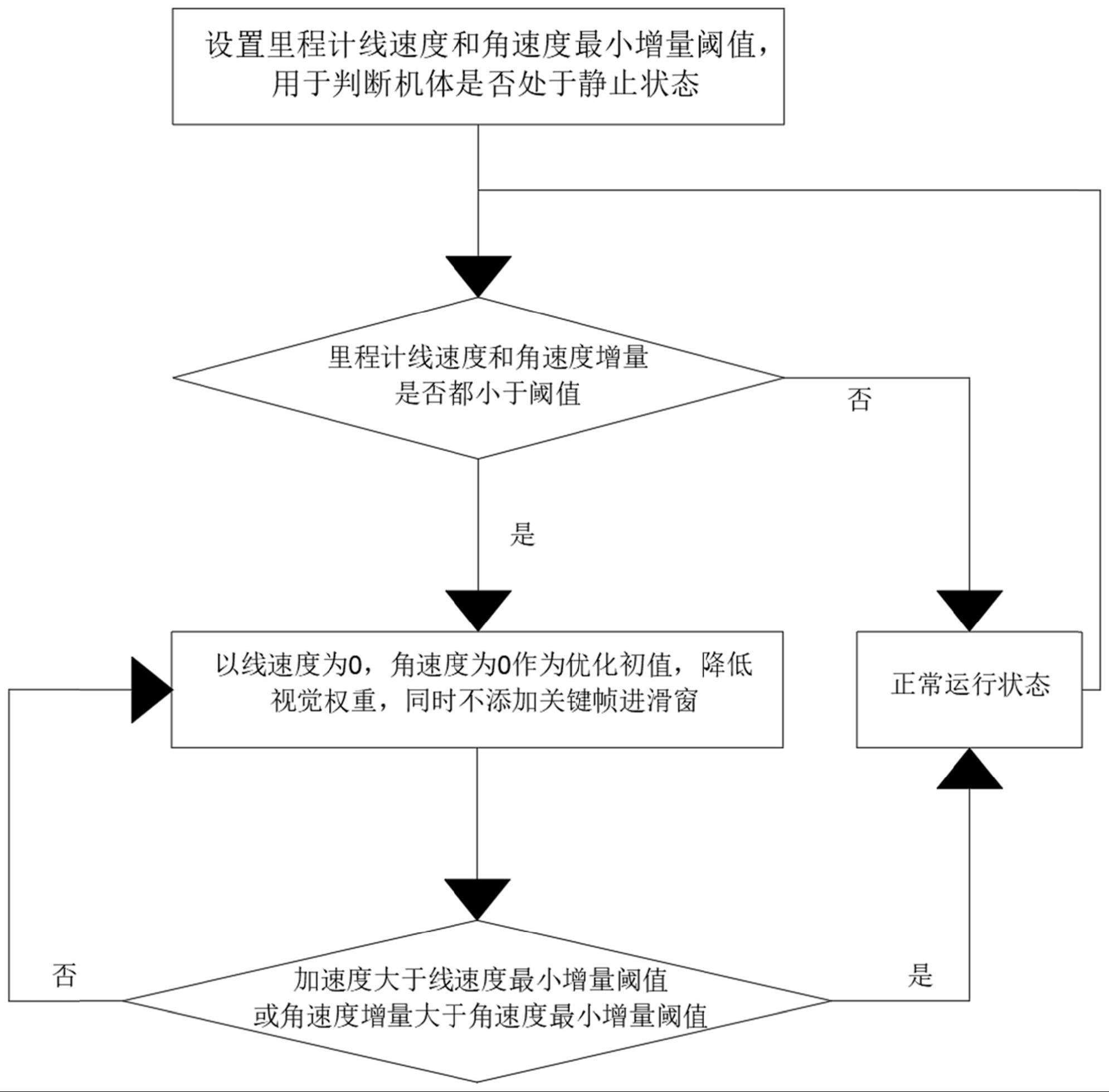
3、s1、设置里程计线速度和角速度最小增量阈值,根据所述参数判断机体是否处于静止状态;
4、s2、判断当前里程计线速度和角速度增量是否都小于阈值,若小于阈值,则机体处于静止状态;
5、s3、当机体处于静止状态时,以线速度为0,角速度为0作为优化初值,降低视觉权重,同时不添加关键帧进滑窗;
6、s4、根据imu的加速度最小增量阈值或角速度增量判定其是否大于角速度最小增量阈值,并在imu的加速度大于线速度最小增量阈值或角速度增量大于角速度最小增量阈值后,视觉重新恢复权重和正常添加关键帧。
7、在一些实施例中:所述s1包括以下步骤,
8、s11、判断所述参数中是否有手动配置,当存在配置输入时,则静止判断阈值使用配置阈值;
9、当不存在配置输入时,设备在线估计线速度和角速度随机噪声大小,并用两倍于随机噪声作为该静止判断阈值。
10、在一些实施例中:所述s1还包括以下步骤,
11、s12、若配置项没赋值是,利用s11的在线估计随机噪声的方法,可以将该两倍于随机噪声的值作为静止判断阈值保存到配置项中,用于后续再次使用设备时使用,减少因需要在线估计随机噪声而产生的算力开销。
12、在一些实施例中:所述s4包括以下步骤:
13、s41、因为恢复设备运动状态根据imu数据,在使用之前需要做六轴矫正,使imu噪声处于0均值状态。
14、在一些实施例中:所述s4中,imu的加速度小于线速度最小增量阈值或角速度增量小于角速度最小增量阈值后,需要回到s2中判断当前里程计线速度和角速度增量是否都小于阈值。
15、在一些实施例中:所述s2中,若当前里程计线速度和角速度增量都大于阈值,则视觉重新恢复权重和正常添加关键帧。
16、在一些实施例中:所述s4中,视觉重新恢复权重和正常添加关键帧时需要不定期回到s2中判断当前里程计线速度和角速度增量是否都小于阈值。
17、在一些实施例中:在所述s41中,六轴包括三轴加速度计和三轴陀螺仪。
18、一种计算机设备,其特征在于,所述计算机设备包括处理器和与所述处理器耦接的存储器,所述存储器中存储有程序指令,所述程序指令被所述处理器执行时,使得所述处理器执行如权利要求1-7中任一项权利要求所述的静止状态下视觉惯性里程计抗动态物体干扰方法的步骤。
19、一种存储介质,其特征在于,存储有能够实现如权利要求1-7中任一项所述的静止状态下视觉惯性里程计抗动态物体干扰方法的程序指令。
20、本发明实施例由于采用以上技术方案,其具有以下优点:
21、本发明提出了一种静止状态下视觉惯性里程计抗动态物体干扰方法,并使用该方法可快速且高效实现抗动态物体干扰。
22、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种静止状态下视觉惯性里程计抗动态物体干扰方法,其特征在于,包括:
2.根据权利要求1所述的一种静止状态下视觉惯性里程计抗动态物体干扰方法,其特征在于:所述s1包括以下步骤,
3.根据权利要求2所述的一种静止状态下视觉惯性里程计抗动态物体干扰方法,其特征在于:所述s1还包括以下步骤,
4.根据权利要求1所述的一种静止状态下视觉惯性里程计抗动态物体干扰方法,其特征在于:所述s4包括以下步骤:
5.根据权利要求1所述的一种静止状态下视觉惯性里程计抗动态物体干扰方法,其特征在于:所述s4中,imu的加速度小于线速度最小增量阈值或角速度增量小于角速度最小增量阈值后,需要回到s2中判断当前里程计线速度和角速度增量是否都小于阈值。
6.根据权利要求1所述的一种静止状态下视觉惯性里程计抗动态物体干扰方法,其特征在于:所述s2中,若当前里程计线速度和角速度增量都大于阈值,则视觉重新恢复权重和正常添加关键帧。
7.根据权利要求1所述的一种静止状态下视觉惯性里程计抗动态物体干扰方法,其特征在于:所述s4中,视觉重新恢复权重和正常添加关键帧时需要不定期回到s2中判断当前里程计线速度和角速度增量是否都小于阈值。
8.根据权利要求4所述的一种静止状态下视觉惯性里程计抗动态物体干扰方法,其特征在于:在所述s41中,六轴包括三轴加速度计和三轴陀螺仪。
9.一种计算机设备,其特征在于,所述计算机设备包括处理器和与所述处理器耦接的存储器,所述存储器中存储有程序指令,所述程序指令被所述处理器执行时,使得所述处理器执行如权利要求1-7中任一项权利要求所述的静止状态下视觉惯性里程计抗动态物体干扰方法的步骤。
10.一种存储介质,其特征在于,存储有能够实现如权利要求1-7中任一项所述的静止状态下视觉惯性里程计抗动态物体干扰方法的程序指令。
技术总结
本发明提供了一种静止状态下视觉惯性里程计抗动态物体干扰方法,包括:S1、设置里程计线速度和角速度最小增量阈值,根据所述参数判断机体是否处于静止状态;S2、判断当前里程计线速度和角速度增量是否都小于阈值,若小于阈值,则机体处于静止状态;S3、当机体处于静止状态时,以线速度为0,角速度为0作为优化初值,降低视觉权重,同时不添加关键帧进滑窗;S4、根据IMU的加速度最小增量阈值或角速度增量判定其是否大于角速度最小增量阈值,并在IMU的加速度大于线速度最小增量阈值或角速度增量大于角速度最小增量阈值后;本发明提出了一种静止状态下视觉惯性里程计抗动态物体干扰方法,并使用该方法可快速且高效实现抗动态物体干扰。
技术研发人员:陈卓然,刘文学,曾宇,张达,夏滔龙
受保护的技术使用者:广州紫川电子科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!